首页
移动开发
物联网
服务端
编程语言
企业开发
数据库
业界资讯
其他
搜索
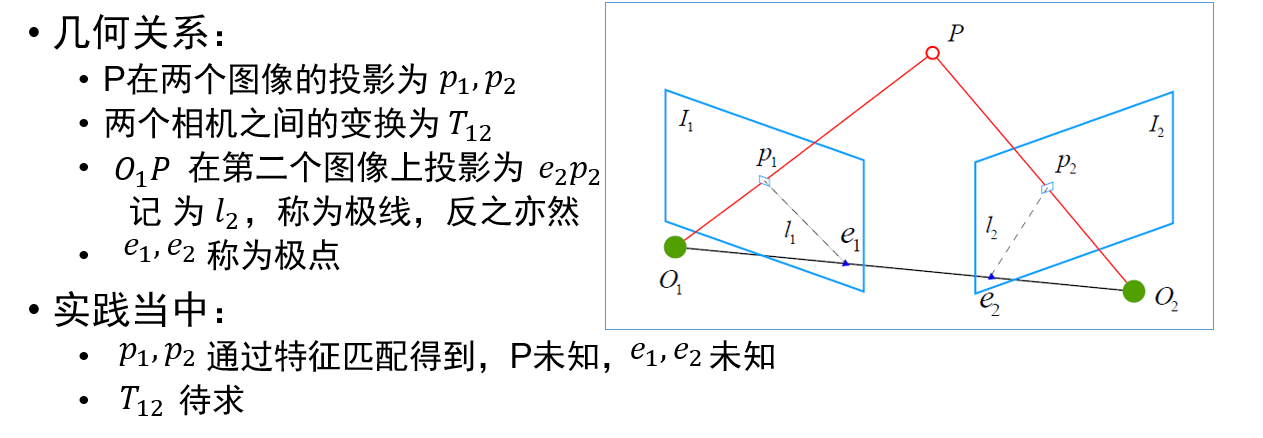
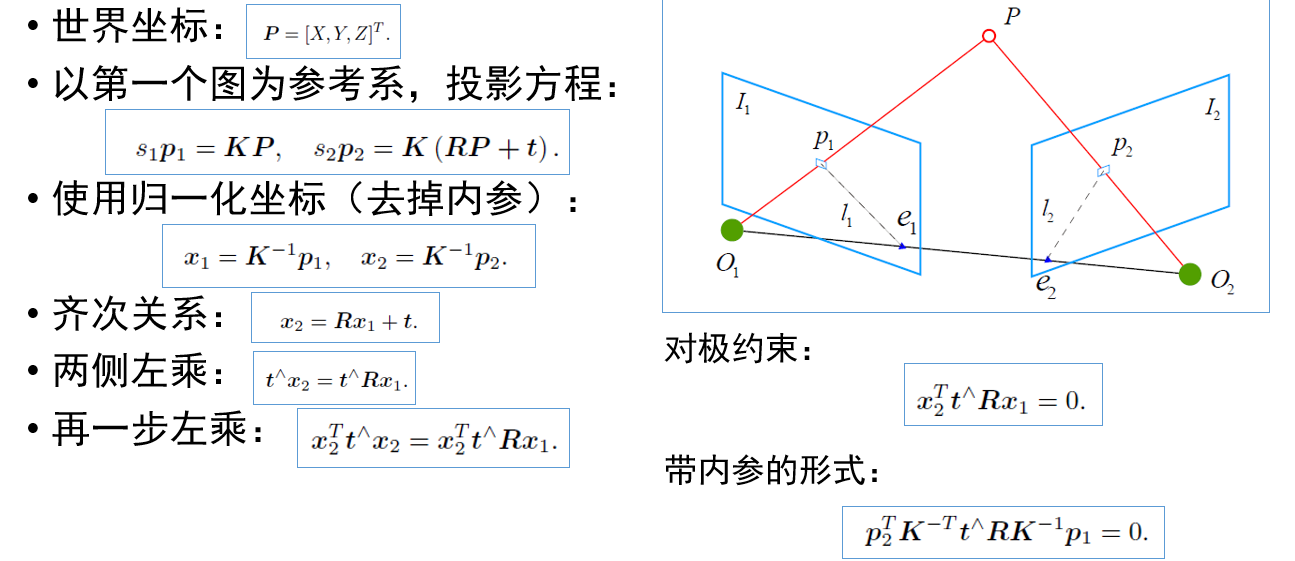
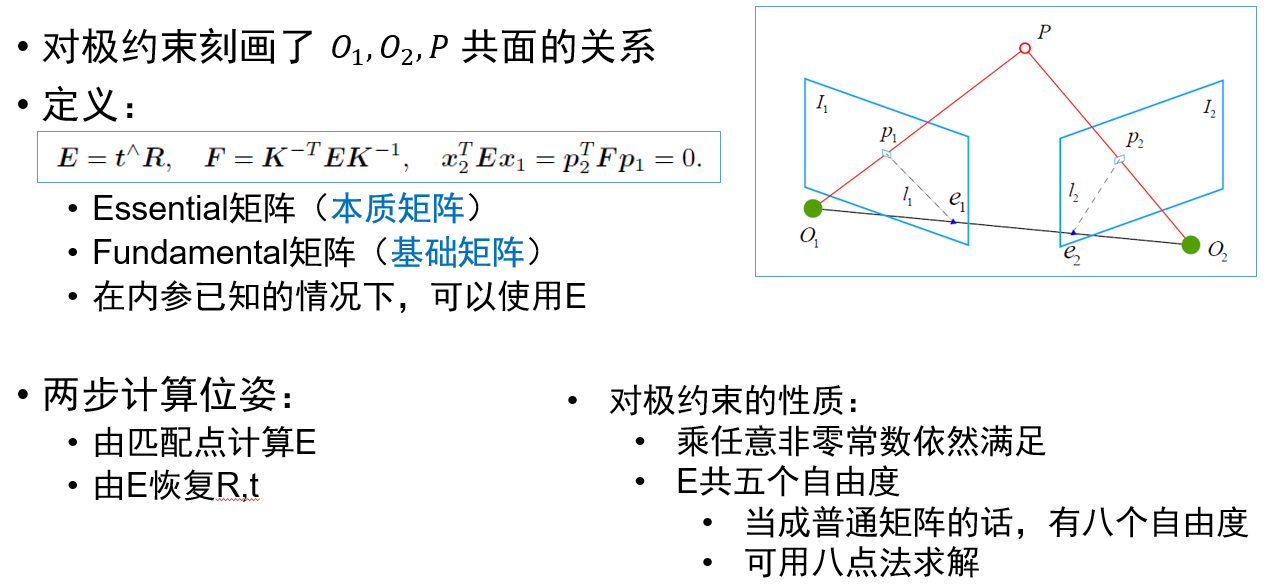
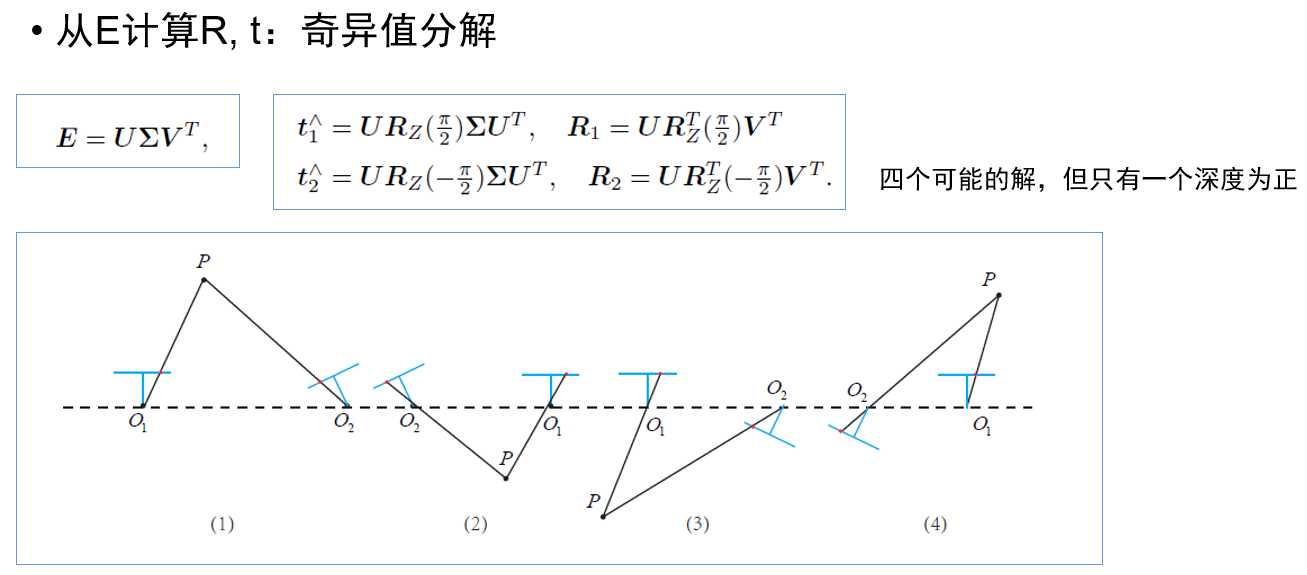
视觉里程计:2D-2D 对极几何
其他
2019-12-05 23:00:56
阅读次数: 0
参考链接:https://mp.weixin.qq.com/s/89IHjqnw-JJ1Ak_YjWdHvA
猜你喜欢
转载自
www.cnblogs.com/long5683/p/11992551.html
视觉里程计:2D-2D 对极几何
视觉SLAM第七讲视觉里程计--- 2D-2D对极约束求解相机运动---代码详细讲解
视觉SLAM——2D-2D:对极几何
2D-2D:对极几何
【OpenCV】 2D-2D:对极几何算法原理
视觉里程计2(SLAM十四讲ch7)-对极几何,三角测量
2D-2D:对极约束
SLAM视觉里程计:图像去畸变与对极几何估计相机运动
《视觉SLAM十四讲精品总结》6.1:VO—— 2D-2D对极约束求位姿R、t
