无人驾驶,PID 控制,代码示例
PID(proportion integration differentiation)其实就是指比例,积分,微分控制。其在无人驾驶控制上具有很广的应用,下面将通过代码逐一展示他们在无人车转向角控制上的作用。
1. Propotion 比例。此时只加入P来控制,看看其如何实现,以及效果如何。
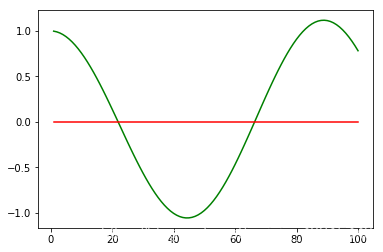
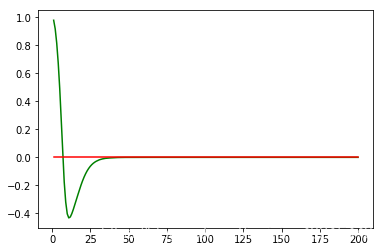
如下图所示,(0,1)为无人车起始位置,目标为红色规划线路。所以在需要调整转向角,将汽车靠近目标路线。而这个转向角steer需要调整多少了,就要根据偏差cte(crosstrack_error,即与与目标的y向距离)而来了。即steer = -tau * cte,其中tau为比例因子。
从实现效果来看,无人车实际路线(绿色线)在目标路线上线徘徊,扭来扭曲并不理想,所以光靠Propotion并不行。
# -----------
# User Instructions
#
# Implement a P controller by running 100 iterations
# of robot motion. The desired trajectory for the
# robot is the x-axis. The steering angle should be set
# by the parameter tau so that:
#
# steering = -tau * crosstrack_error
#
# You'll only need to modify the `run` function at the bottom.
# ------------
import random
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
# ------------------------------------------------
#
# this is the Robot class
#
class Robot(object):
def __init__(self, length=20.0):
"""
Creates robot and initializes location/orientation to 0, 0, 0.
"""
self.x = 0.0
self.y = 0.0
self.orientation = 0.0
self.length = length
self.steering_noise = 0.0
self.distance_noise = 0.0
self.steering_drift = 0.0
def set(self, x, y, orientation):
"""
Sets a robot coordinate.
"""
self.x = x
self.y = y
self.orientation = orientation % (2.0 * np.pi)
def set_noise(self, steering_noise, distance_noise):
"""
Sets the noise parameters.
"""
# makes it possible to change the noise parameters
# this is often useful in particle filters
self.steering_noise = steering_noise
self.distance_noise = distance_noise
def set_steering_drift(self, drift):
"""
Sets the systematical steering drift parameter
"""
self.steering_drift = drift
def move(self, steering, distance, tolerance=0.001, max_steering_angle=np.pi / 4.0):
"""
steering = front wheel steering angle, limited by max_steering_angle
distance = total distance driven, most be non-negative
"""
if steering > max_steering_angle:
steering = max_steering_angle
if steering < -max_steering_angle:
steering = -max_steering_angle
if distance < 0.0:
distance = 0.0
# apply noise
steering2 = random.gauss(steering, self.steering_noise)
distance2 = random.gauss(distance, self.distance_noise)
# apply steering drift
steering2 += self.steering_drift
# Execute motion
turn = np.tan(steering2) * distance2 / self.length
if abs(turn) < tolerance:
# approximate by straight line motion
self.x += distance2 * np.cos(self.orientation)
self.y += distance2 * np.sin(self.orientation)
self.orientation = (self.orientation + turn) % (2.0 * np.pi)
else:
# approximate bicycle model for motion
radius = distance2 / turn
cx = self.x - (np.sin(self.orientation) * radius)
cy = self.y + (np.cos(self.orientation) * radius)
self.orientation = (self.orientation + turn) % (2.0 * np.pi)
self.x = cx + (np.sin(self.orientation) * radius)
self.y = cy - (np.cos(self.orientation) * radius)
def __repr__(self):
return '[x=%.5f y=%.5f orient=%.5f]' % (self.x, self.y, self.orientation)
############## ADD / MODIFY CODE BELOW ####################
