目录
0. 前言
注意:本篇文章与上一篇 Matlab动态PID仿真及PID知识梳理 最后一个simulink仿真紧密相连,有必要的话大家可以去看看。
更新2022.7.24:新增仿真实验模型分享: Simulink仿真文件
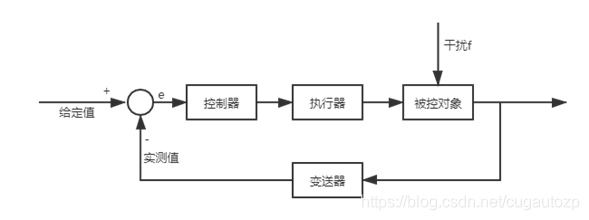
1. 简单控制系统介绍
简单控制系统又称单回路负反馈控制系统,是指由1个控制(调节)器、1个测量元件及变送器、1个执行器(调节阀)、1个调节对象(被控过程)组成的单回路闭环负反馈控制系统。控制系统框图如图所示
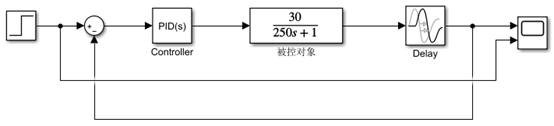
2. 实验模型设计
控制器: G c ( s ) = K p + K i s + K d s {G_c}\left( s \right) = {K_p} + \frac{ { {K_i}}}{s} + {K_d}s Gc(s)=Kp+sKi+Kds
执行器: G v ( s ) = 30 {G_v}\left( s \right) = 30 Gv(s)=30
被控对象: G 0 ( s ) = 1 250 s + 1 e − 20 s {G_0}\left( s \right) = \frac{1}{ {2{\rm{50}}s{\rm{ + 1}}}}{e^{ - 20s}} G0(s)=250s+11e−20s
测量变送器: G m ( s ) = 1 {G_m}\left( s \right) = 1 Gm(s)=1
