本文重点介绍PX4飞控的Navigator和mission控制框架和逻辑。Navigator导航部分是无人机自主飞行控制的核心所在,其中包括自主起飞、自主降落、自主返航、自主任务以及GPS失效保护等各个部分。搞懂这个部分有助于理解无人机的自主飞行过程,闲话少说,上干货。
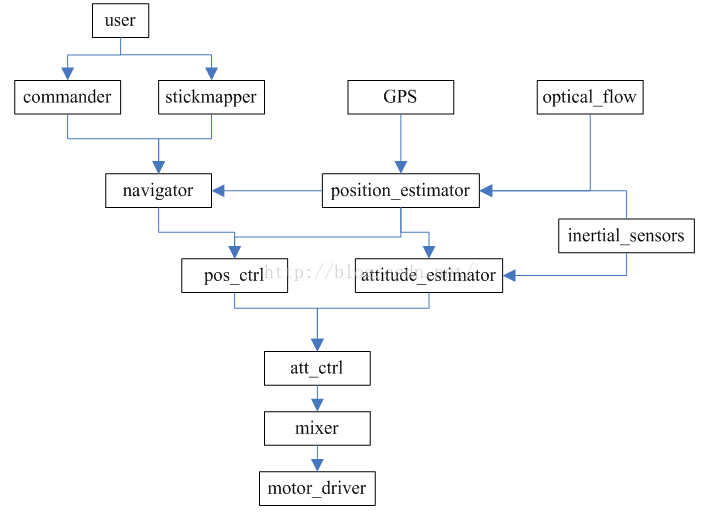
PX4飞控的整体架构参见Px4源码框架结构图
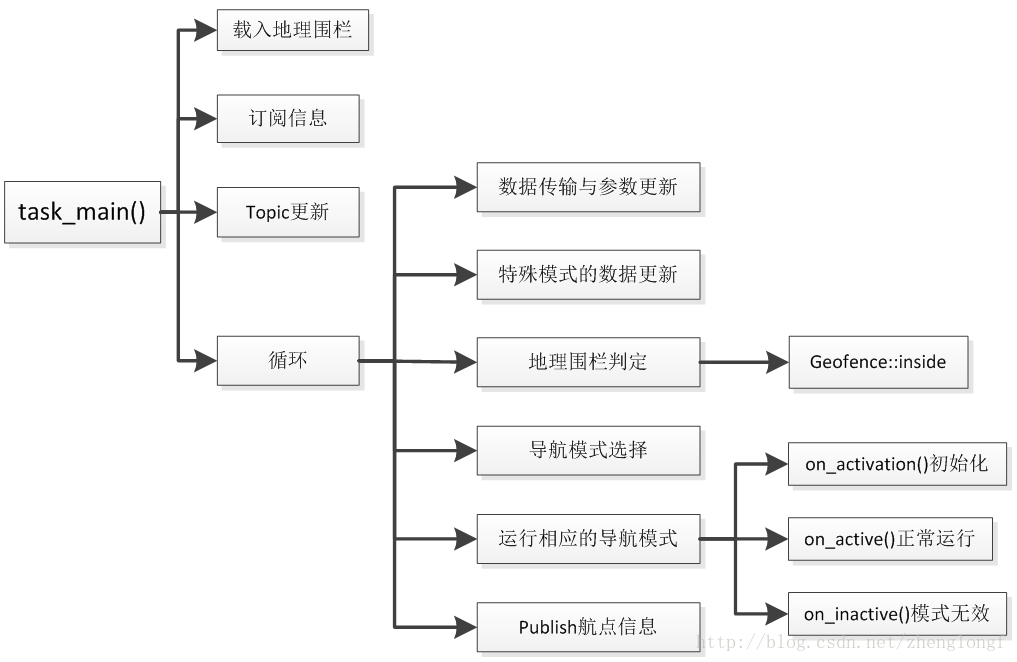
Navigator模块主要功能在于确定任务类型、地理围栏、失效保护,把任务航点更新后送给位置控制器。其中task_main函数是主函数。
在task_main 函数中,主要分为如下几个部分:
当commander中的传输来的导航模式为mission时,依次运行mission.cpp中的三个函数:初始化on_activation()、主函数on_active()、退出函数on_inactive()。
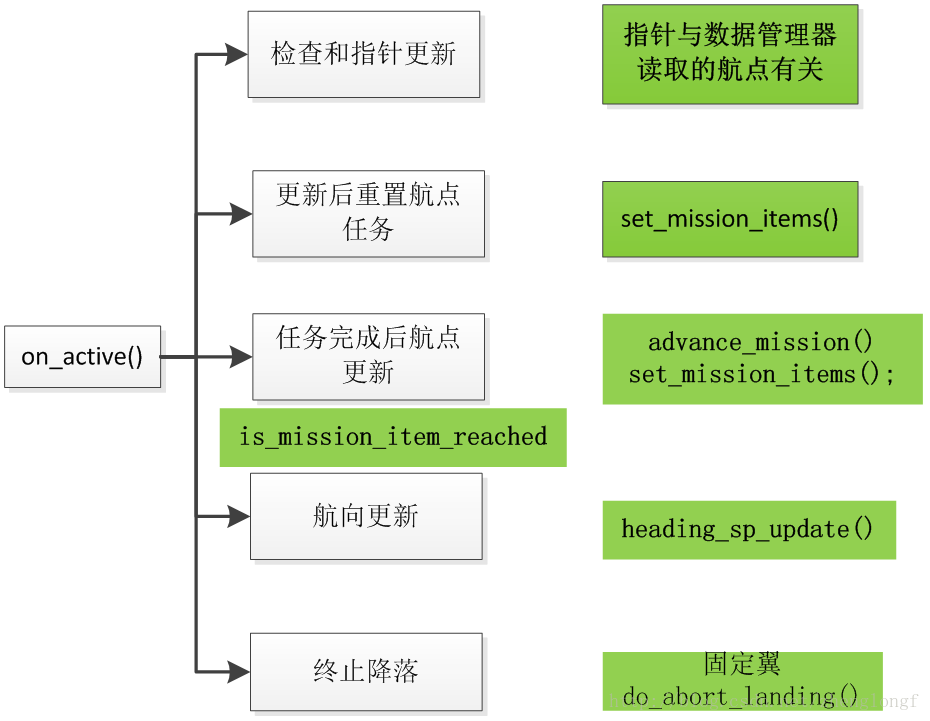
对于mission模式的主函数on_active(),代码逻辑如下:
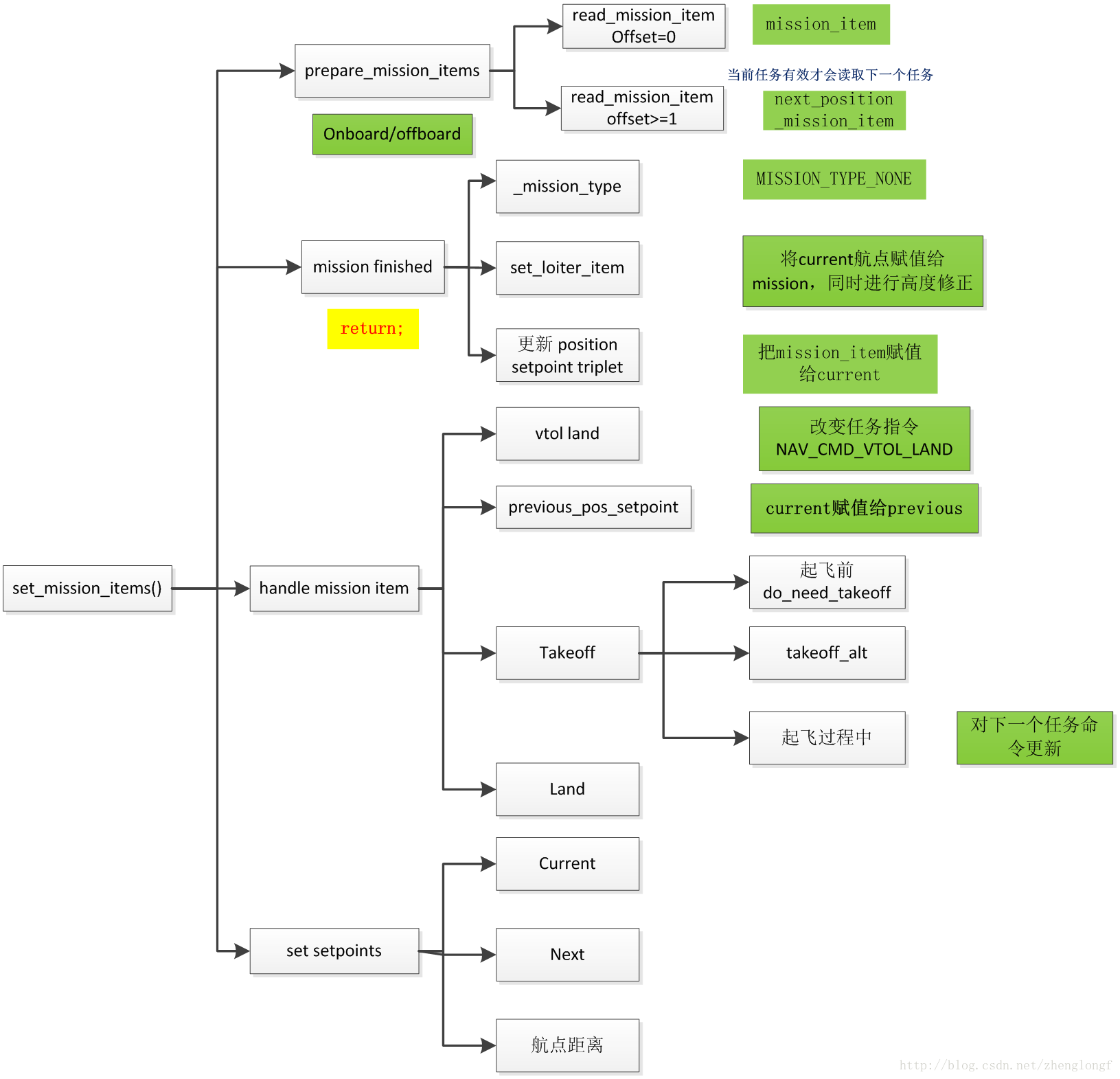
mission的主要功能在于对航点数组pos_sp_triplet更新和赋值,航点数组包括previous、current、next三个航点,这一功能由函数set_mission_item()来实现,主要的逻辑为先从SD卡中读取航点信息read_mission_item()赋值给结构体mission_item,然后再将当前航点复制给pos_sp_triplet.current
