版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/u010141928/article/details/80573937
下面先介绍一下关于三角函数的一些性质:
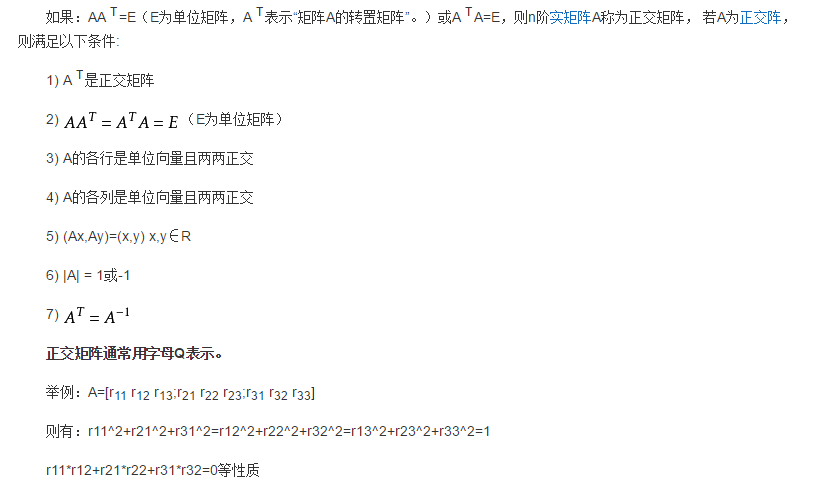
下面介绍一下关于正交矩阵的一些性质:
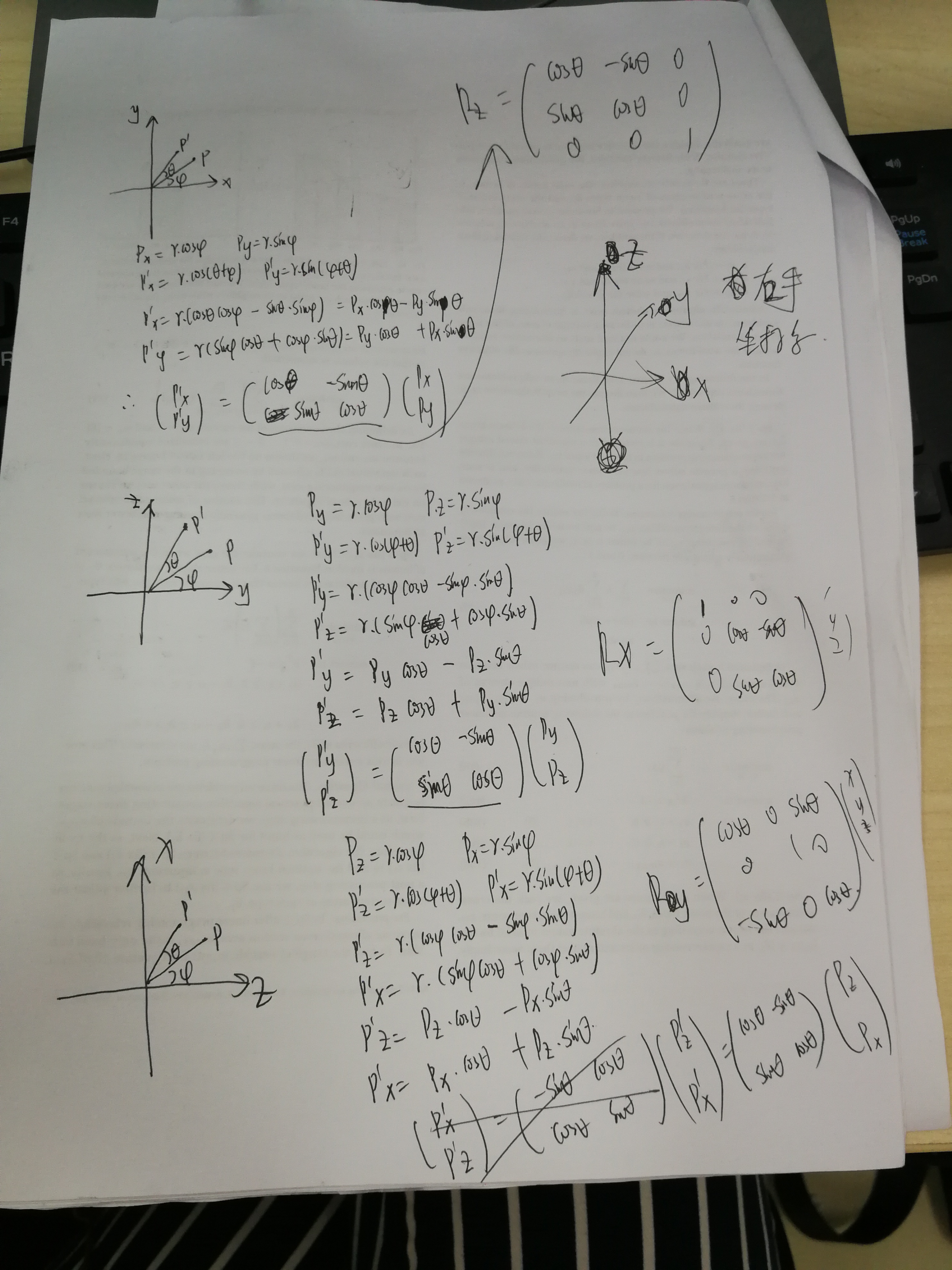
上面是本人使用右手坐标系对3D中旋转操作矩阵计算的推导!!并且旋转的时候默认旋转轴是向上的!!比如绕y轴旋转就是y轴默认是向上的!!
需要注意的是之所以绕y轴旋转不一样原因如下:
其实在推导的过程中最后得到的二维旋转矩阵都是一样的!!
但是最后绕y轴旋转的时候是zx而不是xz,这样就导致最后的三维旋转矩阵不同!!!
在进行旋转的时候坐标轴的方向很重要,可以先确定用左手坐标系还是右手坐标系并把它画出来,然后在逐步进行推导!!