Article:
H. Xue, D. Q. Huynh and M. Reynolds, "SS-LSTM: A Hierarchical LSTM Model for Pedestrian Trajectory Prediction," 2018 IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Tahoe, NV, 2018, pp. 1186-1194.
Code - implemented with keras:
- link: https://github.com/xuehaouwa/SS-LSTM
- The codes is not complete: datasets, self-defined function, program entry of train & sample and etc. So codes are not directly runnable.

概览
简述
SS-LSTM全称Social-Scene-LSTM,是一种分层的LSTM模型,在已有的考虑相邻路人之间影响的Social-LSTM模型之上额外增加考虑了行人背景的因素。SS-LSTM架构类似Seq2Seq,由3个Encoder生成的向量拼接后形成1个Decoder的输入,并最终做出轨迹预测,有关Encoder和Decoder具体细节下文介绍。
主要结论与贡献
- 提出了SS-LSTM分层模型,相较于其他LSTM-based模型在benchmark数据集上有更好表现。
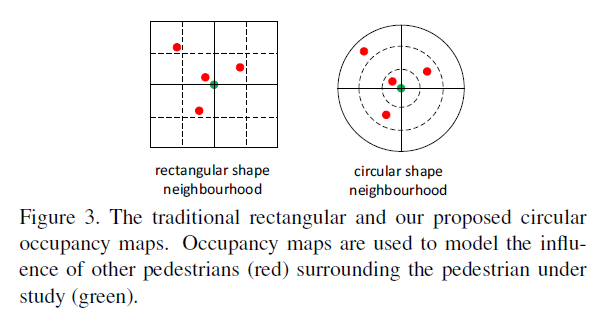
- 引入了圆形的neighborhood划分方式,经过实际对比得出log圆形区域划分相交线性圆形划分和矩形划分有更好表现。
测试
数据集:ETH、UCY(采用Alahi等人提出Social LSTM时使用的数据集,位置信息经过了归一化处理)。
测试指标:FDE、ADE
测试对象:
baseline:linear、Vanilla LSTM
LSTM-based:S-LSTM(g,c,l),SS-LSTM(g,c,l)
g: grid maps, c:circle maps, l: log maps(区别在于区域形状和划分标准不同)
进一步研究方向
- 增加行人的影响权重,例如依据行人间的距离。(此文采用的neighborhood矩阵是Occupancy Tensor而不是Social Tensor,在模型开始跑之间可以完全求出,即每个行人的LSTM数据在运行中不会交叉。详情请见https://www.cnblogs.com/sinoyou/p/11227348.html)
- 为模型加入空间-时间的注意力机制。
- 为模型加入新网络以学习其他因素,例如场景中行人之间的舒适距离。
模型
整体框架

[注意]:图示来自论文,查阅模型代码后发现部分连线有误导性,详情见下一节。
1. Person Scale LSTM Encoder
描述:对于行人\(i\),编码其自身的轨迹序列。
模型输入:\(X_{obs}^i = [(x_1^i,y_1^i), ..., (x_{obs}^i,y_{obs}^i)]\)
模型迭代:\(p_t^i = LSTM_l^{enc}(p_{t-1}^i, x_t^i, y_t^i, W_1)\)
2. Social Scale LSTM Encoder
描述:对于行人\(i\),编码其邻近行人的信息矩阵序列。
模型输入:Occupancy Map \(O_t^i\)
- Occupancy对于每个行人在每个时间片刻都是不同的。
- \(O_t^i(a,b) = \Sigma_{j \in N^i} \alpha_{ab}(x_t^j, y_t^j)\) (其中\(\alpha(.,.)\)是判断函数,根据行人\(j\)是否处在\(i\)编号为\([a,b]\)的区域内,映射至真值域)。
- 本文注重讨论了三种判断函数:
- 方形图
- 线性半径的圆形图
- log半径的圆形图
模型迭代:\(s_o^{i,t} = LSTM_2^{enc}(s_o^{i,t-1}, O_i^t, W_2)\)
3. Scene Scale Encoder
描述:对于行人\(i\),编码其所处图像背景信息。
模型输入:Scene Feature \(F_t\)
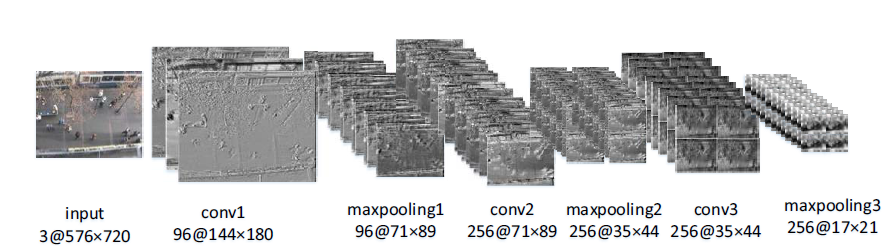
- 从图片到LSTM的输入\(F_t\),需要使用CNN网络提取特征。
- CNN网络同其他LSTMs共同训练,包含三层带池化的卷积层,两层全连接层和防止过拟合的Batch Normalization层。
模型迭代:\(s_c^{i,t} = LSTM_3^{enc}(s_c^{i,t-1}, F_t, W_3)\)
4. Decoder
描述:根据三个Encoder编码出的向量进行解码,做出轨迹预测。
模型输入:将来自Person Scale,Social Scale,Scene Scale编码器的输入拼接。