# ------------------------------------------------------------------------
#
# run - does a single control run
robot = Robot()
robot.set(0, 1, 0)
def run(robot, tau, n=100, speed=1.0):
x_trajectory = []
y_trajectory = []
# TODO: your code here
for i in range(n):
cte = robot.y
steer = -tau * cte
robot.move(steer, speed)
x_trajectory.append(robot.x)
y_trajectory.append(robot.y)
return x_trajectory, y_trajectory
x_trajectory, y_trajectory = run(robot, 0.1)
n = len(x_trajectory)
plt.plot(x_trajectory, y_trajectory, 'g', label='P controller')
plt.plot(x_trajectory, np.zeros(n), 'r', label='reference')[<matplotlib.lines.Line2D at 0x224302245c0>]
2. 加入 Differentiation 微分,变成PD控制。
propotion比例只关注与目标路线y向误差,致力于急速将拉近与目标之间的距离。结果到达目标之后,车头方向orientation = steer1 + steer2 + …+steer100,快垂直于目标路线了,所以无人车到达目标之后,转向角一时半会调不回来,会跑过头。
Differentiation 微分主要关注误差cte的变化,也就是误差改变的速度,diff_cte = cte(t) - cte(t-1)。
此时转向角调整就变成了steer = -tau_p * cte - tau_d * diff_cte,直观的理解就是当车径直朝向目标路线冲过来的时候,适当收一收转向角,使得转向角朝目标方向调整的速度小一点。这样一来就避免了,到达目标位置时车头方向于目标路线方向角度太大而冲过头。从下图可以看出,冲过头的现象得到明显的改善。
import random
import numpy as np
import matplotlib.pyplot as plt
# ------------------------------------------------
#
# this is the Robot class
#
class Robot(object):
def __init__(self, length=20.0):
"""
Creates robot and initializes location/orientation to 0, 0, 0.
"""
self.x = 0.0
self.y = 0.0
self.orientation = 0.0
self.length = length
self.steering_noise = 0.0
self.distance_noise = 0.0
self.steering_drift = 0.0
def set(self, x, y, orientation):
"""
Sets a robot coordinate.
"""
self.x = x
self.y = y
self.orientation = orientation % (2.0 * np.pi)
def set_noise(self, steering_noise, distance_noise):
"""
Sets the noise parameters.
"""
# makes it possible to change the noise parameters
# this is often useful in particle filters
self.steering_noise = steering_noise
self.distance_noise = distance_noise
def set_steering_drift(self, drift):
"""
Sets the systematical steering drift parameter
"""
self.steering_drift = drift
def move(self, steering, distance, tolerance=0.001, max_steering_angle=np.pi / 4.0):
"""
steering = front wheel steering angle, limited by max_steering_angle
distance = total distance driven, most be non-negative
"""
if steering > max_steering_angle:
steering = max_steering_angle
if steering < -max_steering_angle:
steering = -max_steering_angle
if distance < 0.0:
distance = 0.0
# apply noise
steering2 = random.gauss(steering, self.steering_noise)
distance2 = random.gauss(distance, self.distance_noise)
# apply steering drift
steering2 += self.steering_drift
# Execute motion
turn = np.tan(steering2) * distance2 / self.length
if abs(turn) < tolerance:
# approximate by straight line motion
self.x += distance2 * np.cos(self.orientation)
self.y += distance2 * np.sin(self.orientation)
self.orientation = (self.orientation + turn) % (2.0 * np.pi)
else:
# approximate bicycle model for motion
radius = distance2 / turn
cx = self.x - (np.sin(self.orientation) * radius)
cy = self.y + (np.cos(self.orientation) * radius)
self.orientation = (self.orientation + turn) % (2.0 * np.pi)
