什么是卷积神经网络?
卷积神经网络可以用于图像和语音识别等领域。
图片输入到神经网络的是像素矩阵。卷积神经网络=卷积+神经网络。卷积也就是说神经网络不再是对每个像素的输入信息做处理了,而是图片上每一小块像素区域进行处理, 这种做法加强了图片信息的连续性. 使得神经网络能看到图形, 而非一个点. 这种做法同时也加深了神经网络对图片的理解。
具体来看,卷积神经网络有一个批量过滤器,持续不断的在图片上滚动收集图片里的信息,每一次收集的时候都只是收集一小块像素区域, 然后把收集来的信息进行整理, 这时候整理出来的信息有了一些实际上的呈现, 比如这时的神经网络能看到一些边缘的图片信息。
然后以同样的步骤, 用类似的批量过滤器扫过产生的这些边缘信息, 神经网络从这些边缘信息里面总结出更高层的信息结构,比如说总结的边缘能够画出眼睛,鼻子等等. 再经过一次过滤, 脸部的信息也从这些眼睛鼻子的信息中被总结出来。
最后我们再把这些信息套入几层普通的全连接神经层进行分类, 这样就能得到输入的图片能被分为哪一类的结果了.
池化(Pooling)
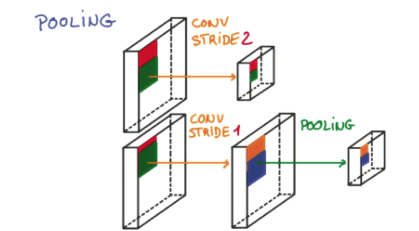
研究发现, 在每一次卷积的时候, 神经层可能会无意地丢失一些信息. 这时, 池化 (pooling) 就可以很好地解决这一问题. 而且池化是一个筛选过滤的过程, 能将 layer 中有用的信息筛选出来, 给下一个层分析. 同时也减轻了神经网络的计算负担 。 也就是说在卷积的时候, 我们不压缩长宽, 尽量地保留更多信息, 压缩的工作就交给池化了,这样的一项附加工作能够很有效的提高准确性.
流行的CNN结构
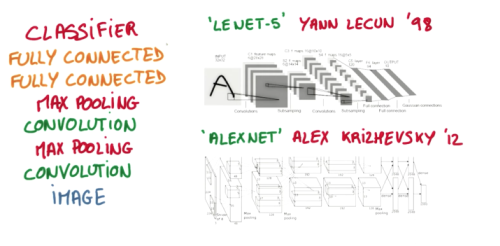
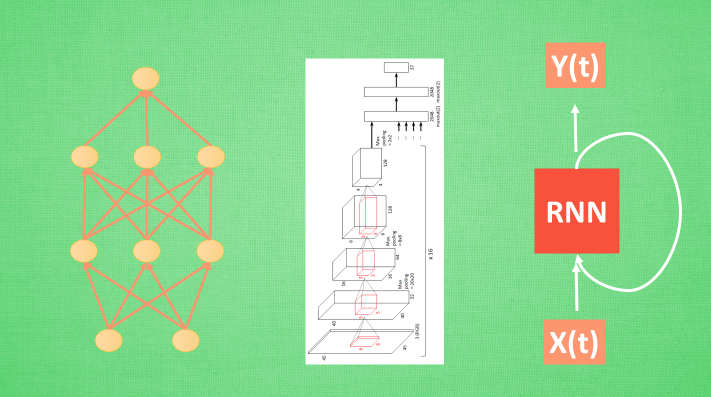
比较流行的一种搭建结构是这样, 从下到上的顺序, 首先是输入的图片(image), 经过一层卷积层 (convolution), 然后在用池化(pooling)方式处理卷积的信息, 这里使用的是 max pooling 的方式. 然后在经过一次同样的处理, 把得到的第二次处理的信息传入两层全连接的神经层 (fully connected),这也是一般的两层神经网络层,最后在接上一个分类器(classifier)进行分类预测。
CNN in PyTorch
MNIST手写数据
import torch
import torch.nn as nn
import torch.utils.data as Data
import torchvision # 数据库模块
import matplotlib.pyplot as plt
torch.manual_seed(1) # reproducible
# Hyper Parameters
EPOCH = 1 # 训练整批数据多少次, 为了节约时间, 我们只训练一次
BATCH_SIZE = 50
LR = 0.001 # 学习率
DOWNLOAD_MNIST = True # 如果你已经下载好了mnist数据就写上 False
# Mnist 手写数字
train_data = torchvision.datasets.MNIST(
root='./mnist/', # 保存或者提取位置
train=True, # this is training data
transform=torchvision.transforms.ToTensor(), # 转换 PIL.Image or numpy.ndarray 成
# torch.FloatTensor (C x H x W), 训练的时候 normalize 成 [0.0, 1.0] 区间
download=DOWNLOAD_MNIST, # 没下载就下载, 下载了就不用再下了
)
同样, 我们除了训练数据, 还给一些测试数据, 测试看看它有没有训练好.
