文章列表:

Active Convolution: Learning the Shape of Convolution for Image Classification
这篇文章首先将卷积进行参数的拓展,之前都是直接学习权重就是了。之前的卷积都是fixed的采样。比如3*3,就是采样与window中心点相对位置一样的9个点。即:
如果将
进行修改:
也就是说,这里对
(一般是3*3=9个之类的)个参数,每个参数都加了一个offset
.
也就是说,这就是所谓的ACU(active convolution unit)。新增的卷积参数是
.
注意:这里的offset是across channels,也是across spatial dimension的!也就是说,每个通道的offset都是一样的,同时spatial 上的每个点为中心的2*9个offset,都是一样的。
其实我们知道,
- 每个通道共享offset是肯定合理的。首先,同一个点的位置,不同通道只是提取了该点为中心的local的不同类型的feature,但是这些feature都的组合都是表达这个local的同一pixel level的信息。因此,不应该逐个通道采用不同的offset。
- 但是,across spatial dimension进行共享offset就肯定不是很科学。显然,如果让卷积自动根据物体的形状进行变形,那肯定是要对每个spatial点,都要相应的学习一个最优的offest。才能对输入图片的每个位置,adaptive地采样最佳的feature点,从而完成相应的任务。这个在Detection中就特别合理。
##计算方式

前向,插值。反向不贴图了,浪费空间。

Deformable Convolution Networks
刚才我们在第一篇论文讲了,这个offests进行across spatial dimension共享完全不合理啊。特别是对detection等任务。这些任务对物体的形状是很敏感的。
那么,我们得让这个offsets是对每个spatial点,都能有
个参数。注意,这个
就是上篇提到的
,一般是
之类的。
我们算算,假设输入的feature的spatial size是
, emm,我们应该要预测
个参数。其中
那么,显然,是将feature,通过一些卷积,然后生成通道数为
的新的feature,这个新的feature的大小为
. 这些feature的值就是我们原先feature的offests。
如下图:

普通卷积
deformable 卷积
行吧,下面的公式贴图吧~



其实就是对
,找到它的临近4个点,然后插值得到。具体算法和上篇论文差不多。
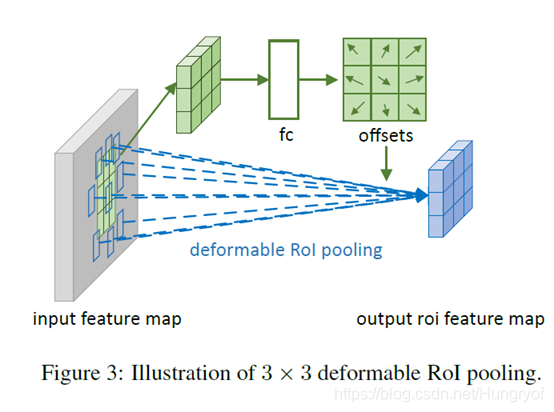
Deformable ROIPooling
不做Detection之类的任务可以不用看。太task-specific了。
普通ROIPooling
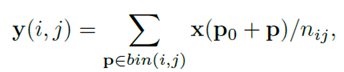
Deformable ROIPooling
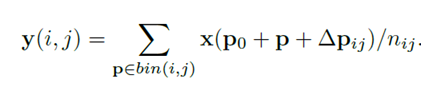
其实类似的,deform conv是对采样点加offsets,自然defrom ROIPooling自然是对bins加offsets操作了。
可视化

我们可以看到,一个点其实是由前一层的9个点采样加权得到,那么这里显示了3层。绿点表示pixel 上的一个点,这个点在前面的第三层其实是由
个点采样加权得到。发现,这写采样点,基本可以覆盖物体的形状。如果是背景的话,也是基本分布在背景区域。
下面是deformable ROIPooling的,可以看到,这些狂基本能移动到bbox的物体内部,从而忽略多余的背景部分。