self.x = cx + (np.sin(self.orientation) * radius)
self.y = cy - (np.cos(self.orientation) * radius)
def __repr__(self):
return '[x=%.5f y=%.5f orient=%.5f]' % (self.x, self.y, self.orientation)
############## ADD / MODIFY CODE BELOW ####################
# ------------------------------------------------------------------------
#
# run - does a single control run
# previous P controller
def run_p(robot, tau, n=100, speed=1.0):
x_trajectory = []
y_trajectory = []
for i in range(n):
cte = robot.y
steer = -tau * cte
robot.move(steer, speed)
x_trajectory.append(robot.x)
y_trajectory.append(robot.y)
return x_trajectory, y_trajectory
robot = Robot()
robot.set(0, 1, 0)
def run(robot, tau_p, tau_d, n=100, speed=1.0):
x_trajectory = []
y_trajectory = []
pre_CTE = robot.y
CTE = robot.y
# TODO: your code here
for i in range(n):
pre_CTE = CTE;
CTE = robot.y
diff_CTE =CTE - pre_CTE
steer = -tau_p * CTE - tau_d * diff_CTE
robot.move(steer, speed)
x_trajectory.append(robot.x)
y_trajectory.append(robot.y)
return x_trajectory, y_trajectory
x_trajectory, y_trajectory = run(robot, 0.2, 3.0)
n = len(x_trajectory)
plt.plot(x_trajectory, y_trajectory, 'g', label='PD controller')
plt.plot(x_trajectory, np.zeros(n), 'r', label='reference')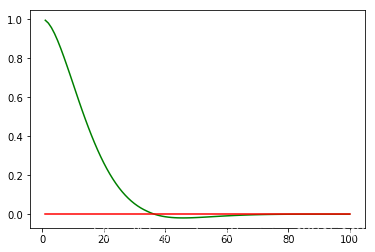
3. 当转向角有偏差的时候,PD够用么?。
感觉上图似乎有很不错的控制了,因该不需要其它的什么了吧。可是,当转向角有一定偏差的时候会怎么样,这里robot.set_steering_drift(0.1)加入0.1的偏差看看,效果很不理想啊。此时似乎光PD还是不够用。为应对此不足,积分项intergral就该出场了。
import random
import numpy as np
import matplotlib.pyplot as plt
# ------------------------------------------------
#
# this is the Robot class
#
class Robot(object):
def __init__(self, length=20.0):
"""
Creates robot and initializes location/orientation to 0, 0, 0.
"""
self.x = 0.0
self.y = 0.0
self.orientation = 0.0
self.length = length
self.steering_noise = 0.0
self.distance_noise = 0.0
self.steering_drift = 0.0
def set(self, x, y, orientation):
"""
Sets a robot coordinate.
"""
self.x = x
self.y = y
self.orientation = orientation % (2.0 * np.pi)
def set_noise(self, steering_noise, distance_noise):
"""
Sets the noise parameters.
"""
# makes it possible to change the noise parameters
# this is often useful in particle filters
self.steering_noise = steering_noise
self.distance_noise = distance_noise
def set_steering_drift(self, drift):
"""
Sets the systematical steering drift parameter
"""
self.steering_drift = drift
def move(self, steering, distance, tolerance=0.001, max_steering_angle=np.pi / 4.0):
"""
steering = front wheel steering angle, limited by max_steering_angle
distance = total distance driven, most be non-negative
"""
if steering > max_steering_angle:
steering = max_steering_angle
if steering < -max_steering_angle:
steering = -max_steering_angle
if distance < 0.0:
distance = 0.0
# apply noise
steering2 = random.gauss(steering, self.steering_noise)
distance2 = random.gauss(distance, self.distance_noise)
# apply steering drift
steering2 += self.steering_drift
# Execute motion
turn = np.tan(steering2) * distance2 / self.length
if abs(turn) < tolerance:
# approximate by straight line motion
self.x += distance2 * np.cos(self.orientation)
self.y += distance2 * np.sin(self.orientation)
self.orientation = (self.orientation + turn) % (2.0 * np.pi)
else:
# approximate bicycle model for motion
radius = distance2 / turn
cx = self.x - (np.sin(self.orientation) * radius)
cy = self.y + (np.cos(self.orientation) * radius)
self.orientation = (self.orientation + turn) % (2.0 * np.pi)
self.x = cx + (np.sin(self.orientation) * radius)
self.y = cy - (np.cos(self.orientation) * radius)
def __repr__(self):
return '[x=%.5f y=%.5f orient=%.5f]' % (self.x, self.y, self.orientation)
############## ADD / MODIFY CODE BELOW ####################
# ------------------------------------------------------------------------
#
# run - does a single control run
# previous P controller
def run_p(robot, tau, n=100, speed=1.0):
x_trajectory = []
y_trajectory = []
for i in range(n):
cte = robot.y
steer = -tau * cte
robot.move(steer, speed)
x_trajectory.append(robot.x)
y_trajectory.append(robot.y)
return x_trajectory, y_trajectory
robot = Robot()
robot.set(0, 1, 0)
############# 加入偏差
robot.set_steering_drift(0.1)
def run(robot, tau_p, tau_d, n=100, speed=1.0):
x_trajectory = []
y_trajectory = []
pre_CTE = robot.y
CTE = robot.y
# TODO: your code here
for i in range(n):
pre_CTE = CTE;
CTE = robot.y
diff_CTE =CTE - pre_CTE
steer = -tau_p * CTE - tau_d * diff_CTE
robot.move(steer, speed)
x_trajectory.append(robot.x)
y_trajectory.append(robot.y)
return x_trajectory, y_trajectory
x_trajectory, y_trajectory = run(robot, 0.2, 3.0)
n = len(x_trajectory)
plt.plot(x_trajectory, y_trajectory, 'g', label='PD controller')
plt.plot(x_trajectory, np.zeros(n), 'r', label='reference')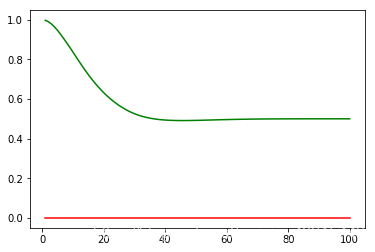
4. 加入积分项intergal, 变成PID控制。
从上图看出来了,一旦有转向偏差,效果急转直下。来以为熟悉的自行车来比喻下,当你骑自行车时,你认为把车把打直了,可是还是歪了一定角度,你还不是跑偏。此时我们怎么找正了,是不是骑着骑着感觉偏向一边了,我们往反方先适当转向以下就好了。积分就是这个原理,根据过去的误差之和来修正转向角。steer = -tau_p * cte - tau_d * diff_cte - tau_i * int_cte. 从下图来看是不是得到了明显的好转。
# -----------
# User Instructions
#
# Implement a P controller by running 100 iterations
# of robot motion. The steering angle should be set
# by the parameter tau so that:
#
# steering = -tau_p * CTE - tau_d * diff_CTE - tau_i * int_CTE
#
# where the integrated crosstrack error (int_CTE) is
# the sum of all the previous crosstrack errors.
# This term works to cancel out steering drift.
#
# Only modify code at the bottom! Look for the TODO.
# ------------
import random
import numpy as np
import matplotlib.pyplot as plt
# ------------------------------------------------
#
# this is the Robot class
#
class Robot(object):
def __init__(self, length=20.0):
"""
Creates robot and initializes location/orientation to 0, 0, 0.
"""
self.x = 0.0
self.y = 0.0
self.orientation = 0.0
self.length = length
self.steering_noise = 0.0
self.distance_noise = 0.0
self.steering_drift = 0.0
def set(self, x, y, orientation):
"""
Sets a robot coordinate.
"""
self.x = x
self.y = y
self.orientation = orientation % (2.0 * np.pi)
def set_noise(self, steering_noise, distance_noise):
"""
Sets the noise parameters.