test_data = torchvision.datasets.MNIST(root='./mnist/', train=False)
# 批训练 50samples, 1 channel, 28x28 (50, 1, 28, 28)
train_loader = Data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)
# 为了节约时间, 我们测试时只测试前2000个
test_x = torch.unsqueeze(test_data.test_data, dim=1).type(torch.FloatTensor)[:2000]/255. # shape from (2000, 28, 28) to (2000, 1, 28, 28), value in range(0,1)
test_y = test_data.test_labels[:2000]
CNN模型
和以前一样, 我们用一个 class 来建立 CNN 模型. 这个 CNN 整体流程是 卷积(Conv2d) -> 激励函数(ReLU) -> 池化, 向下采样 (MaxPooling) -> 再来一遍 -> 展平多维的卷积成的特征图 -> 接入全连接层 (Linear) -> 输出
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.conv1 = nn.Sequential( # input shape (1, 28, 28)
nn.Conv2d(
in_channels=1, # input height
out_channels=16, # n_filters
kernel_size=5, # filter size
stride=1, # filter movement/step
padding=2, # 如果想要 con2d 出来的图片长宽没有变化, padding=(kernel_size-1)/2 当 stride=1
), # output shape (16, 28, 28)
nn.ReLU(), # activation
nn.MaxPool2d(kernel_size=2), # 在 2x2 空间里向下采样, output shape (16, 14, 14)
)
self.conv2 = nn.Sequential( # input shape (16, 14, 14)
nn.Conv2d(16, 32, 5, 1, 2), # output shape (32, 14, 14)
nn.ReLU(), # activation
nn.MaxPool2d(2), # output shape (32, 7, 7)
)
self.out = nn.Linear(32 * 7 * 7, 10) # fully connected layer, output 10 classes
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
x = x.view(x.size(0), -1) # 展平多维的卷积图成 (batch_size, 32 * 7 * 7) view函数用来改变形状
output = self.out(x)
return output
训练
下面我们开始训练, 将 x y 都用 Variable 包起来, 然后放入 cnn 中计算 output, 最后再计算误差. 下面代码省略了计算精确度 accuracy 的部分
optimizer = torch.optim.Adam(cnn.parameters(), lr=LR) # optimize all cnn parameters
loss_func = nn.CrossEntropyLoss() # the target label is not one-hotted
# training and testing
for epoch in range(EPOCH):
for step, (b_x, b_y) in enumerate(train_loader): # 分配 batch data, normalize x when iterate train_loader
output = cnn(b_x) # cnn output
loss = loss_func(output, b_y) # cross entropy loss
optimizer.zero_grad() # clear gradients for this training step
loss.backward() # backpropagation, compute gradients
optimizer.step() # apply gradients
"""
...
Epoch: 0 | train loss: 0.0306 | test accuracy: 0.97
Epoch: 0 | train loss: 0.0147 | test accuracy: 0.98
Epoch: 0 | train loss: 0.0427 | test accuracy: 0.98
Epoch: 0 | train loss: 0.0078 | test accuracy: 0.98
"""
最后我们再来取10个数据, 看看预测的值到底对不对:
test_output = cnn(test_x[:10])
pred_y = torch.max(test_output, 1)[1].data.numpy().squeeze()
print(pred_y, 'prediction number')
print(test_y[:10].numpy(), 'real number')
"""
[7 2 1 0 4 1 4 9 5 9] prediction number
[7 2 1 0 4 1 4 9 5 9] real number
"""
什么是循环神经网络
序列数据
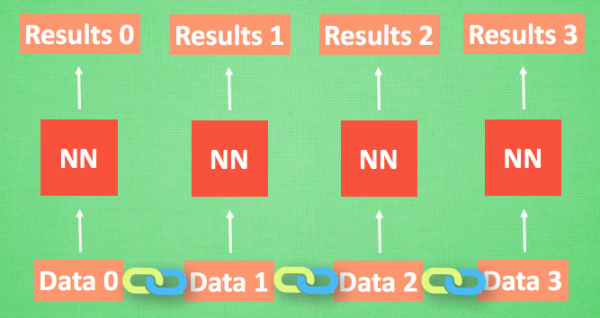
我们想象现在有一组序列数据 data 0,1,2,3. 在当预测 result0 的时候,我们基于的是 data0, 同样在预测其他数据的时候, 我们也都只单单基于单个的数据. 每次使用的神经网络都是同一个 NN. 不过这些数据是有关联 顺序的 , 就像在厨房做菜, 酱料 A要比酱料 B 早放, 不然就串味了. 所以普通的神经网络结构并不能让 NN 了解这些数据之间的关联.
处理序列数据的神经网络
让神经网络也具备这种记住之前发生的事的能力. 再分析 Data0 的时候, 我们把分析结果存入记忆. 然后当分析 data1的时候, NN会产生新的记忆, 但是新记忆和老记忆是没有联系的. 我们就简单的把老记忆调用过来, 一起分析. 如果继续分析更多的有序数据 , RNN就会把之前的记忆都累积起来, 一起分析.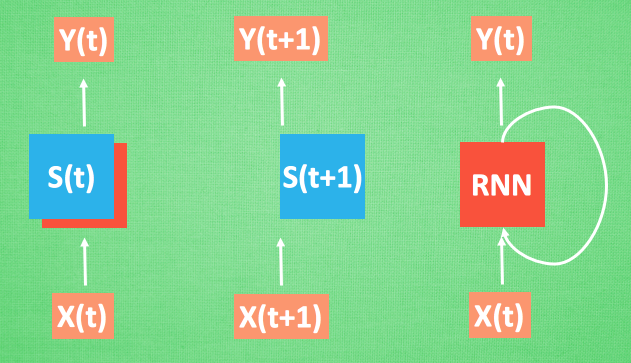
每次 RNN 运算完之后都会产生一个对于当前状态的描述 , state. 我们用简写 S( t) 代替, 然后这个 RNN开始分析 x(t+1) , 他会根据 x(t+1)产生s(t+1), 不过此时 y(t+1) 是由 s(t) 和 s(t+1) 共同创造的. 所以我们通常看到的 RNN 也可以表达成这种样子.