系统开环传递函数为: G ( s ) = G c ( s ) 30 250 s + 1 e − 20 s G\left( s \right) = {G_c}\left( s \right)\frac{ {30}}{ {2{\rm{50}}s{\rm{ + 1}}}}{e^{ - 20s}} G(s)=Gc(s)250s+130e−20s
2.1 Simulink 仿真模型
- 闭环时被控对象阶跃响应
简单系统仿真simulink仿真模型如下图所示
- 测试对比仿真模型搭建
为了更直观的观察 P , P I , P D , P I D P,PI,PD,PID P,PI,PD,PID 四种控制效果,构建对比仿真simulink模型如下图所示

2.2 比例控制(P)仿真分析
- 上述模型中输入值为100,这里先使用比例调节(P)设定 K p = 0.4 , 0.1 , 0.8 ; K i = K d = 0 {K_p} = 0.4\;,\;0.1,\;0.8\;;\;{K_i} = {K_d} = 0 Kp=0.4,0.1,0.8;Ki=Kd=0 ,可以看到结果如图所示,kp=0.1时无超调量但存在静差,随着kp的增大静差减小,超调量增大,若kp过大会出现振荡。
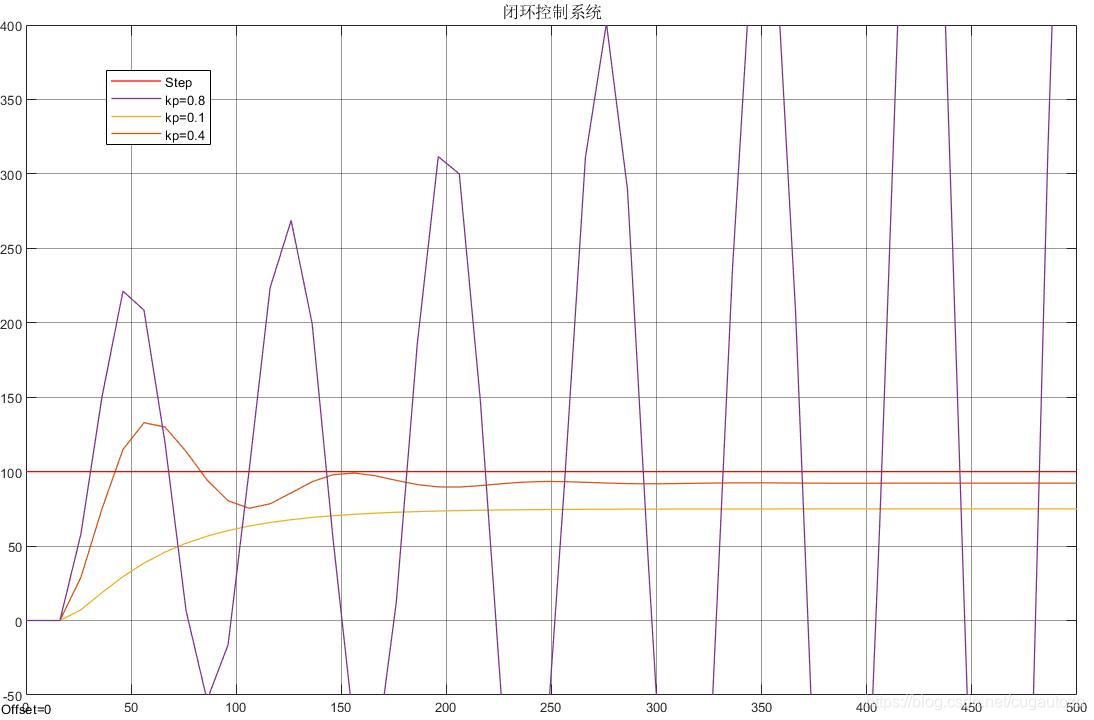
- 总结比例控制特点:
有差调节、连续调节,控制及时、适当。控制系统必然存在静差,随比例度的增大而增大。减小比例度可以减小静差,但会使系统稳定性下降。
