目录
一、立体视觉
立体视觉是一种计算机视觉技术,其目的是从两幅或两幅以上的图像中推理出图像中每个像素点的深度信息。

在第一幅图片中,可以看到使用目标检测算法检测出来的物体,立体视觉只要是针对摄像头到每个物体距离以及物体到物体的距离。如果使用单目相机,在第二幅图片中就不可判断出距离。
1.何为立体视觉?
立体视觉是一种计算机视觉技术,其目的是从两幅或两幅以上的图像中推理出图像中每个像素点的深度信息。
2.立体视觉的应用领域:
机器人、辅助驾驶/无人驾驶、无人机等等。
3.立体视觉的原理:
立体视觉借鉴了人类双眼的“视差"原理,即左、右眼对于真实世界中某一物体的观测是存在差异的我们的大脑正是利用了左、右眼的差异,使得我们能够辨识物体的远近。(视差)
二、单目系统
〇点为相机的光心,Π是摄像头的成像平面。
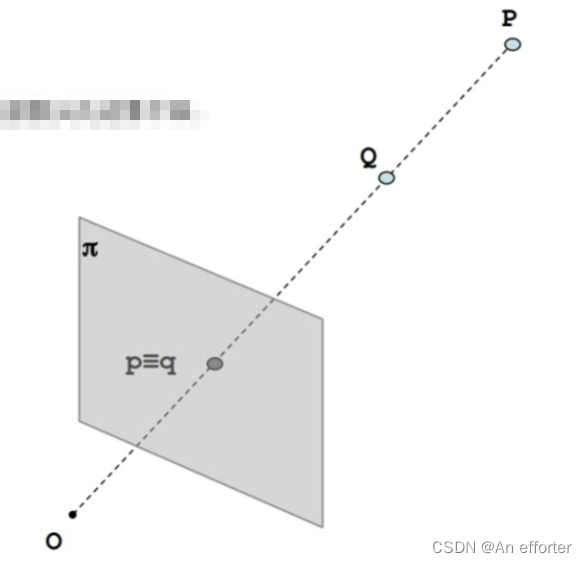