什么是 LSTM 循环神经网络
RNN的弊端
看看 RNN是怎样学习的吧. 红烧排骨这个信息原始记忆要进过长途跋涉才能抵达最后一个时间点. 然后我们得到误差, 而且在 反向传递 得到的误差的时候, 他在每一步都会 乘以一个自己的参数 W.
如果这个 W 是一个小于1 的数, 比如0.9. 这个0.9 不断乘以误差, 误差传到初始时间点也会是一个接近于零的数, 所以对于初始时刻, 误差相当于就消失了. 我们把这个问题叫做梯度消失或者梯度弥散 Gradient vanishing. 反之如果 W 是一个大于1 的数, 比如1.1 不断累乘, 则到最后变成了无穷大的数, RNN被这无穷大的数撑死了, 这种情况我们叫做梯度爆炸, Gradient exploding. 这就是普通 RNN 没有办法回忆起久远记忆的原因.
LSTM
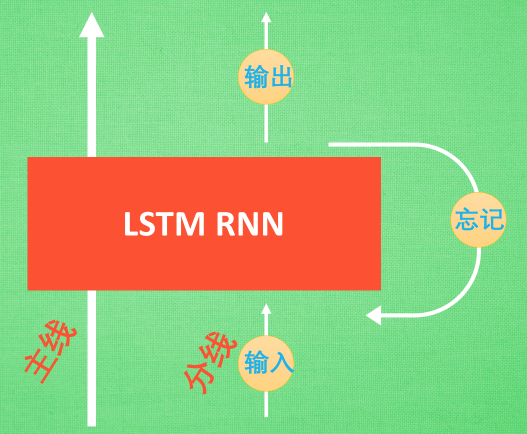
LSTM 就是为了解决这个问题而诞生的. LSTM 和普通 RNN 相比, 多出了三个控制器. (输入控制, 输出控制, 忘记控制). 现在, LSTM RNN 内部的情况是这样。
他多了一个 控制全局的记忆, 我们用粗线代替. 为了方便理解, 我们把粗线想象成电影或游戏当中的主线剧情. 而原本的 RNN 体系就是分线剧情. 三个控制器都是在原始的 RNN 体系上, 我们先看 输入方面 , 如果此时的分线剧情对于剧终结果十分重要, 输入控制就会将这个分线剧情按重要程度 写入主线剧情 进行分析. 再看 忘记方面, 如果此时的分线剧情更改了我们对之前剧情的想法, 那么忘记控制就会将之前的某些主线剧情忘记, 按比例替换成现在的新剧情. 所以 主线剧情的更新就取决于输入 和忘记 控制. 最后的输出方面, 输出控制会基于目前的主线剧情和分线剧情判断要输出的到底是什么.基于这些控制机制, LSTM 就像延缓记忆衰退的良药, 可以带来更好的结果.
RNN 分类
MNIST手写数据
import torch
from torch import nn
import torchvision.datasets as dsets
import torchvision.transforms as transforms
import matplotlib.pyplot as plt
torch.manual_seed(1) # reproducible
# Hyper Parameters
EPOCH = 1 # 训练整批数据多少次, 为了节约时间, 我们只训练一次
BATCH_SIZE = 64
TIME_STEP = 28 # rnn 时间步数 / 图片高度
INPUT_SIZE = 28 # rnn 每步输入值 / 图片每行像素
LR = 0.01 # learning rate
DOWNLOAD_MNIST = True # 如果你已经下载好了mnist数据就写上 Fasle
# Mnist 手写数字
train_data = torchvision.datasets.MNIST(
root='./mnist/', # 保存或者提取位置
train=True, # this is training data
transform=torchvision.transforms.ToTensor(), # 转换 PIL.Image or numpy.ndarray 成
# torch.FloatTensor (C x H x W), 训练的时候 normalize 成 [0.0, 1.0] 区间
download=DOWNLOAD_MNIST, # 没下载就下载, 下载了就不用再下了
)
test_data = torchvision.datasets.MNIST(root='./mnist/', train=False)
# 批训练 50samples, 1 channel, 28x28 (50, 1, 28, 28)
train_loader = Data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)
# 为了节约时间, 我们测试时只测试前2000个
test_x = torch.unsqueeze(test_data.test_data, dim=1).type(torch.FloatTensor)[:2000]/255. # shape from (2000, 28, 28) to (2000, 1, 28, 28), value in range(0,1)
test_y = test_data.test_labels[:2000]
RNN模型
和以前一样, 我们用一个 class 来建立 RNN 模型. 这个 RNN 整体流程是
(input0, state0) -> LSTM -> (output0, state1);
(input1, state1) -> LSTM -> (output1, state2);
…
(inputN, stateN)-> LSTM -> (outputN, stateN+1);
outputN -> Linear -> prediction. 通过LSTM分析每一时刻的值, 并且将这一时刻和前面时刻的理解合并在一起, 生成当前时刻对前面数据的理解或记忆. 传递这种理解给下一时刻分析.