Deformable conv到底学了什么??
注意:它不是学习了offsets!而是学习了根据不同特征,提取该特征所需要的相应的offsets的能力!!!
这个能力其实就是,上面分支的“conv”的卷积层的参数!
这就是deformable的强大之处,比如,一条狗站着和趴着,当deformable卷积学习时,看到了趴着的狗,上面的分支的conv可以将这个feature作为输入,然后输出“趴着的狗”所需要的offsets,这时候的offsets基本是让下面的分支的卷积的采样点呈现“扁平框”的样式。当然了,如果是看着了“站着的狗”,offsets就会让下面分支的卷积的采样点呈现“更加四四方方点了”(哈哈,狗并不是一个正方形好不好~~),
Deformable ConvNets v2: More Deformable, Better Results
这个没啥好说的啊,简单来说,就是之前v1版本,你要拓展,咋拓展,其实,你都加了offset了,认为每个spatial点的offset都要能学出了,显然剩下的最容易想到的就是加权重了。

论文的两个创新点:
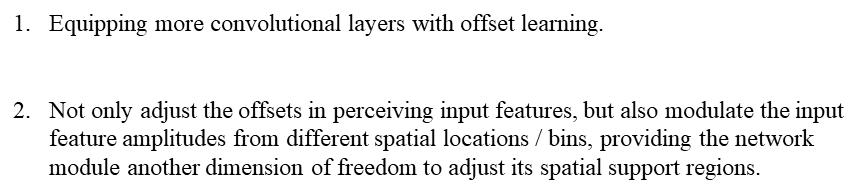
那么,表现就是,上面的一个分支,不再只用一个conv了,用多个conv来提升根据不同特征预测相应的offsets的能力。
其次是,我们需要的参数不再是
了(真的烦,这里又把N写成了K),因为加了一个权重,所以上面的一个分支出来的offsets的通道应该是
。多的一个
的通道就是权重,送入sigmoid,让其为0-1之间就行。

结果不贴了,反正有提升就行。
Locally-Consistent Deformable Convolution Networks for Fine-Grained Action Detection
因为细粒度动作识别,基本都是temporal 信息与spatial信息,用一个module融合,再将信息输入到类似LSTM中。再进行分类。
提取temporal信息基本都是用光流进行的。光流网络难以训练,而且,提取spatial信息需要一个网络,光流又是另一个网络,就造成参数复杂。那么对于细粒度动作识别这个任务,怎么直接从一个提取spatial信息的网络中提取temproal信息呢。
就是,文中认为,如果用deformable卷积,那么两帧之间的offsets的差值就是光流。
因为,如果deformable conv用于动作识别中,因为这个任务的视频基本动作发生者是不会改变的。那么这个deformable如果学习得比较好,那么相当于一种检测关键点的功能。那么显然,这些关键点的变化,就是光流。
我们可以看到,这个offsets是2个自由度的。

动作信息

对于动作识别这个特殊的任务,由于光流的话,每个点的光流是确定的。但是,但是你看下面这张图:
 虚线框是代表第一个位置,那么虚线的绿色点代表第一次的普通卷积的采样点。那么如果假设第一次的位置的deformable使得这个位置变成了虚线的蓝色点。
虚线框是代表第一个位置,那么虚线的绿色点代表第一次的普通卷积的采样点。那么如果假设第一次的位置的deformable使得这个位置变成了虚线的蓝色点。
但是,当我们把卷积核window center往右边移动一个位置,这时候。我们发现,第一行的绿色点的第二点。你发现,这个绿点,针对第一个位置和第二个位置分别有一个offset。那么在
帧时,这个位置又会有2个offset,那么一个点就会又多个offsets!光流咋算,完全没法弄啊。
这时候,我们针对这个任务肯定要让offset的表示不再以window center为中心的了!而是以其本身的位置点为中心。也就是说,一个点的位置,就一个offset!而不是之前一个点的位置,根据其属于的windows center不同,有多个offsets(比如3*3的,一个点有9的offsets)
这时候,我么看第二个图,不解释了。你看得懂的。
那么,对于这个local-consistent的卷积,形式就是下面:
对于,local-consistent 卷积,由于每个点都是一个offset,不会根据window center的中心而改变。那么这个offset其实可以相当于直接认为,是先对feature进行shift操作,然后再进行常规卷积。
 话说回来,其实自定义卷积操作,基本是要转换成常规卷积来弄的。一个方法就是,先将feature进行一下特定操作。再用常规卷积来卷。比如对于partial conv等等吧。看着很高端,其实很简单。
话说回来,其实自定义卷积操作,基本是要转换成常规卷积来弄的。一个方法就是,先将feature进行一下特定操作。再用常规卷积来卷。比如对于partial conv等等吧。看着很高端,其实很简单。
下面是这个任务的网络图。解释略。
