摘要:
本节重点在于左右像点之间的约束关系,左右像素点之间的约束关系。
本征矩阵E和基本矩阵F可以分别表示上述两约束关系
如非必要,可只看总结
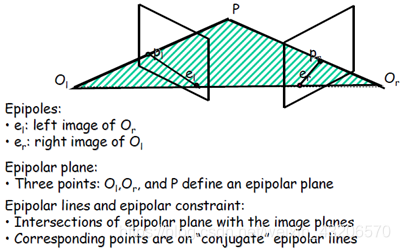
Epipolar geometry is a description of the geometric relationship between a pair of stereo images. It is represented by the fundamental matrix F and is the minimal information necessary to determine the epipolar lines。
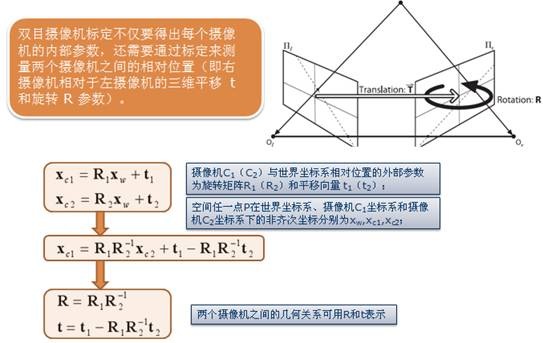
一、数学模型
二、本征矩阵的推导

其中,S与平移矩阵T有关,
F=Mr−TEMl−1
2.性质
本征矩阵是秩为2、自由度为5的其次矩阵(旋转矩阵R和平移矢量t各有3个自由度,由于是齐次矩阵再减去一个自由度。)
基础矩阵是秩为2、自由度为7的齐次矩阵(3×3齐次矩阵有8个独立比率,还有一个满足约束detF=0的约束,所以再减去一个自由度)
二者关系:F is also known as the uncalibrated version of the essential matrix E
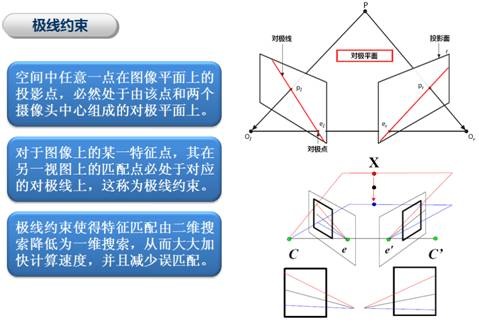
3.意义
意义:基础矩阵和本征矩阵提供了三维点到二维的约束条件。如果我们知道一幅图像中的某一点和基本矩阵,那么就能知道其对应的右图上的点一定是在一条直线上,这样就约束了两视角下的图像中的空间位置。基本矩阵是很有用的一个工具,在三维重建和特征匹配上都可以用到。
参考:
1.http://www.cnblogs.com/gemstone/articles/2294551.html
2.https://www.cnblogs.com/gemstone/archive/2011/12/20/2294805.html
3.https://blog.csdn.net/qq_40213457/article/details/80889187
补充:
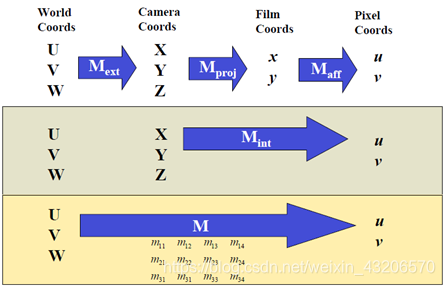
可参考16个相机参数一文。
</div>[添加链接描述](https://blog.csdn.net/weixin_43206570/article/details/84840919)