class RNN(nn.Module):
def __init__(self):
super(RNN, self).__init__()
self.rnn = nn.LSTM( # LSTM 效果要比 nn.RNN() 好多了
input_size=28, # 图片每行的数据像素点
hidden_size=64, # rnn hidden unit
num_layers=1, # 有几层 RNN layers
batch_first=True, # input & output 会是以 batch size 为第一维度的特征集 e.g. (batch, time_step, input_size)
)
self.out = nn.Linear(64, 10) # 输出层
def forward(self, x):
# x shape (batch, time_step, input_size)
# r_out shape (batch, time_step, output_size)
# h_n shape (n_layers, batch, hidden_size) LSTM 有两个 hidden states, h_n 是分线, h_c 是主线
# h_c shape (n_layers, batch, hidden_size)
r_out, (h_n, h_c) = self.rnn(x, None) # None 表示 hidden state 会用全0的 state
# 选取最后一个时间点的 r_out 输出
# 这里 r_out[:, -1, :] 的值也是 h_n 的值
out = self.out(r_out[:, -1, :])
return out
rnn = RNN()
print(rnn)
"""
RNN (
(rnn): LSTM(28, 64, batch_first=True)
(out): Linear (64 -> 10)
)
"""
训练
我们将图片数据看成一个时间上的连续数据, 每一行的像素点都是这个时刻的输入, 读完整张图片就是从上而下的读完了每行的像素点. 然后我们就可以拿出 RNN 在最后一步的分析值判断图片是哪一类了.
optimizer = torch.optim.Adam(rnn.parameters(), lr=LR) # optimize all parameters
loss_func = nn.CrossEntropyLoss() # the target label is not one-hotted
# training and testing
for epoch in range(EPOCH):
for step, (x, b_y) in enumerate(train_loader): # gives batch data
b_x = x.view(-1, 28, 28) # reshape x to (batch, time_step, input_size)
output = rnn(b_x) # rnn output
loss = loss_func(output, b_y) # cross entropy loss
optimizer.zero_grad() # clear gradients for this training step
loss.backward() # backpropagation, compute gradients
optimizer.step() # apply gradients
"""
...
Epoch: 0 | train loss: 0.0945 | test accuracy: 0.94
Epoch: 0 | train loss: 0.0984 | test accuracy: 0.94
Epoch: 0 | train loss: 0.0332 | test accuracy: 0.95
Epoch: 0 | train loss: 0.1868 | test accuracy: 0.96
"""
最后我们再来取10个数据, 看看预测的值到底对不对:
test_output = rnn(test_x[:10].view(-1, 28, 28))
pred_y = torch.max(test_output, 1)[1].data.numpy().squeeze()
print(pred_y, 'prediction number')
print(test_y[:10], 'real number')
"""
[7 2 1 0 4 1 4 9 5 9] prediction number
[7 2 1 0 4 1 4 9 5 9] real number
"""
RNN 回归
这一次用RNN预测时间序列
训练数据
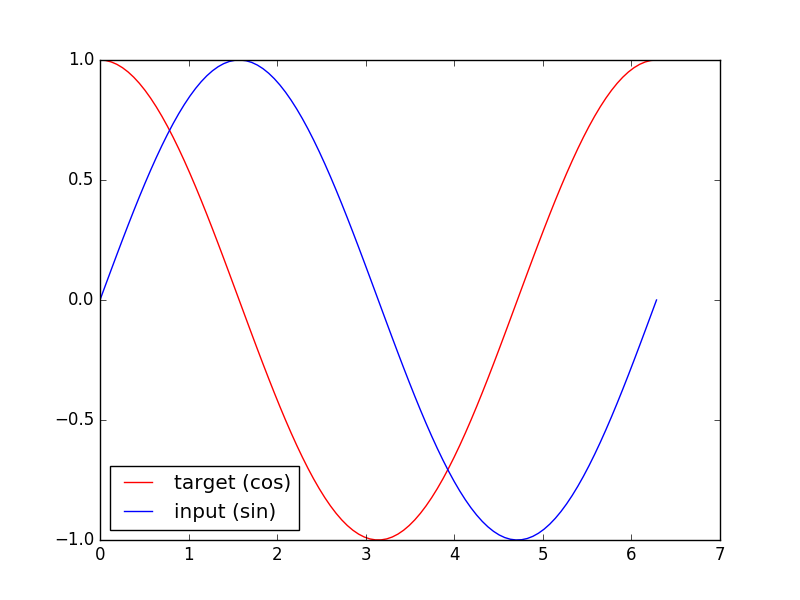
我们要用到的数据就是这样的一些数据, 我们想要用 sin 的曲线预测出 cos 的曲线.