2.3 比例积分控制(PI)仿真分析
- 在实际的定高的情况下是需要精确定高的,需要消除静差,也就需要增加积分控制I,也就这里需要采取PI控制,加不加微分(D)控制看需求。这里在上述 K P = 0.2 {K_P} = 0.2 KP=0.2 参数调节的情况下选择 ,取如下三种 K i = 0.001 , 0.005 , 0.01 {K_i} = 0.001,0.005,0.01 Ki=0.001,0.005,0.01 如图所示可以看到当 K i {K_i} Ki 过大时出现了等幅振荡,当选取到合适的 时,可以看到静差消除。
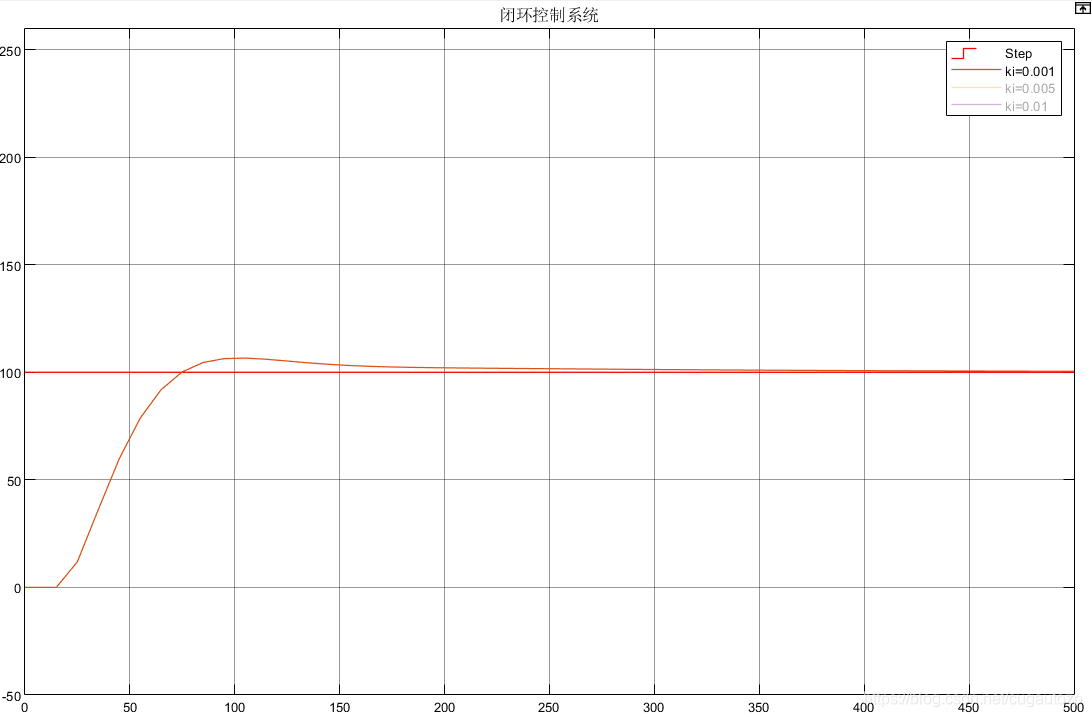



- 总结比例积分(PI)特点:
从时域上看,只要存在偏差,积分就会不停对偏差积累,因此稳态时误差一定为零;比例与积分动作都是对过去控制误差进行操作, 不对未来控制误差进行预测,限制了控制性能。
2.4 比例微分控制(PD)仿真分析
- 单独对比一下 P D PD PD 控制效果,看其对未来控制误差进行预测。这里还是利用 K p = 0.2 {K_p} = 0.2 Kp=0.2 ,而这里的微分方程改为实际式子加入惯性环节, D N s s + N D\frac{
{Ns}}{
{s + N}} Ds+NNs 这里 N N N 取 1 1 1 , K d = 0.5 , 1 , 1.5 {K_d} = 0.5,1,1.5 Kd=0.5,1,1.5 ,如图所示。可以看到 越大响应速度越快具有超前预测,当选取合适的 Kd可以看到达到平稳时响应时间短,系统平稳