单目系统的弊处就显现出来了,p与q点都在一条直线上,那么在相机成像平面上就看到p=q点。那么就判断不出来p与q离摄像头的距离是多少,就造成了误差。为了能够判断出距离,推出了双目系统。
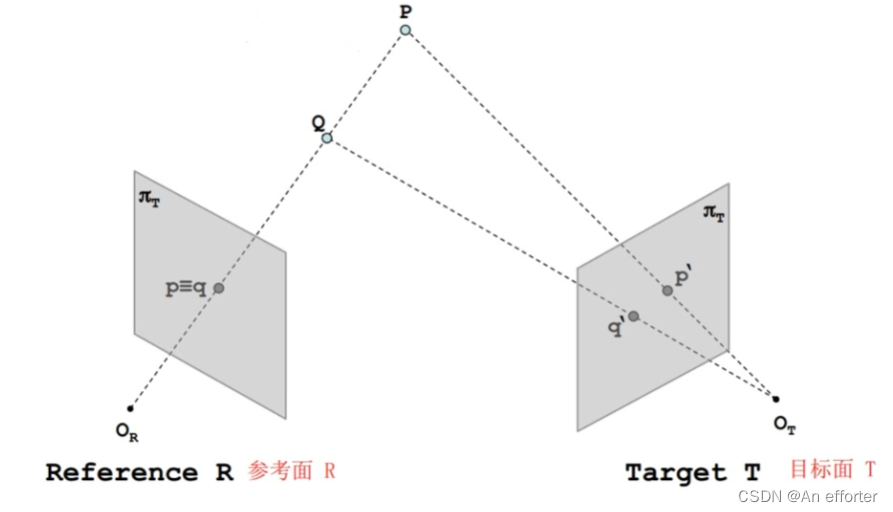
三、双目系统
双目系统就是在单目系统上添加一个相机,从两幅或两幅以上的图像中推理出图像中每个像素点的深度信息。
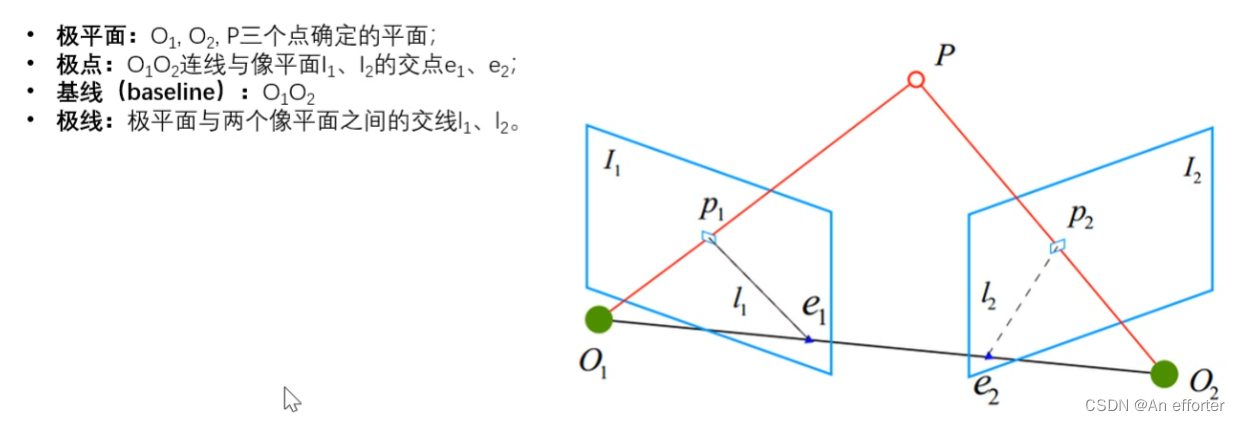
原理公式刨析
模拟上面图片的整个过程以及定义的点线面:
首先,整体从上往下看,勾划出右侧的简易图:
粉色线就是相机的平面(已知),
绿色线 B 就是上述的O1,O2基线(已知),
中间的橙色线Z就是距离(未知),
x 代表Or相机距离P点的水平距离,
p,p` 代表P点在两个相机成像的点,
Xr,Xt 红色线可以看出代表的距离(已知),