import torch
from torch import nn
import numpy as np
torch.manual_seed(1)
# Hyper Parameters
TIME_STEP = 10 # rnn time step
INPUT_SIZE = 1 # rnn input size
LR = 0.02 # learning rate
# show data
steps = np.linspace(0, np.pi*2, 100, dtype=np.float32) # x轴
x_np = np.sin(steps) # 输入
y_np = np.cos(steps) # 预测
RNN模型
这一次的 RNN, 我们对每一个 r_out 都得放到 Linear 中去计算出预测的 output, 所以我们能用一个 for loop 来循环计算. 这点是 Tensorflow 望尘莫及的!
lass RNN(nn.Module):
def __init__(self):
super(RNN, self).__init__()
self.rnn = nn.RNN( # 这回一个普通的 RNN 就能胜任
input_size=1,
hidden_size=32, # rnn hidden unit
num_layers=1, # 有几层 RNN layers
batch_first=True, # input & output 会是以 batch size 为第一维度的特征集 e.g. (batch, time_step, input_size)
)
self.out = nn.Linear(32, 1)
def forward(self, x, h_state): # 因为 hidden state 是连续的, 所以我们要一直传递这一个 state
# x (batch, time_step, input_size)
# h_state (n_layers, batch, hidden_size)
# r_out (batch, time_step, output_size)
r_out, h_state = self.rnn(x, h_state) # h_state 也要作为 RNN 的一个输入
outs = [] # 保存所有时间点的预测值
for time_step in range(r_out.size(1)): # 对每一个时间点计算 output
outs.append(self.out(r_out[:, time_step, :]))
return torch.stack(outs, dim=1), h_state
rnn = RNN()
print(rnn)
"""
RNN (
(rnn): RNN(1, 32, batch_first=True)
(out): Linear (32 -> 1)
)
"""
其实熟悉 RNN 的朋友应该知道, forward 过程中的对每个时间点求输出还有一招使得计算量比较小的. 不过上面的内容主要是为了呈现 PyTorch 在动态构图上的优势, 所以我用了一个 for loop 来搭建那套输出系统. 下面介绍一个替换方式. 使用 reshape 的方式整批计算.
def forward(self, x, h_state):
r_out, h_state = self.rnn(x, h_state)
r_out = r_out.view(-1, 32)
outs = self.out(r_out)
return outs.view(-1, 32, TIME_STEP), h_state
训练
我们使用 x 作为输入的 sin 值, 然后 y 作为想要拟合的输出, cos 值. 因为他们两条曲线是存在某种关系的, 所以我们就能用 sin 来预测 cos. rnn 会理解他们的关系, 并用里面的参数分析出来这个时刻 sin 曲线上的点如何对应上 cos 曲线上的点.
optimizer = torch.optim.Adam(rnn.parameters(), lr=LR) # optimize all rnn parameters
loss_func = nn.MSELoss()
h_state = None # 要使用初始 hidden state, 可以设成 None
for step in range(100):
start, end = step * np.pi, (step+1)*np.pi # time steps
# sin 预测 cos
steps = np.linspace(start, end, 10, dtype=np.float32)
x_np = np.sin(steps) # float32 for converting torch FloatTensor
y_np = np.cos(steps)
x = torch.from_numpy(x_np[np.newaxis, :, np.newaxis]) # shape (batch, time_step, input_size)
y = torch.from_numpy(y_np[np.newaxis, :, np.newaxis])
prediction, h_state = rnn(x, h_state) # rnn 对于每个 step 的 prediction, 还有最后一个 step 的 h_state
# !! 下一步十分重要 !!
h_state = h_state.data # 要把 h_state 重新包装一下才能放入下一个 iteration, 不然会报错
loss = loss_func(prediction, y) # cross entropy loss
optimizer.zero_grad() # clear gradients for this training step
loss.backward() # backpropagation, compute gradients
optimizer.step() # apply gradients
什么是自编码器 (AutoEncoder)
自编码是一种神经网络的形式.是一种非监督形式的学习。
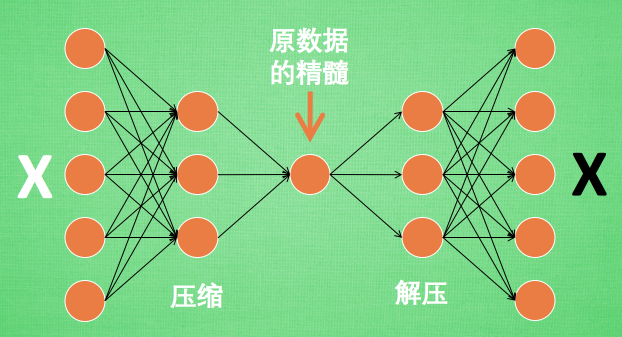
有一个神经网络, 它在做的事情是 接收一张图片, 然后 给它打码, 最后 再从打码后的图片中还原. 太抽象啦? 行, 我们再具体点。
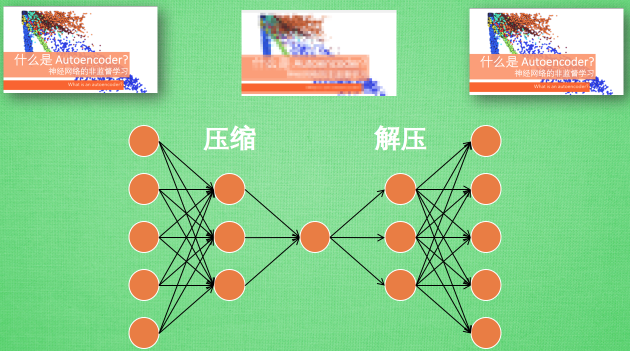
假设刚刚那个神经网络是这样, 对应上刚刚的图片, 可以看出图片其实是经过了压缩,再解压的这一道工序. 当压缩的时候, 原有的图片质量被缩减, 解压时用信息量小却包含了所有关键信息的文件恢复出原本的图片. 为什么要这样做呢?
