目录
kinect在ubuntu下的连接方法
参考链接1:https://github.com/OpenKinect/libfreenect2
这个是ubuntu下的kinect驱动包。
里面的readme文件里面有步骤,比较详细。
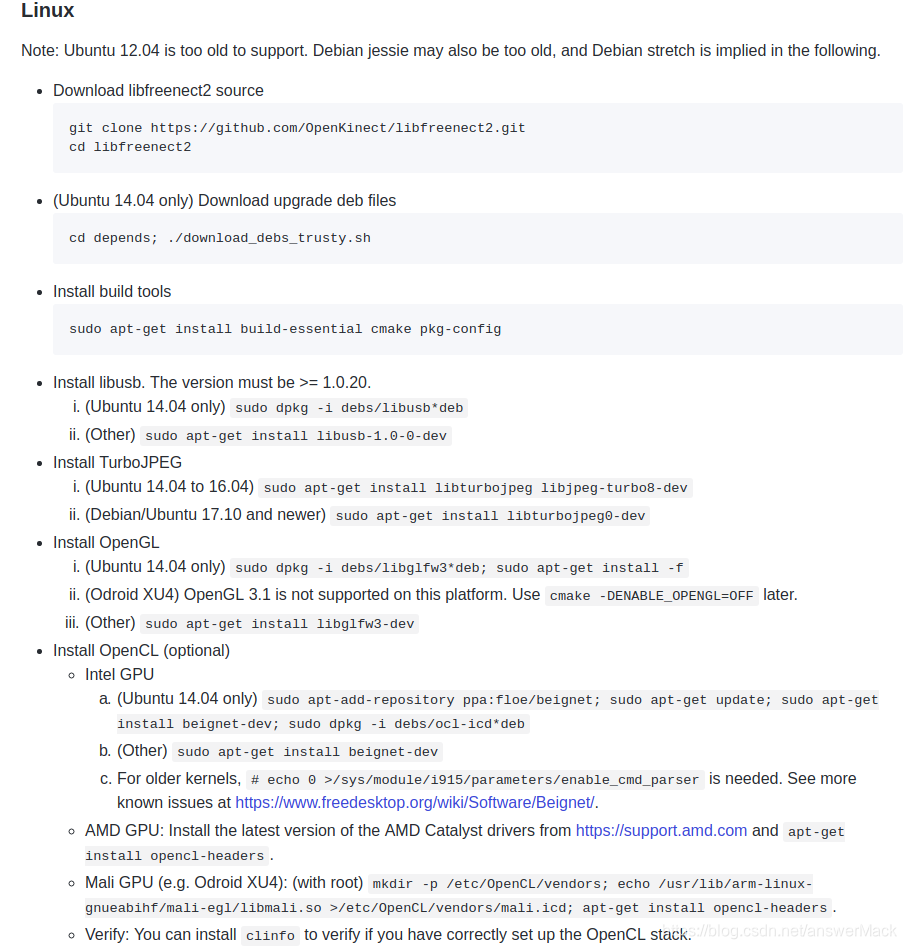
可以用里面的命令启动kinect摄像头
API文档:https://openkinect.github.io/libfreenect2/
参考链接2:https://blog.csdn.net/u012424737/article/details/80609451
中文,其中的图像读取教程是基于https://github.com/catch-twenty-two/libfreenect2ToOpenCV