- \(h_i^t = \varphi(p_t^i, s_o^{i,t}, s_c^{i,t}) = p_t^i \oplus s_o^{i,t} \oplus s_c^{i,t}\)
- [注意]:原文描述与源代码实现存在出入,原文\(h_i^t\)的计算部分是\(1<=t<=obs\),但源代码并不是这样实现的,详情请见下文。
模型迭代:
\[\hat h_t^i = LSTM^{dec}(\hat h_{t-1}^i, h_t^i, W_d)\]
\[(\hat x_i^t, \hat y_i^t) = W_o\hat h_t^i + b_o \]
[注意]:与Social LSTM,Spatio-Temporal Attention Network等不同的是,SS-LSTM模型的decoder输出不再是基于高斯二维分布,而是直接将Decoder的输出经线性变换后即得到预测轨迹的坐标值。
SS-LSTM模型细节内容探讨
在阅读SS-LSTM的原文时由于阅读能力不足/文章描述不充分导致对模型部分细节存在疑惑,好在原文中提供了模型的源代码,因而解答了这些疑惑,在此做一些记录。若笔者理解存在问题,恳请批评指正。
Question 1
模型训练时的损失函数?
模型对于Decoder的输入并未采用二维高斯分布的假设,因此无法使用negative log-likelihood作为损失函数。经过笔者阅读,尚未在原文中发现有关损失函数的描述,在源代码中损失函数采用Mean Square Error。
Question 2
对于Decoder的LSTM,其每步迭代过程中的输入是什么?
原文有指明Decoder每步运行的输入:\(h_i^t = \varphi(p_t^i, s_o^{i,t}, s_c^{i,t}) = p_t^i \oplus s_o^{i,t} \oplus s_c^{i,t}\)(即对应的三个encoder每一步输出的拼接值),但放在实际情况中存在几个矛盾:
- 若\(obs\_length < pred\_length\),则没有足够的\(h_i^t\)可以提供。
- 即使有足够的\(h_i^t\),decoder最多能够预测到\(obs\_length+1\)时刻的位置,因为若要预测\(obs\_length+2\)则需要三个encoder提供对应信息,而实际上又无法提供。
根据查阅源代码,模型中Decoder每运行一步时输入都是一样的,为person scale, social scale, scene scale三个Encoder最终一次输出拼接得到的向量。这是一种Seq2Seq模型中较为简单直接的模型,在解码时都没有使用Decoder上一步的输出作为输入。
model = Sequential()
model.add(Merge([scene_scale, group_model, person_model], mode='sum'))
model.add(RepeatVector(predicting_frame_num)) # 复制拼接向量,使decoder每步输入都一致。
model.add(GRU(128,
input_shape=(predicting_frame_num, 2),
batch_size=batch_size,
return_sequences=True,
stateful=False,
dropout=0.2))因此回到上文中文中所给出的SS-LSTM模型的整体结构(见下图),连接线展现出三个Encoder每步运算后得到的输出都参与了Decoder输入的拼接,但这与源代码是存在矛盾的。
Question 3
通过CNN抽取的背景图像特征\(F_t\),是否需要有下标t?(是否需要虽时间发生变化)
严格来说是需要的,但是由于Scene Scale主要用于捕获图像的非行人特征,而不同时间段图像特征的差异主要在行人,因此\(LSTM_3^{enc}\)的每一步输入可以是一致的,源代码中采用这种思路,即对于每个行人的轨迹预测,抹去了图像特征的时间因素。
scene_scale = CNN(dimensions_1[1], dimensions_1[0])
scene_scale.add(RepeatVector(tsteps)) # 复制CNN输出tsteps=obs_length次,使lstm每步输入相同
scene_scale.add(GRU(hidden_size,
input_shape=(tsteps, 512),
batch_size=batch_size,
return_sequences=False,
stateful=False,
dropout=0.2))Question 4
圆形的邻近区域的数据存储方式?
如下图,对于矩形区域,Occupancy Map的形状为[4,4]或[4x4];而对于圆形区域,Map可按照自行编码习惯映射为矩阵或向量,例如,以半径为第一维度,圆角为第二维度,则Map形状为[3,4]或[3x4]