原来有时神经网络要接受大量的输入信息, 比如输入信息是高清图片时, 输入信息量可能达到上千万, 让神经网络直接从上千万个信息源中学习是一件很吃力的工作. 所以, 何不压缩一下, 提取出原图片中的最具代表性的信息, 缩减输入信息量, 再把缩减过后的信息放进神经网络学习. 这样学习起来就简单轻松了. 所以, 自编码就能在这时发挥作用.
通过将原数据白色的X 压缩, 解压 成黑色的X, 然后通过对比黑白 X ,求出预测误差, 进行反向传递, 逐步提升自编码的准确性. 训练好的自编码中间这一部分就是能总结原数据的精髓.
可以看出, 从头到尾, 我们只用到了输入数据 X, 并没有用到 X 对应的数据标签, 所以也可以说自编码是一种非监督学习. 到了真正使用自编码的时候. 通常只会用到自编码前半部分.
编码器 Encoder
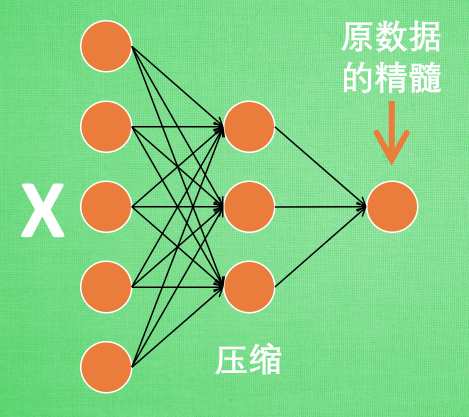
编码器能得到原数据的精髓, 然后我们只需要再创建一个小的神经网络学习这个精髓的数据,不仅减少了神经网络的负担, 而且同样能达到很好的效果.
如果你了解 PCA 主成分分析, 再提取主要特征时, 自编码和它一样,甚至超越了 PCA. 换句话说, 自编码 可以像 PCA 一样 给特征属性降维.
解码器 Decoder
至于解码器 Decoder, 我们也能那它来做点事情. 我们知道, 解码器在训练的时候是要将精髓信息解压成原始信息, 那么这就提供了一个解压器的作用, 甚至我们可以认为是一个生成器 (类似于GAN). 那做这件事的一种特殊自编码叫做 variational autoencoders,
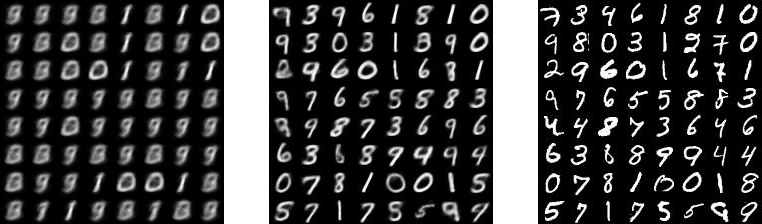
有一个例子就是让它能模仿并生成手写数字.
AutoEncoder in PyTorch
这次我们还用 MNIST 手写数字数据来压缩再解压图片.然后用压缩的特征进行非监督分类.
训练数据
自编码只用训练集就好了, 而且只需要训练 training data 的 image, 不用训练 labels.
import torch
import torch.nn as nn
import torch.utils.data as Data
import torchvision
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
from matplotlib import cm
import numpy as np
# torch.manual_seed(1) # reproducible
# Hyper Parameters
EPOCH = 10
BATCH_SIZE = 64
LR = 0.005 # learning rate
DOWNLOAD_MNIST = False
N_TEST_IMG = 5
# Mnist digits dataset
train_data = torchvision.datasets.MNIST(
root='./mnist/',
train=True, # this is training data
transform=torchvision.transforms.ToTensor(), # Converts a PIL.Image or numpy.ndarray to
# torch.FloatTensor of shape (C x H x W) and normalize in the range [0.0, 1.0]
download=DOWNLOAD_MNIST, # download it if you don't have it
)
AutoEncoder
AutoEncoder 形式很简单, 分别是 encoder 和 decoder, 压缩和解压, 压缩后得到压缩的特征值, 再从压缩的特征值解压成原图片.