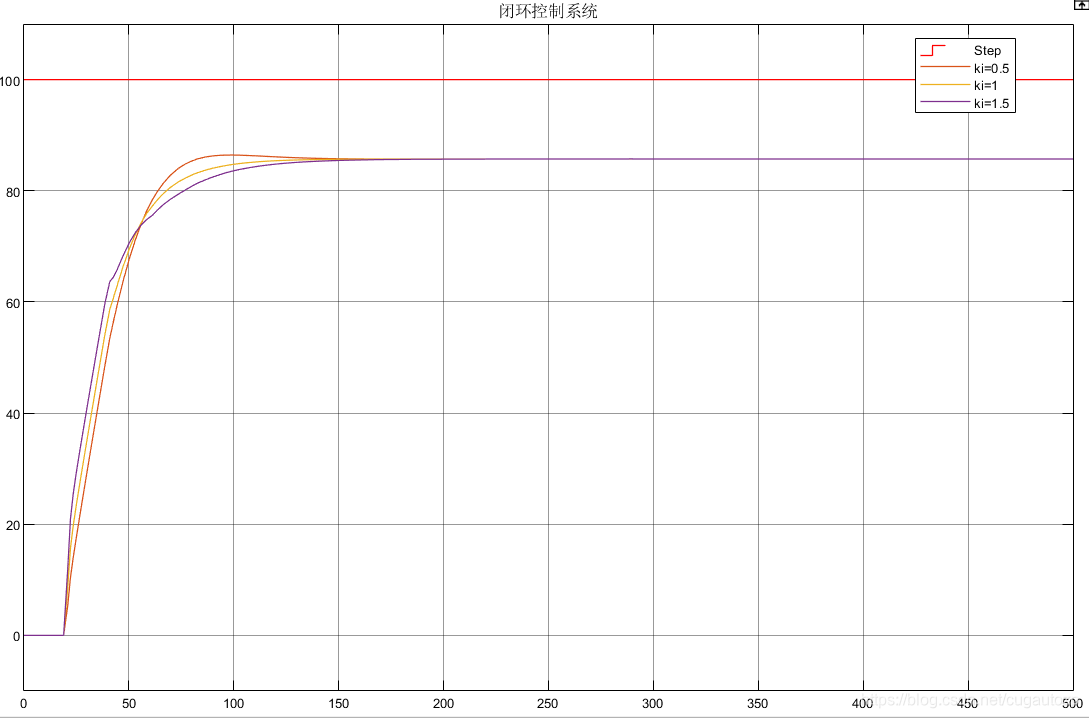
- 总结PD控制特点
比例控制对于惯性较大对象,控制过程缓慢,控制品质不佳。比例微分控制可提高控制速度,对惯性较大对象,可改善控制质量,减小偏差,缩短控制时间。PD调节具有提高系统稳定性、抑制过渡过程最大动态偏差的作用。
2.5比例积分微分控制(PID)仿真分析
- 看到上述 P I PI PI 控制系统响应,观察到其虽然消除了系统响应误差,但是系统响应速度非常慢,为了提高系统稳定情况下还能提高系统响应速度,在 P I PI PI 的基础上引入微分控制形成常见 P I D PID PID 控制,在上述 K p = 0.2 , K i = 0.0008 K_p=0.2,K_i=0.0008 Kp=0.2,Ki=0.0008情况下 N N N 取 1 1 1, K d = 1.8 , 3 , 0 K_d=1.8,3,0 Kd=1.8,3,0 。可以看到当取到合适的 K d K_d Kd 时可以使系统响应速度加快,系统更稳定。
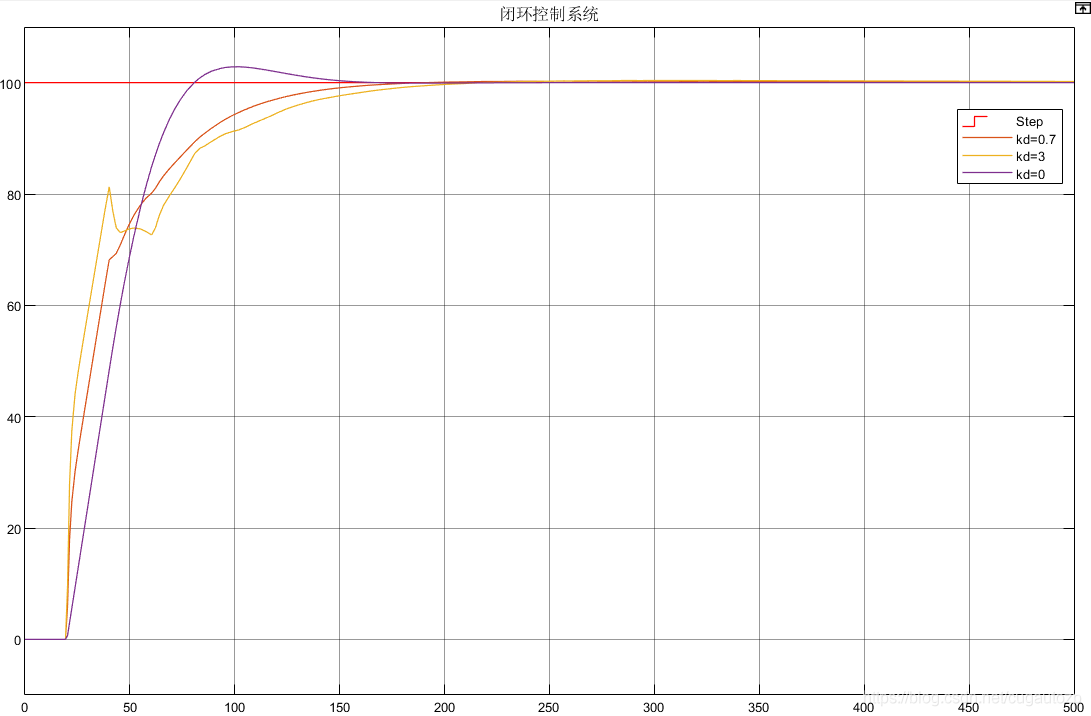
- PID控制特点总结
将比例、积分、微分三种调节规律结合在一起, 只要三项作用的强度配合适当,既能快速调节,又能消除余差,可得到满意的控制效果。
3 开环系统实验
