版权声明:本文为博主夏日辉的原创文章,未经博主允许不得转载。 https://blog.csdn.net/shanpenghui/article/details/89011336
- cd <你要创建的工作空间存放的路径>
- mkdir -p <工作空间文件名>
- cd <工作空间文件名>
- mkdir -p src
- catkin_create_pkg <功能包名字> roscpp rospy std_msgs sensor_msgs(功能包的依赖)
- cd …
- catkin_make
- 在功能包文件夹的src目录下面添加功能包对应的源码文件(.cpp 笔者是用C++的)
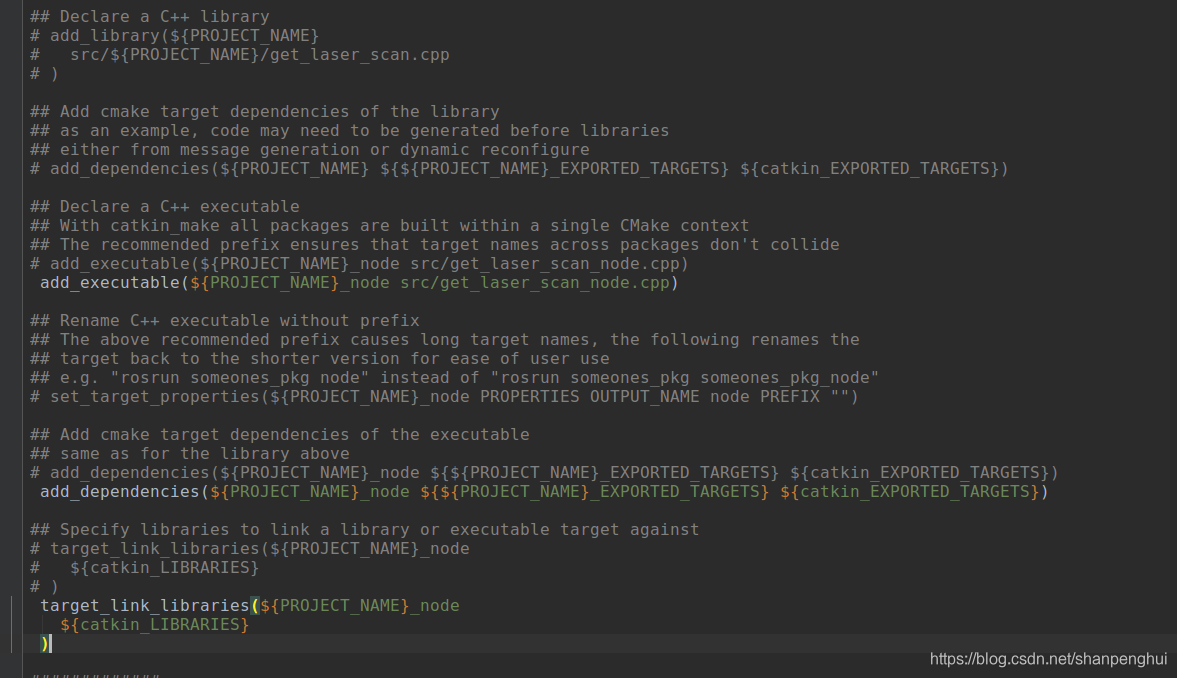
- 因为CLion不会自动修改CMakeList.txt文件,添加源码文件之后,需要在CMakeList.txt里面修改内容:
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/get_laser_scan_node.cpp)
add_executable(${PROJECT_NAME}_node src/get_laser_scan_node.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
)
基本上是add_executable、add_dependencies和target_link_libraries这三句话,关于他们的作用英文解释的比较清楚了,读者自己阅读一下。
- 然后在CLion里面编译完成就OK了。