[SLAM](7):视觉里程计知识点纲要(特征点,对极几何,三角测量,PnP,ICP)
视觉定位原理:对极几何与基本矩阵
随手笔记——2D−2D: 对极几何及代码示例
3D视觉(五):对极几何和三角测量
计算机视觉基础4——对极几何(Epipolar Geometry)
计算机视觉对极几何之FEH
计算机视觉——对极几何与基础矩阵
计算机视觉--对极几何与基础矩阵
[OpenCV实战]49 对极几何与立体视觉初探
【立体视觉(二)】之对极几何与关键矩阵
《视觉SLAM十四讲》ch7视觉里程计1学习笔记(4)——实践部分:求解PnP pose_estimation_3D2D
对极几何
第8讲 视觉里程计2 --- 光流
多传感器融合定位(1-3D激光里程计)2-前端里程计NDT
2.本征矩阵 基本矩阵以及对极几何之间的约束关系
基于RGB-D相机的视觉里程计实现(一)(图像坐标转换及图像畸变)
基于RGB-D相机的视觉里程计实现(一)
Visual Odometry(视觉里程计): StereoScan Dense 3d Reconstruction in Real-time
计算机视觉对极几何之Triangulate(三角化)
立体视觉中的对极几何——如何更好更快地寻找对应点
双目视觉之立体标定(利用对极几何计算本征矩阵和基本矩阵)
今日推荐
面壁智能发布 Eurux-8x22B 开源大模型 —— 堪称「理科状元」
开源日报 | 谷歌扶持鸿蒙上位;开源Rabbit R1;Docker加持的安卓手机;微软的焦虑和野心;海尔电器把开放平台关了
中国码农的“35岁魔咒”
蘭雅 CorelDRAW 插件 2024.5.1 国际劳动节版,免费下载
Arc Browser for Windows 1.0 正式 GA
90后程序员开发视频搬运软件、不到一年获利超 700 万,结局很刑!
周排行
OOP第二次作业
java web 乱码问题
android 禁止scrollview 因控件变化自动滚动到底的方法
mysql服务解压版的安装(5.7)
centos7 nginx+tomcat配置https 安装免费SSL Let’s Encrypt
使用Mosquitto遗嘱机制实现感知客户端上下线功能的方法
面向对象之------多态与多态性
开发Teams Tabs应用程序
C# 希尔排序
第2章 Jupyter Notebooks
每日归档
更多
2024-05-06(40)
2024-05-05(0)
2024-05-04(7)
2024-05-03(19)
2024-05-02(0)
2024-05-01(4)
2024-04-30(1)
2024-04-29(40)
2024-04-28(0)
2024-04-27(56)