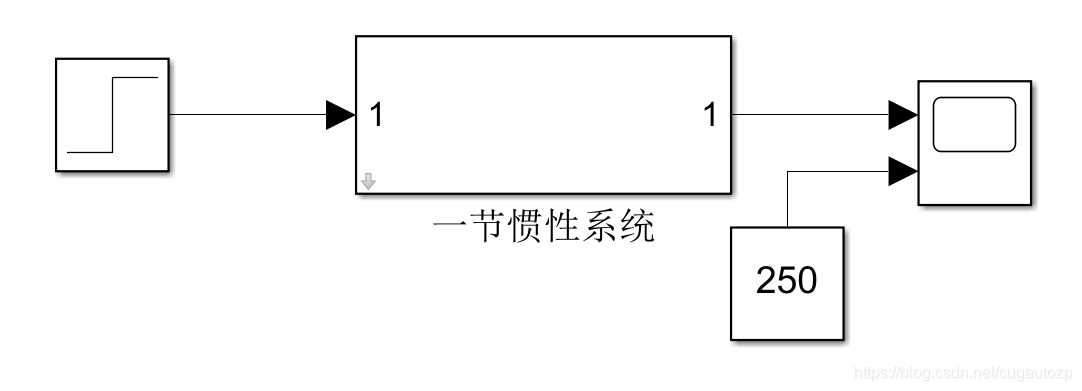
3.1 一节惯性环节
一阶惯性环节微分方程: T d c ( t ) d t + c ( t ) = r ( t ) T\frac{
{dc\left( t \right)}}{
{dt}} + c\left( t \right) = r\left( t \right) Tdtdc(t)+c(t)=r(t)
传递函数: T s c ( s ) − T c ( 0 ) + c ( s ) = r ( s ) ⇒ c ( s ) = 1 T s + 1 r ( s ) + T c ( 0 ) T s + 1 Tsc\left( s \right) - Tc\left( 0 \right) + c\left( s \right) = r\left( s \right) \Rightarrow c\left( s \right) = \frac{1}{
{Ts + 1}}r\left( s \right) + \frac{
{Tc\left( 0 \right)}}{
{Ts + 1}} Tsc(s)−Tc(0)+c(s)=r(s)⇒c(s)=Ts+11r(s)+Ts+1Tc(0)
这里 r ( t ) r(t) r(t) 为阶跃响应 r ( s ) = 250 s r\left( s \right) = \frac{
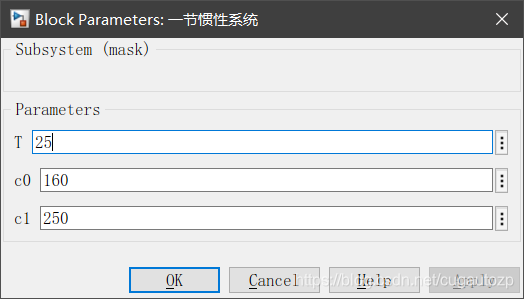
