版权声明:诺克萨斯万岁 https://blog.csdn.net/qq_38693598/article/details/87877300
目录
5.4 状态空间模型
5.4.1 概述
- 状态是系统动态信息的集合;
- 状态变量:在表征系统信息的所有变量中,能够全部描述系统运行/时域行为的最小数目的一组独立变量,其选取不唯一,状态变量个数=系统含有独立储能元件的个数=系统的阶数,一般取储能元件的状态量作为状态变量,状态初值与储能元件的初始状态相对应;
- 状态空间:由系统的n个状态变量x1(t), x2(t), …, xn(t)为坐标轴,构成的n维欧氏空间,称为n维状态空间;
- 状态矢量:引入状态空间后,可把n个状态变量用矢量形式表示出来,即状态空间是由所有状态矢量x组成的,系统的一个状态在状态空间中就是一个点;
- 状态轨线:系统状态矢量的端点在状态空间中所移动的路径,代表了状态随时间变化的规律;
- 状态方程:由系统状态变量构建的一阶微分方程组,能响应所有独立变量和初始条件;
- 状态空间模型:即系统运动轨迹;
5.4.2状态空间模型函数
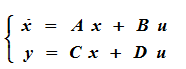
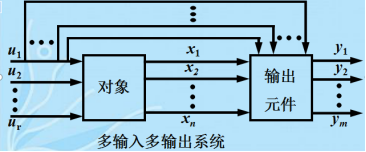
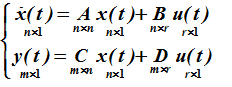
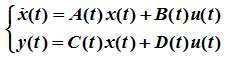
对于一般的n阶线性定常系统(n个状态,r个输入,m个输出)
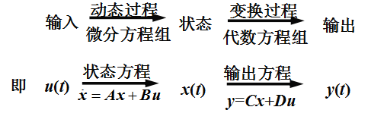
控制过程:
结构图:


| 系统分类 |
系统状态空间模型 |
|
| 线性定常系统 |
|
一阶微分方程组 代数方程 |
| 系统的完整描述必须具有两部分内容,前者刻画出系统运动的内部(状态x)过程,后者则表达系统内部(状态x)运动与外部(输出y)的联系 |
||
| 线性时变系统 |
|
|
| 区别:矩阵是时间t的函数(变系数微分方程) |
||
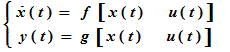
| 非线性定常系统 |
参考非线性定义理解与线性定常系统区别 |
|
| 非线性时变系统 |
|
|
5.4.3 模型建立(MATLAB)
| 线性定常系统一般表达式 |
|
|
| MATLAB中 |
sys=ss(A,B,C,D);%建立连续系统状态空间模型 sys=ss(G,H,C,D,Ts);%建立采样周期Ts离散系统状态空间模型 |
|
| [A,B,C,D]=tf2ss(num,den);%将传递函数转化为状态方程sys=ss(A,B,C,D); |
||