class AutoEncoder(nn.Module):
def __init__(self):
super(AutoEncoder, self).__init__()
# 压缩
self.encoder = nn.Sequential(
nn.Linear(28*28, 128),
nn.Tanh(),
nn.Linear(128, 64),
nn.Tanh(),
nn.Linear(64, 12),
nn.Tanh(),
nn.Linear(12, 3), # 压缩成3个特征, 进行 3D 图像可视化
)
# 解压
self.decoder = nn.Sequential(
nn.Linear(3, 12),
nn.Tanh(),
nn.Linear(12, 64),
nn.Tanh(),
nn.Linear(64, 128),
nn.Tanh(),
nn.Linear(128, 28*28),
nn.Sigmoid(), # 激励函数让输出值在 (0, 1)
)
def forward(self, x):
encoded = self.encoder(x)
decoded = self.decoder(encoded)
return encoded, decoded
autoencoder = AutoEncoder()
训练
训练, 并可视化训练的过程. 我们可以有效的利用 encoder 和 decoder 来做很多事, 比如这里我们用 decoder 的信息输出看和原图片的对比, 还能用 encoder 来看经过压缩后, 神经网络对原图片的理解. encoder 能将不同图片数据大概的分离开来. 这样就是一个无监督学习的过程.
optimizer = torch.optim.Adam(autoencoder.parameters(), lr=LR)
loss_func = nn.MSELoss()
for epoch in range(EPOCH):
for step, (x, b_label) in enumerate(train_loader):
b_x = x.view(-1, 28*28) # batch x, shape (batch, 28*28)
b_y = x.view(-1, 28*28) # batch y, shape (batch, 28*28)
encoded, decoded = autoencoder(b_x)
loss = loss_func(decoded, b_y) # mean square error
optimizer.zero_grad() # clear gradients for this training step
loss.backward() # backpropagation, compute gradients
optimizer.step() # apply gradients
可以使用encoder得到的3维Tensor来画一个3D图,表明AutoEncoder的降维功能。
什么是生成对抗网络
GAN, 又称生成对抗网络, 也是 Generative Adversarial Nets 的简称.
常见神经网络形式
神经网络分很多种, 有普通的前向传播神经网络 , 有分析图片的 CNN 卷积神经网络 , 有分析序列化数据, 比如语音的 RNN 循环神经网络 , 这些神经网络都是用来输入数据, 得到想要的结果, 我们看中的是这些神经网络能很好的将数据与结果通过某种关系联系起来.
但是还有另外一种形式的神经网络, 他不是用来把数据对应上结果的, 而是用来”凭空”捏造结果, 这就是我们要说的生成网络啦. GAN 就是其中的一种形式. 那么 GAN 是怎么做到的呢? 当然这里的”凭空”并不是什么都没有的空盒子, 而是一些随机数.
我们就是用没有意义的随机数来生成有有意义的作品, 比如著名画作. 当然, 这还不是全部, 这只是一个 GAN 的一部分而已, 这一部分的神经网络我们可以想象成是一个新手画家.
GAN的通俗解释
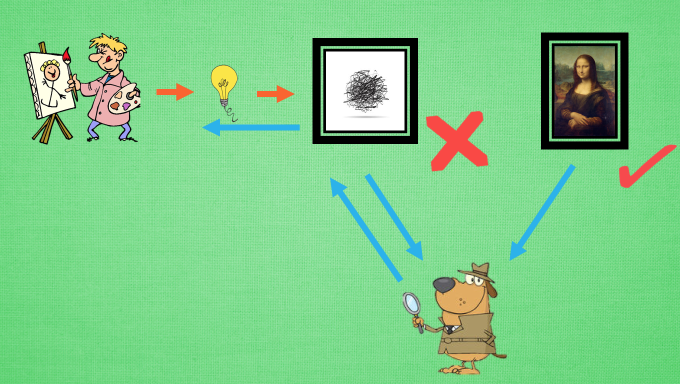
新手画家用随机灵感画画 , 新手鉴赏家会接收一些画作, 但是他不知道这是新手画家画的还是著名画家画的, 他说出他的判断, 你来纠正他的判断, 新手鉴赏家一边学如何判断, 一边告诉新手画家要怎么画才能画得更像著名画家, 新手画家就能学习到如何从自己的灵感画出更像著名画家的画了. GAN 也就这么回事.
GAN网络

Generator 会根据随机数来生成有意义的数据 , Discriminator 会学习如何判断哪些是真实数据 , 哪些是生成数据, 然后将学习的经验反向传递给 Generator, 让 Generator 能根据随机数生成更像真实数据的数据. 这样训练出来的 Generator 可以有很多用途, 比如最近有人就拿它来生成各种卧室的图片.
GAN in PyTorch
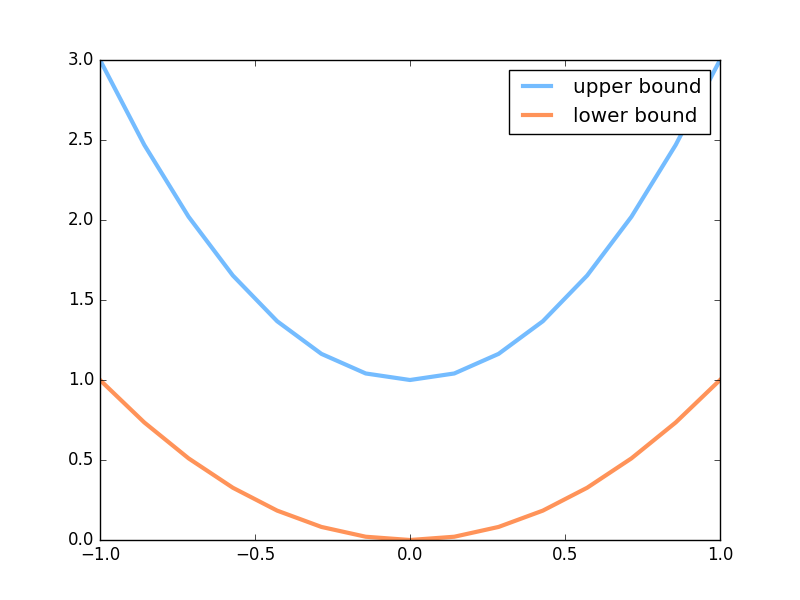
下面是本节内容的效果, 绿线的变化是新手画家慢慢学习如何踏上画家之路的过程. 而能被认定为著名的画作在 upper bound 和 lower bound 之间.