{250}}{s} r(s)=s250 ,假设系统初始值为c(0)=160,T=25,由终值定理可以得出为250,即系统传递函数为 c ( s ) = 160 s + 10 s ( s + 1 25 ) = 250 − 90 e − t T c\left( s \right) = \frac{
{160s + 10}}{
{s\left( {s + \frac{
{\rm{1}}}{
{
{\rm{25}}}}} \right)}} = 250 - 90{e^{ - \frac{t}{T}}} c(s)=s(s+251)160s+10=250−90e−Tt
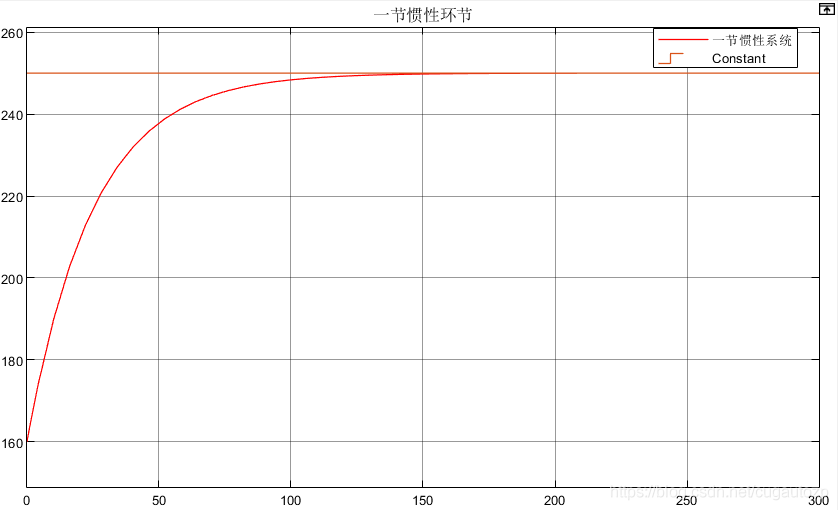
一阶惯性环节simulink仿真模块及仿真结果如图所示,可以看到仿真值在不断靠近终值但就是不等于。

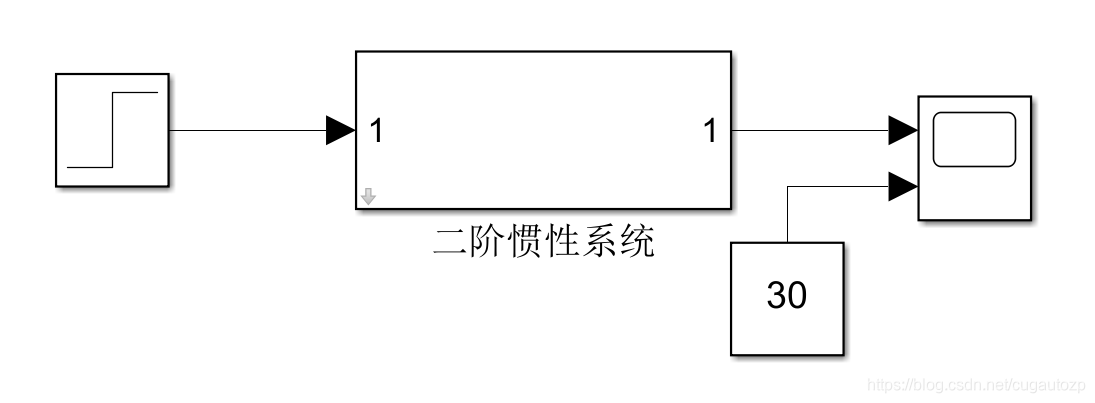
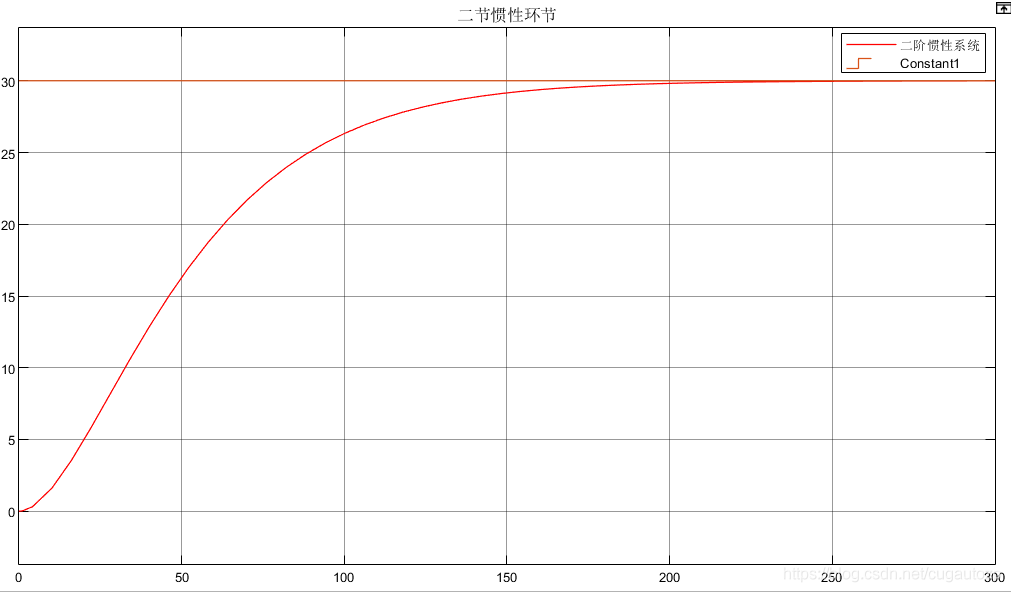
3.2 二节惯性环节
传递函数: W ( s ) = K ( T 1 s + 1 ) ( T 2 s + 1 ) W\left( s \right) = \frac{K}{
{\left( {
{T_1}s + 1} \right)\left( {
{T_2}s + 1} \right)}} W(s)=(T1s+1)(T2s+1)K