w 代表成像平面的宽度(已知),
f 代表焦距(已知)。
下面是公式推导:
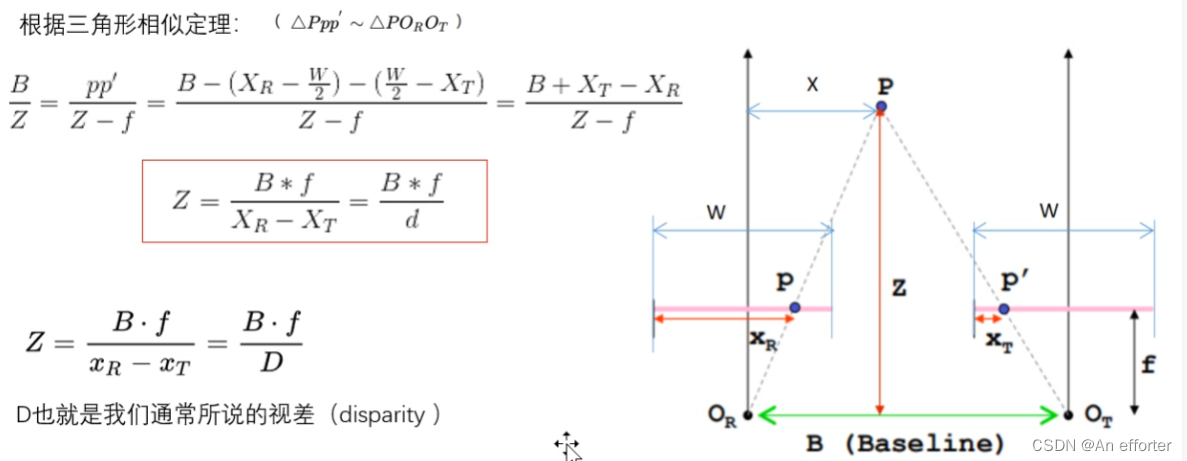
综上:就是借用了相似三角形的原理,记得要统一单位。
这里有一个 视差D 概念:
将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作视差(Disparity)图像。
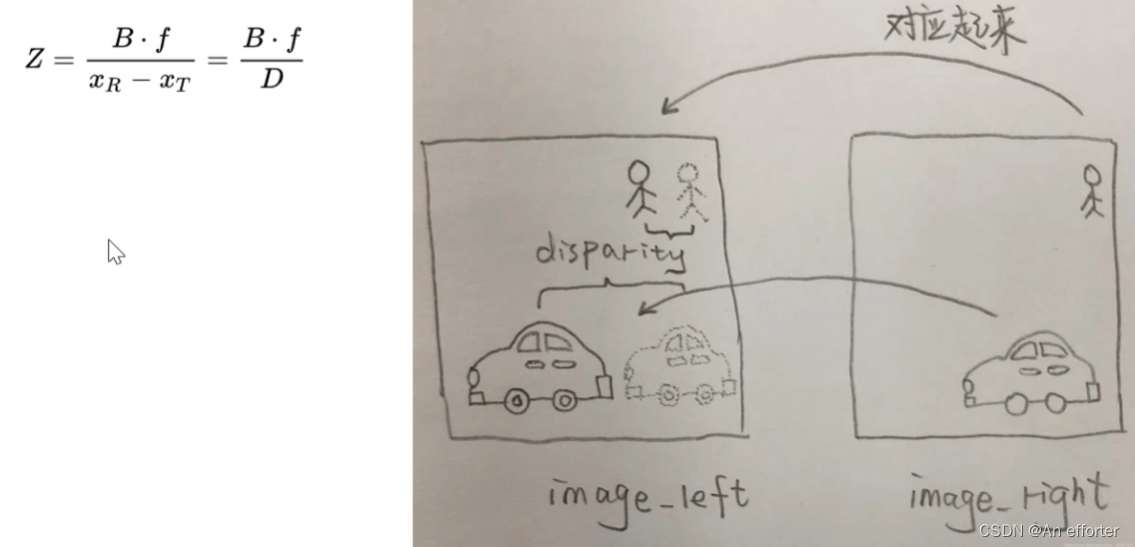
就像上面右边的图片所示:图片中的image-right图对应到image-left,同一空间有这个不同的位置。这就是视差。
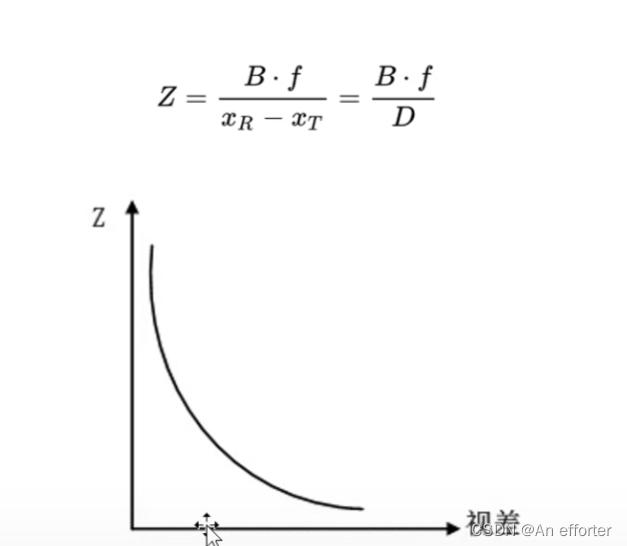
通过公式也能看出来距离与视差是呈现反比的关系。也就是说,距离越远我看到的车越小,那么视差就越小。
后期会更新demo和代码。