5 控制系统
状态x,输入u,输出y
5.1 数学模型
- 5.1.1 分类
数学模型是定量地描述系统的动态性能,揭示系统的结构、参数与动态性能之间的数学表达式。
| 数学模型 | 一般形式 |
|---|---|
| 微分方程:物理定律及实验规律,是列写传递函数和状态空间方程的基础 | 单输入=单输出 |
| 传递函数:经典控制理论 | G(s)=输出量拉氏变化/输入量拉氏变换 |
| 状态方程:现代控制理论 | 一阶微分方程组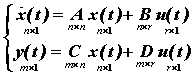 |
- 5.1.2 模型/线性/微分/动态/自治
-
系统数学模型 描述系统输入/输出变量以及各变量之间关系的数学表达式 动态模型 描述系统处于暂态过程中各个变量之间关系的表达式,一般为时间函数,如微分方程、传递函数、状态方程 微分方程 含有自变量、未知函数和未知函数的导数的方程 线性方程 在代数方程中,仅含未知数的一次幂的方程, 线性微分方程 微分方程中未知函数及其各阶导数仅一次幂,即只能出现函数本身、函数的任何阶次的导函数; 函数本身跟所有的导函数之间除了加减之外,不可以有任何运算,如y*y’; 函数本身跟本身、各阶导函数本身跟本身,都不可以有任何加减之外的运算,如y*y,y’2; 不允许对函数本身、各阶导函数做任何形式的复合运算,例如:siny、cosy、tany、lny、lgx、y²、y³ 动态微分方程 描述输入量(给定量/扰动量)微小变化下系统运动状态/输出量(被控制量)的增量方程 自治系统 动力系统系统由一组常微分方程组成,并且这些方程的表达式与动力系统的自变量无关; 在线性系统中,自治系统常指不受外部影响即没有输入作用的一类动态系统; 在有关物理的动力系统中,自变量通常是时间。这时自治系统通常表示其中的物理规律不随时间变化的系统,也就是说空间中每一点的性质在过去、现在和将来都是一样的; 理论上所有的动力系统都可以转化为自治系统; 非自治系统 系统模型函数中含有自变量如t,非自治; dx/dt = f(x) 不含t,就是自治;dx/dt = f(x,t)是非自治的;