这里设置 T 1 = 25 , T 2 = 2 , K = 30 T_1=25,T_2=2,K=30 T1=25,T2=2,K=30 , r ( s ) = 30 s r(s) = \frac{
{30}}{s} r(s)=s30
即二阶惯性环节为: W ( s ) = 30 ( 25 s + 1 ) ( 30 s + 1 ) W\left( s \right) = \frac{
{30}}{
{\left( {25s + 1} \right)\left( {30s + 1} \right)}} W(s)=(25s+1)(30s+1)30
Simulink仿真模块,仿真结果图如图所示

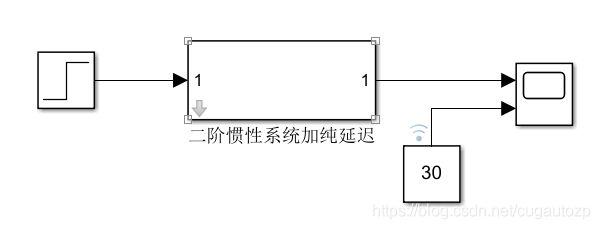
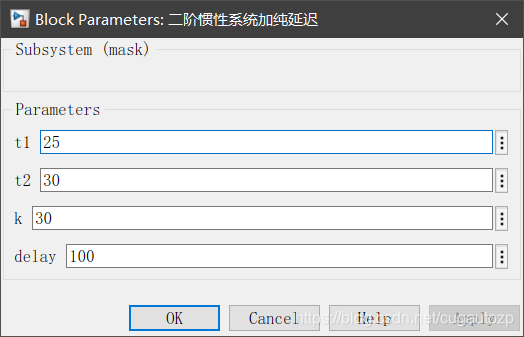
3.3 二节惯性环节与纯延迟系统
在上述的二阶惯性环节上加一个纯延迟环节即可
这里纯延迟为 e − 100 s {e^{ - 100s}} e−100s,系统传递函数为 W ( s ) = 30 ( 25 s + 1 ) ( 30 s + 1 ) e − 100 s W\left( s \right) = \frac{
{30}}{
{\left( {25s + 1} \right)\left( {30s + 1} \right)}}{e^{ - 100s}} W(s)=(25s+1)(30s+1)30e−100s
Simulink仿真模块,仿真结果如图所示,延迟100s后开始响应,并且响应曲线也成s形增长