"""
# makes it possible to change the noise parameters
# this is often useful in particle filters
self.steering_noise = steering_noise
self.distance_noise = distance_noise
def set_steering_drift(self, drift):
"""
Sets the systematical steering drift parameter
"""
self.steering_drift = drift
def move(self, steering, distance, tolerance=0.001, max_steering_angle=np.pi / 4.0):
"""
steering = front wheel steering angle, limited by max_steering_angle
distance = total distance driven, most be non-negative
"""
if steering > max_steering_angle:
steering = max_steering_angle
if steering < -max_steering_angle:
steering = -max_steering_angle
if distance < 0.0:
distance = 0.0
# apply noise
steering2 = random.gauss(steering, self.steering_noise)
distance2 = random.gauss(distance, self.distance_noise)
# apply steering drift
steering2 += self.steering_drift
# Execute motion
turn = np.tan(steering2) * distance2 / self.length
if abs(turn) < tolerance:
# approximate by straight line motion
self.x += distance2 * np.cos(self.orientation)
self.y += distance2 * np.sin(self.orientation)
self.orientation = (self.orientation + turn) % (2.0 * np.pi)
else:
# approximate bicycle model for motion
radius = distance2 / turn
cx = self.x - (np.sin(self.orientation) * radius)
cy = self.y + (np.cos(self.orientation) * radius)
self.orientation = (self.orientation + turn) % (2.0 * np.pi)
self.x = cx + (np.sin(self.orientation) * radius)
self.y = cy - (np.cos(self.orientation) * radius)
def __repr__(self):
return '[x=%.5f y=%.5f orient=%.5f]' % (self.x, self.y, self.orientation)
############## ADD / MODIFY CODE BELOW ####################
# ------------------------------------------------------------------------
#
# run - does a single control run
robot = Robot()
robot.set(0, 1, 0)
robot.set_steering_drift(0.1)
def run(robot, tau_p, tau_d, tau_i, n=100, speed=1.0):
x_trajectory = []
y_trajectory = []
# TODO: your code here
pre_cte = robot.y
int_cte = 0.0
for i in range(n):
cte = robot.y
diff_cte = cte - pre_cte
pre_cte = cte
int_cte += cte
steer = -tau_p * cte - tau_d * diff_cte - tau_i * int_cte
robot.move(steer,speed)
x_trajectory.append(robot.x)
y_trajectory.append(robot.y)
return x_trajectory, y_trajectory
x_trajectory, y_trajectory = run(robot, 0.2, 3.0, 0.004)
n = len(x_trajectory)
plt.plot(x_trajectory, y_trajectory, 'g', label='PID controller')
plt.plot(x_trajectory, np.zeros(n), 'r', label='reference')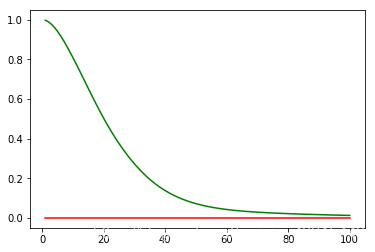
5. PID依次出场了,似乎还不错。可是我们如何确定那三个关键参数了,tau_p, tau_i, tau_d。Twiddle该出场了。
这三个参数给多大合适了,可能我们只知道个大概,那怎么解决了,如何去寻优了,这就要看Twiddle了。具体怎么实现看下面Twiddle代码。
# ----------------
# User Instructions
#
# Implement twiddle as shown in the previous two videos.
# Your accumulated error should be very small!
#
# You don't have to use the exact values as shown in the video
# play around with different values! This quiz isn't graded just see
# how low of an error you can get.
#
# Try to get your error below 1.0e-10 with as few iterations
# as possible (too many iterations will cause a timeout).
#
# No cheating!
# ------------
import random
import numpy as np
import matplotlib.pyplot as plt
# ------------------------------------------------
#
# this is the Robot class
#
class Robot(object):
def __init__(self, length=20.0):
"""
Creates robot and initializes location/orientation to 0, 0, 0.
"""
self.x = 0.0
self.y = 0.0
self.orientation = 0.0
self.length = length
self.steering_noise = 0.0
self.distance_noise = 0.0
self.steering_drift = 0.0
def set(self, x, y, orientation):
"""
Sets a robot coordinate.
"""
self.x = x
self.y = y
self.orientation = orientation % (2.0 * np.pi)
def set_noise(self, steering_noise, distance_noise):
"""
Sets the noise parameters.
