最近在做立体视觉的东西,网上的资料多多少少总有那么些重复,总结一下,做个笔记吧,聊作参考。
其实不用四处找原理,找到一个系列,耐心读完,就会懂得七七八八,也知道自己还需要找的东西了。
1.图像坐标系
以图像左上角为原点建立以像素为单位的直接坐标系u-v。像素的横坐标u与纵坐标v分别是在其图像数组中所在的列数与所在行数。(在OpenCV中u对应x,v对应y)
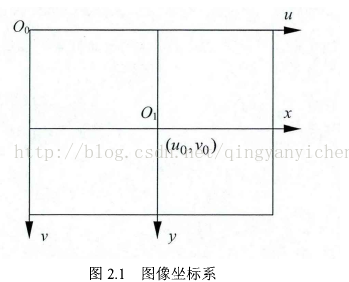
图像的物理坐标系x-y。将相机光轴与图像平面的交点(一般位于图像平面的中心处,也称为图像的主点(principalpoint)定义为该坐标系的原点O1,且x轴与u轴平行,y轴与v轴平行,假设(u0,v0)代表O1在u-v坐标系下的坐标,dx与dy分别表示每个像素在横轴x和纵轴y上的物理尺寸,则图像中的每个像素在u-v坐标系中的坐标和在x-y坐标系中的坐标之间都存在如下的关系:
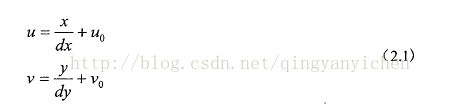
(上述公式中我们假设物理坐标系中的单位为毫米,那么dx的的单位为:毫米/像素。那么x/dx的单位就是像素了,即和u的单位一样都是像素)
可将上式用齐次坐标与矩阵形式表示为:


其逆关系可表示为:

2、相机坐标系
相机成像的几何关系可由图2.2表示。其中O点为摄像机光心(投影中心),Xc轴和Yc轴与成像平面坐标系的x轴和y轴平行,Zc轴为摄像机的光轴,和图像平面垂直。光轴与图像平面的交点为图像的主点O1,由点O与Xc, Yc, Zc轴组成的直角坐标系称为摄像机的坐标系。OO1为摄像机的焦距。
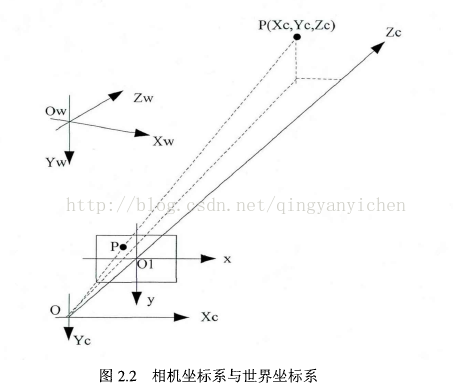
3.世界坐标系
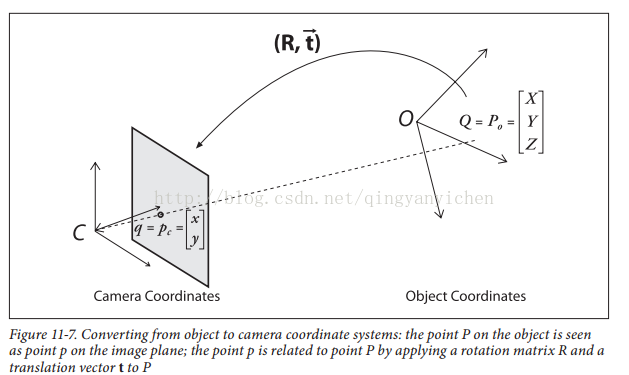
世界坐标系是为了描述相机的位置而被引入的,如图2.2中坐标系Ow Xw Yw Zw即为世界坐标系。平移向量t和旋转矩阵R可以用来表示相机坐标系与世界坐标系的关系。所以,假设空间点P在世界坐标系下的齐次坐标是(Xw,Yw,Zw,1)T,( T表示转置),在相机坐标下的齐次坐标是(Xc,Yc,Zc,1)T,则存在如下的关系:
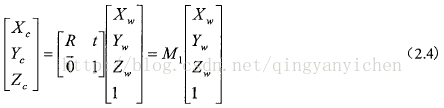
上式中R是3×3的正交单位矩阵(也成为旋转矩阵),t是三维的平移向量。矢量0=(0,0,0),M1是4×4矩阵。
通常在三维空间中,旋转可以分解为绕各自坐标轴的二维旋转(例如图11-8就是绕z轴旋转),其中旋转的轴线的度量保存不变(这就是为什么旋转矩阵为正交矩阵的缘由)。如果依次绕x, y, z轴旋转角度ψ,φ和θ,那么总的旋转矩阵R是三个矩阵Rx(ψ),Ry(φ), Rz(θ)的乘积,其中:
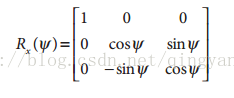
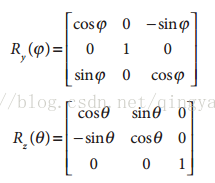
因此R=Rx(ψ)*Ry(φ)*Rz(θ).