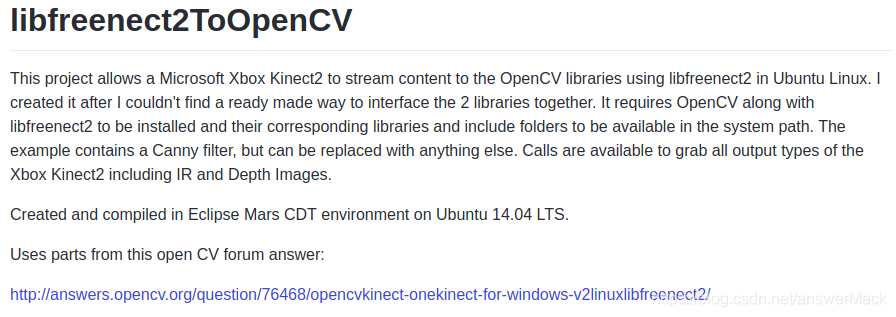
因为本人不会使用eclipse,所以程序未作测试。
后续iai_kinect包中有存照片的命令。
kinect ROS连接
参考链接:https://github.com/code-iai/iai_kinect2
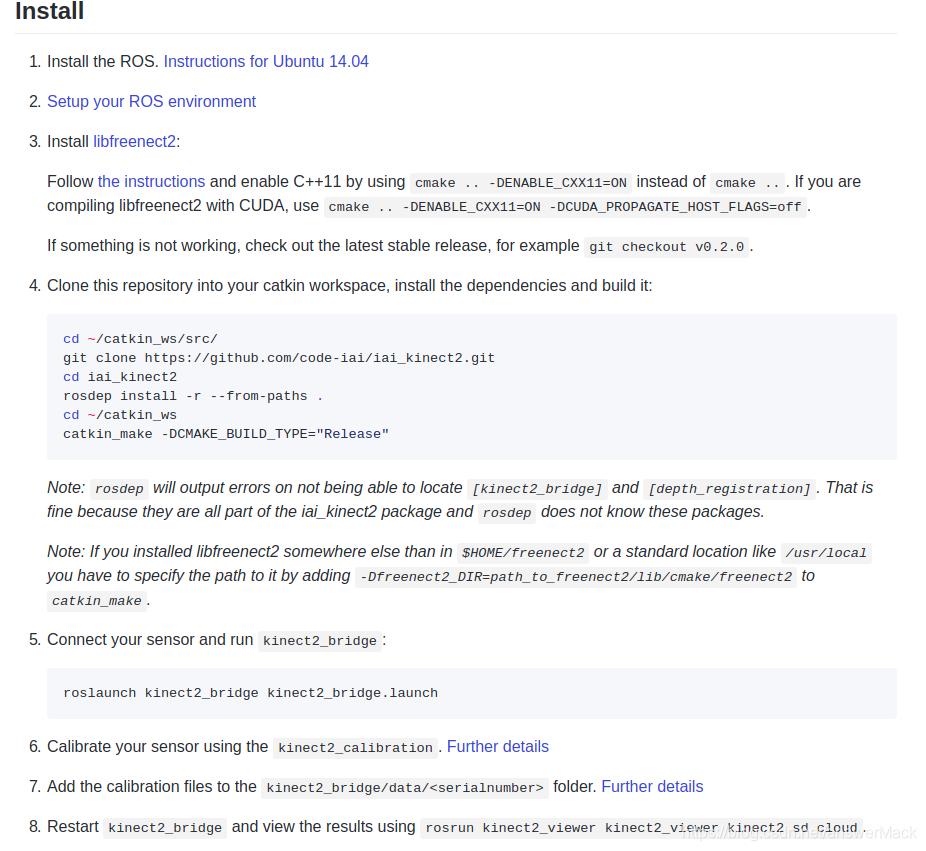
如果后续有安装问题,请细读readme文件。
本人GPU加速没开。
iai_kinect2/kinect2_bridge
操作步骤参考readme文件,已经很详细了:
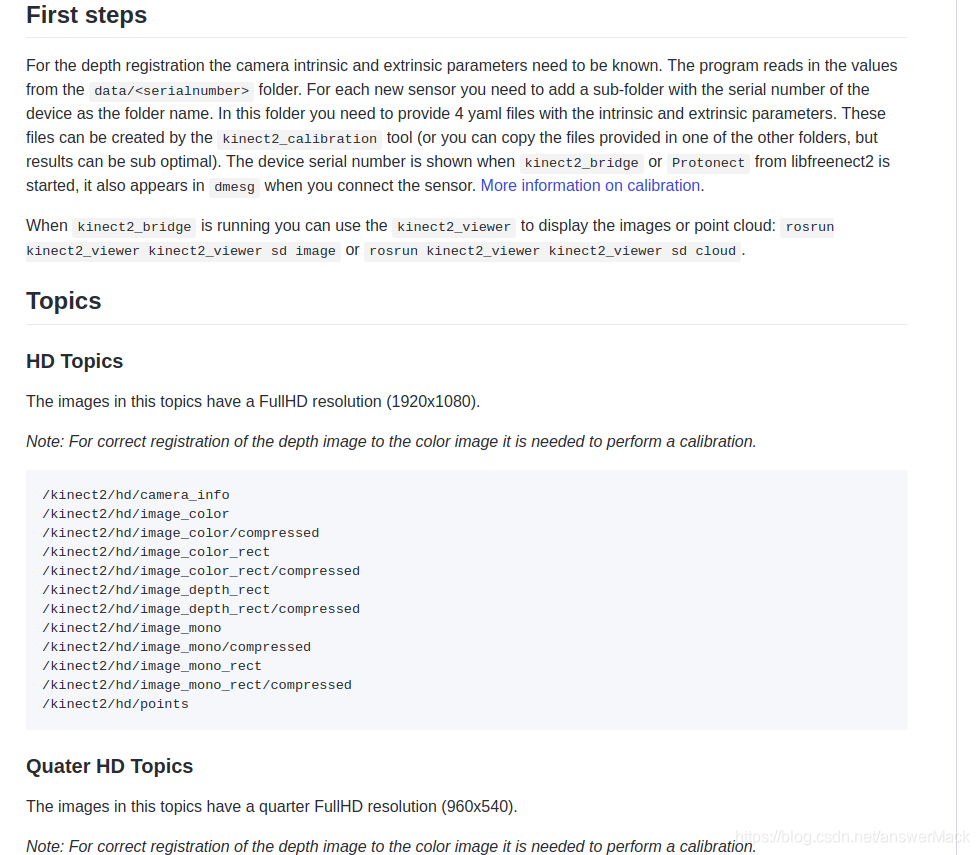
iai_kinect2/kinect2_viewer
readme文件:
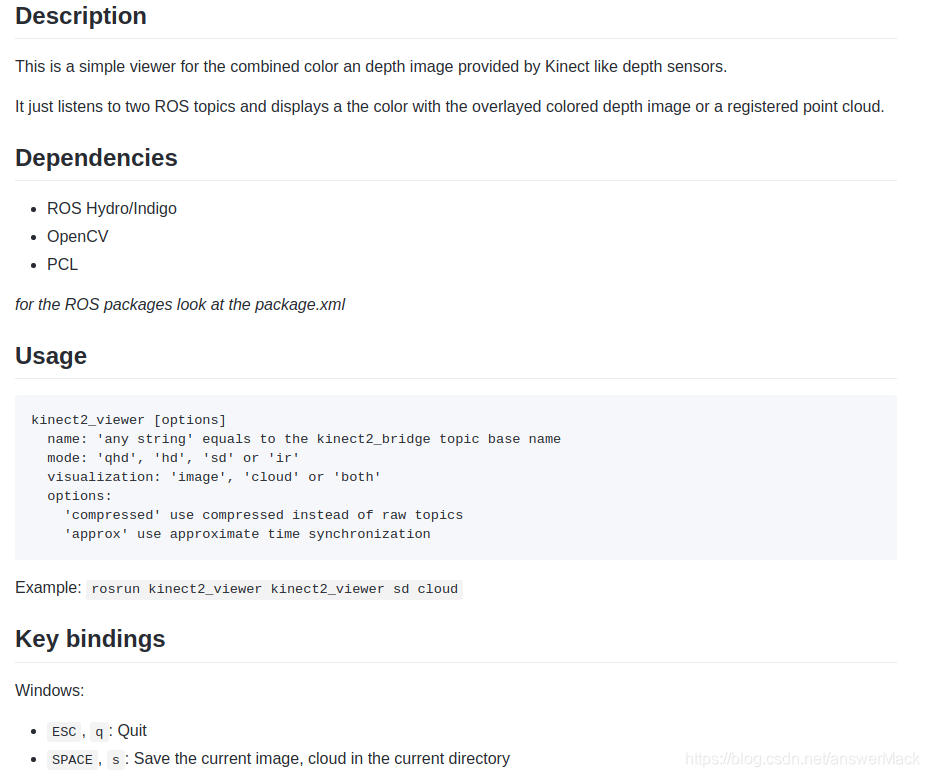
空格和S都是保存。ESC和Q都是退出。
iai_kinect2/kinect2_calibration
kinect内联参数标定:
readme文件:https://github.com/code-iai/iai_kinect2/tree/master/kinect2_calibration
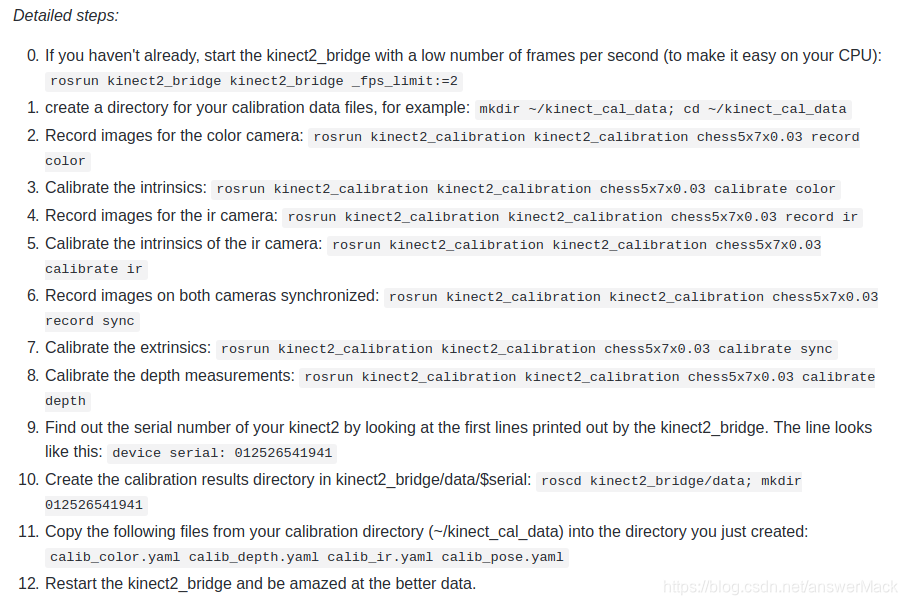
参考链接:https://blog.csdn.net/yangchao_emigmo/article/details/52518106
每一步需要空格保存图片的yaml文件。
程序文件查看:
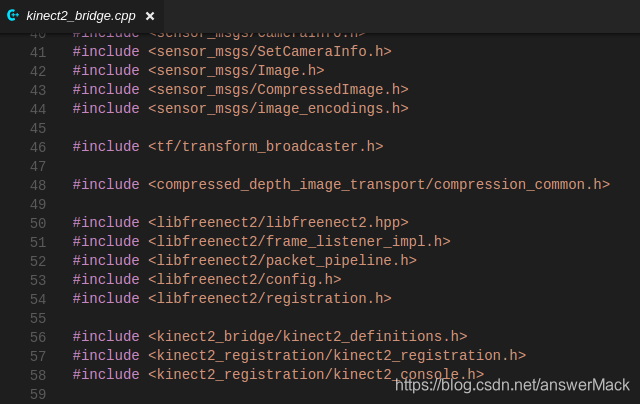
看了bridge文件,引用外部文件的头文件:
例如:
参考https://github.com/code-iai/iai_kinect2#install,readme:
外部的libfreenect2文件夹下的头文件:
我的文件地址:/home/ma/freenect2/libfreenect2/include/libfreenect2
在编译的时候需要加一句:
catkin_make Dfreenect2_DIR=/home/ma/freenect2/libfreenect2/lib/cmake/freenect2
在freenect2包里也有一句话:

引用同一个包的头文件:
在#include <kinect2_bridge/kinect2_definitions.h>
#include <包名/头文件名.h>
(待写)

kinect 外部参数标定
(待写)