"""
# makes it possible to change the noise parameters
# this is often useful in particle filters
self.steering_noise = steering_noise
self.distance_noise = distance_noise
def set_steering_drift(self, drift):
"""
Sets the systematical steering drift parameter
"""
self.steering_drift = drift
def move(self, steering, distance, tolerance=0.001, max_steering_angle=np.pi / 4.0):
"""
steering = front wheel steering angle, limited by max_steering_angle
distance = total distance driven, most be non-negative
"""
if steering > max_steering_angle:
steering = max_steering_angle
if steering < -max_steering_angle:
steering = -max_steering_angle
if distance < 0.0:
distance = 0.0
# apply noise
steering2 = random.gauss(steering, self.steering_noise)
distance2 = random.gauss(distance, self.distance_noise)
# apply steering drift
steering2 += self.steering_drift
# Execute motion
turn = np.tan(steering2) * distance2 / self.length
if abs(turn) < tolerance:
# approximate by straight line motion
self.x += distance2 * np.cos(self.orientation)
self.y += distance2 * np.sin(self.orientation)
self.orientation = (self.orientation + turn) % (2.0 * np.pi)
else:
# approximate bicycle model for motion
radius = distance2 / turn
cx = self.x - (np.sin(self.orientation) * radius)
cy = self.y + (np.cos(self.orientation) * radius)
self.orientation = (self.orientation + turn) % (2.0 * np.pi)
self.x = cx + (np.sin(self.orientation) * radius)
self.y = cy - (np.cos(self.orientation) * radius)
def __repr__(self):
return '[x=%.5f y=%.5f orient=%.5f]' % (self.x, self.y, self.orientation)
############## ADD / MODIFY CODE BELOW ####################
# ------------------------------------------------------------------------
#
# run - does a single control run
def make_robot():
"""
Resets the robot back to the initial position and drift.
You'll want to call this after you call `run`.
"""
robot = Robot()
robot.set(0, 1, 0)
robot.set_steering_drift(0.1)
return robot
# NOTE: We use params instead of tau_p, tau_d, tau_i
def run(robot, params, n=100, speed=1.0):
x_trajectory = []
y_trajectory = []
err = 0
prev_cte = robot.y
int_cte = 0
for i in range(2 * n):
cte = robot.y
diff_cte = cte - prev_cte
int_cte += cte
prev_cte = cte
steer = -params[0] * cte - params[1] * diff_cte - params[2] * int_cte
robot.move(steer, speed)
x_trajectory.append(robot.x)
y_trajectory.append(robot.y)
if i >= n:
err += cte ** 2
return x_trajectory, y_trajectory, err / n
####################### Twiddle #######################################
# Make this tolerance bigger if you are timing out!
def twiddle(tol=0.2):
# Don't forget to call `make_robot` before every call of `run`!
p = [0, 0, 0]
dp = [1, 1, 1]
robot = make_robot()
x_trajectory, y_trajectory, best_err = run(robot, p)
# TODO: twiddle loop here
while (sum(dp)>tol):
for i in range(3):
p[i] +=dp[i]
robot = make_robot()
x_tr, y_tr, err = run(robot, p)
if (err<best_err):
best_err = err
dp[i] *= 1.1
else:
p[i] -=2*dp[i]
robot = make_robot()
x_tr, y_tr, err = run(robot, p)
if (err<best_err):
best_err = err
dp[i] *= 1.1
else:
p[i] += dp[i]
dp[i] *= 0.9
return p, best_err
##########################################################################
params, err = twiddle()
print("Final twiddle error = {}".format(err))
robot = make_robot()
x_trajectory, y_trajectory, err = run(robot, params)
n = len(x_trajectory)
plt.plot(x_trajectory, y_trajectory, 'g', label='Twiddle PID controller')
plt.plot(x_trajectory, np.zeros(n), 'r', label='reference')Final twiddle error = 1.1559338514217162e-18
注:此学习笔记中代码来自udacity无人驾驶。