每当一个航点任务完成is_mission_item_reached()返回值为true,则指针++,读取SD卡中的下一个航点。而判断航点的是否完成由三个判断条件:
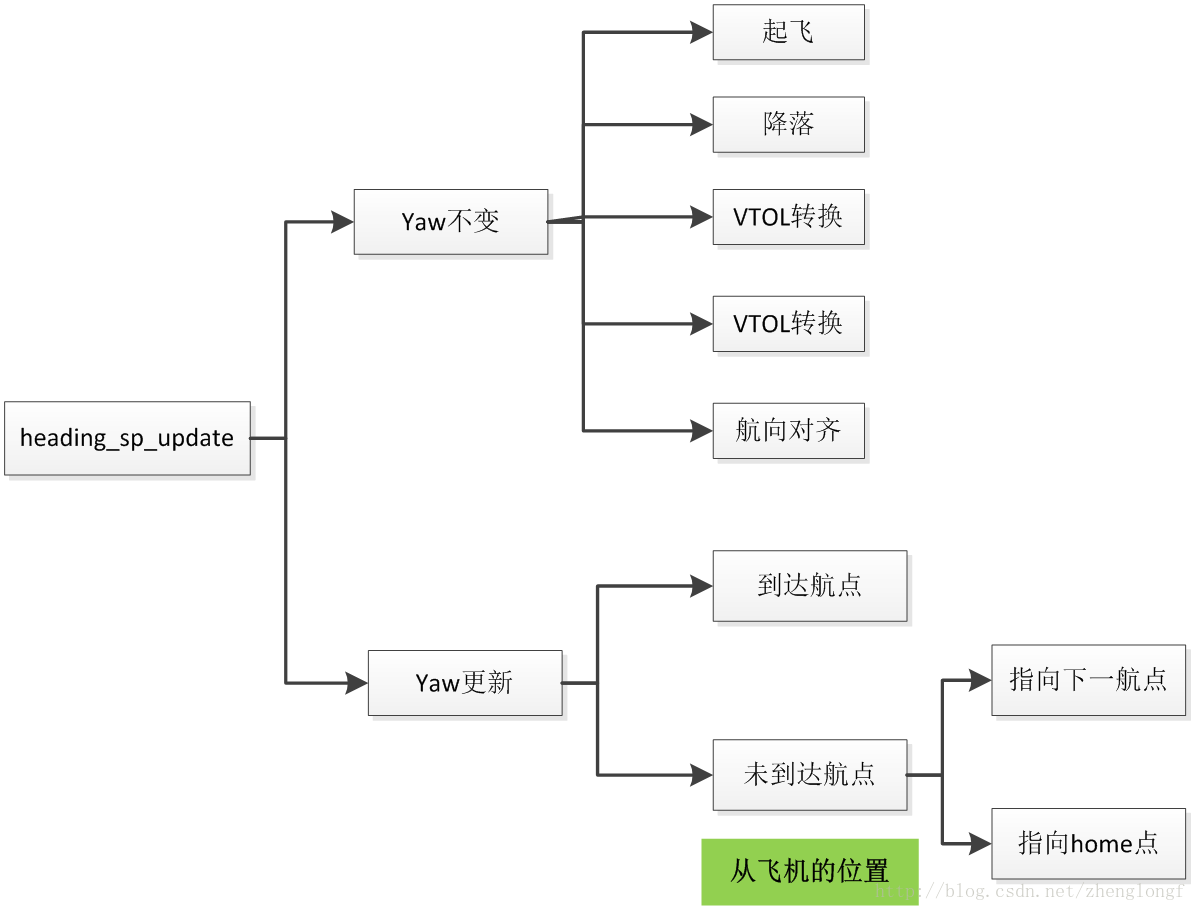
航向控制由函数heading_sp_update()实现,将航向setpoint计算赋值给pos_sp_triplet.current.yaw,给到pos控制环,进行航向控制。
至此,导航完成了航点经纬高、航点类型、航向等信息的更新。而位置控制环以pos_sp_triplet为目标进行控制。
注:航点数组中的高度为绝对高度。
【PX4 学习4】导航及任务框架


猜你喜欢
转载自blog.csdn.net/wb790238030/article/details/86548657
今日推荐
周排行