这里的著名画作是一元二次曲线,介于upper和lower之间。新手开始随机生成曲线,后面经过GAN之后生成的曲线会慢慢像标准的一元二次曲线。
超参数设置
新手画家 (Generator) 在作画的时候需要有一些灵感 (random noise), 我们这些灵感的个数定义为 N_IDEAS. 而一幅画需要有一些规格, 我们将这幅画的画笔数定义一下, N_COMPONENTS 就是一条一元二次曲线(这幅画画)上的点个数. 为了进行批训练, 我们将一整批话的点都规定一下(PAINT_POINTS).
import torch
import torch.nn as nn
import numpy as np
import matplotlib.pyplot as plt
torch.manual_seed(1) # reproducible
np.random.seed(1)
# 超参数
BATCH_SIZE = 64
LR_G = 0.0001 # learning rate for generator
LR_D = 0.0001 # learning rate for discriminator
N_IDEAS = 5 # think of this as number of ideas for generating an art work (Generator)
ART_COMPONENTS = 15 # it could be total point G can draw in the canvas
PAINT_POINTS = np.vstack([np.linspace(-1, 1, ART_COMPONENTS) for _ in range(BATCH_SIZE)])
著名画家的画
我们需要有很多画是来自著名画家的(real data), 将这些著名画家的画, 和新手画家的画都传给新手鉴赏家, 让鉴赏家来区分哪些是著名画家, 哪些是新手画家的画. 如何区分我们在后面呈现. 这里我们生成一些著名画家的画 (batch 条不同的一元二次方程曲线).
def artist_works(): # painting from the famous artist (real target)
a = np.random.uniform(1, 2, size=BATCH_SIZE)[:, np.newaxis]
paintings = a * np.power(PAINT_POINTS, 2) + (a-1)
paintings = torch.from_numpy(paintings).float()
return paintings
下面就是会产生曲线的一个上限和下限.
神经网络
这里会创建两个神经网络, 分别是 Generator (新手画家), Discriminator(新手鉴赏家). G 会拿着自己的一些灵感当做输入, 输出一元二次曲线上的点 (G 的画).
D 会接收一幅画作 (一元二次曲线), 输出这幅画作到底是不是著名画家的画(是著名画家的画的概率).
G = nn.Sequential( # Generator
nn.Linear(N_IDEAS, 128), # random ideas (could from normal distribution)
nn.ReLU(),
nn.Linear(128, ART_COMPONENTS), # making a painting from these random ideas
)
D = nn.Sequential( # Discriminator
nn.Linear(ART_COMPONENTS, 128), # receive art work either from the famous artist or a newbie like G
nn.ReLU(),
nn.Linear(128, 1),
nn.Sigmoid(), # tell the probability that the art work is made by artist
)
训练
接着我们来同时训练 D 和 G. 训练之前, 我们来看看G作画的原理. G 首先会有些灵感, G_ideas 就会拿到这些随机灵感 (可以是正态分布的随机数), 然后 G 会根据这些灵感画画. 接着我们拿着著名画家的画和 G 的画, 让 D 来判定这两批画作是著名画家画的概率.
for step in range(10000):
artist_paintings = artist_works() # real painting from artist
G_ideas = torch.randn(BATCH_SIZE, N_IDEAS) # random ideas
G_paintings = G(G_ideas()) # fake painting from G (random ideas)
prob_artist0 = D(artist_paintings) # D try to increase this prob
prob_artist1 = D(G_paintings) # D try to reduce this prob
然后计算有多少来之画家的画猜对了, 有多少来自 G 的画猜对了, 我们想最大化这些猜对的次数. 这也就是 log(D(x)) + log(1-D(G(z)) 在论文中的形式. 而因为 torch 中提升参数的形式是最小化误差, 那我们把最大化 score 转换成最小化 loss, 在两个 score 的合的地方加一个符号就好. 而 G 的提升就是要减小 D 猜测 G 生成数据的正确率, 也就是减小 D_score1.
D_loss = - torch.mean(torch.log(prob_artist0) + torch.log(1. - prob_artist1))
G_loss = torch.mean(torch.log(1. - prob_artist1))
最后我们在根据 loss 提升神经网络就好了.
opt_D.zero_grad()
D_loss.backward(retain_graph=True) # retain_graph 这个参数是为了再次使用计算图纸
opt_D.step()
opt_G.zero_grad()
G_loss.backward()
opt_G.step()