目录
下载固件
注意
在开始安装固件之前,必须断开与飞控的所有USB连接(直接或通过遥测无线电)。飞控不得由电池供电。
默认下载的是最新发布的PX4稳定版固件
下载原生稳定版固件
下载步骤:
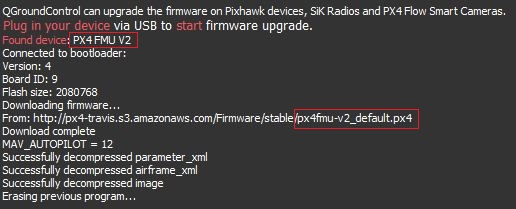
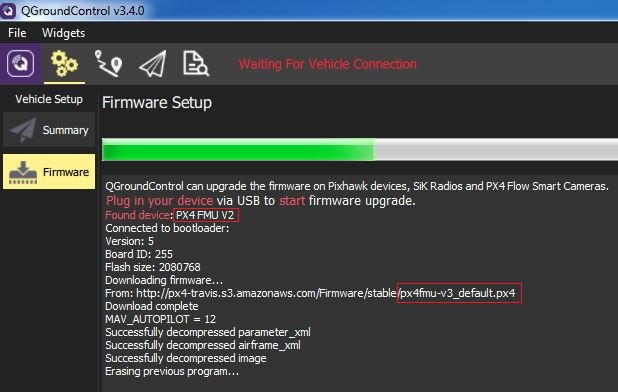
打开下图页面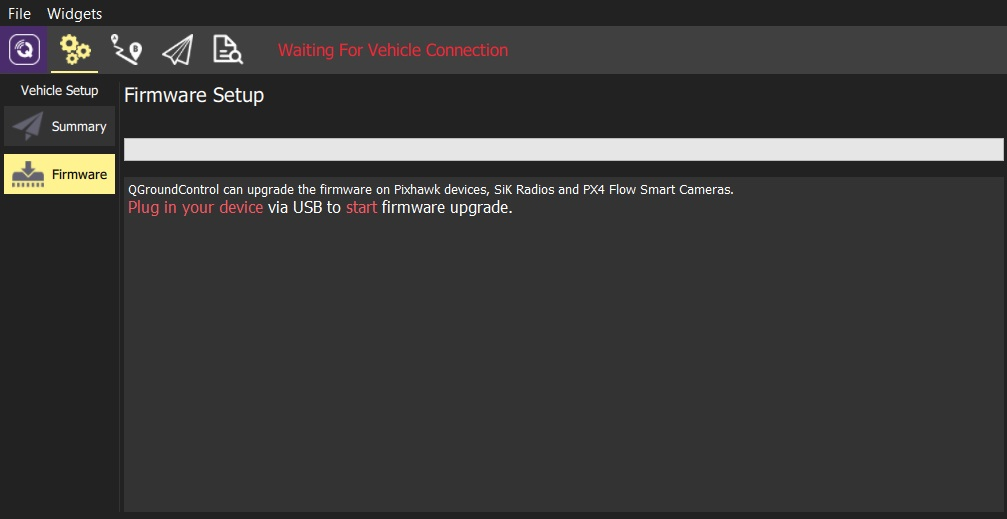
通过USB连接飞控
注意
直接通过USB进行连接,而不是通过USB集线器
-
选择需要下载的固件,默认会下载最新稳定版
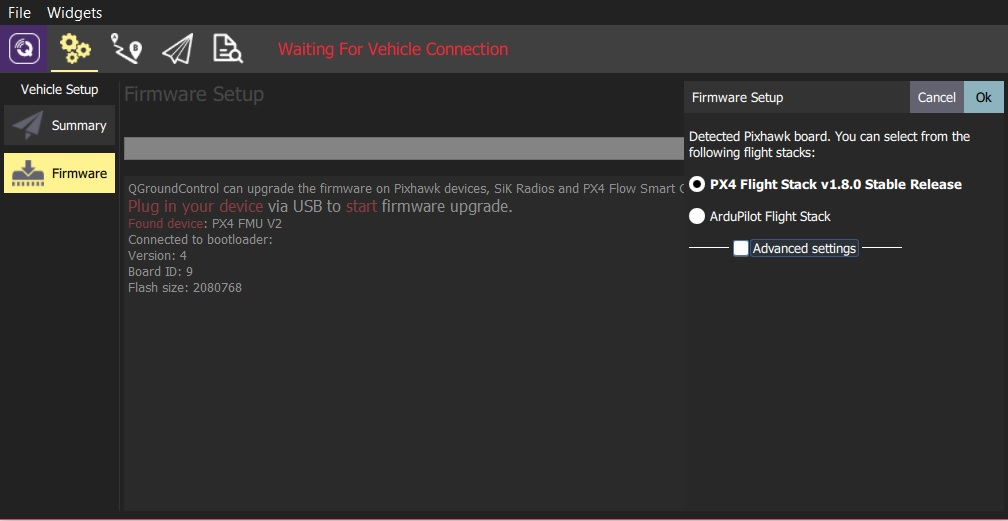
-
点进OK进行下载
然后,固件将进行一系列升级步骤(下载新固件、擦除旧固件等)。每个步骤都会打印到屏幕上,整个进度显示在进度条上。
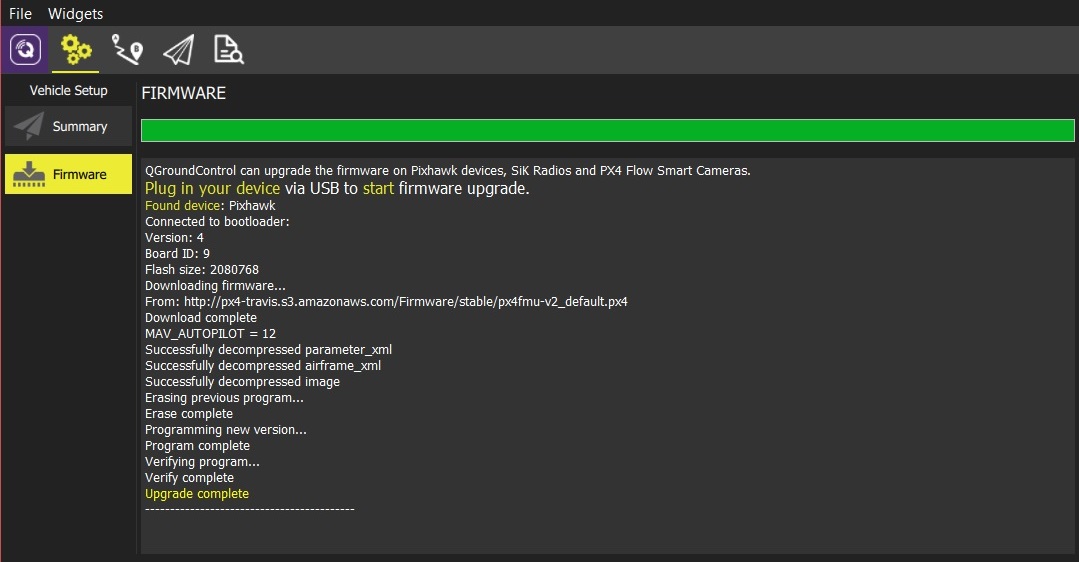
固件加载完成后,飞控将重新启动并重新连接。
提示
如果QGroundControl安装了FMUv2目标(请参阅安装过程中的控制台),但是您有一个更新的飞控板,您可能需要更新bootloader程序才能访问飞行控制器上的所有内存。
接下来,您需要设置机身(然后是传感器、无线电等)
安装PX4 Master, Beta或自定义固件
- 下载固件时打开下图页面
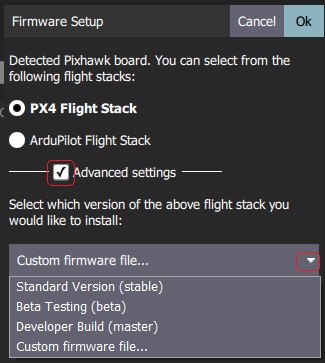
- 点击 Advanced settings 选择下拉显示框
- Standard Version (stable): 默认版本(即无需使用Advanced settings 来安装!)
- Beta Testing (beta): 测试版/候选版本。只有当新版本准备完毕时才可用。
- Developer Build (master): PX4的最新版本。
- Custom Firmware file...: 自定义固件文件(例如,您在本地构建的)。如果选择自定义固件文件,您需要在下一步中从文件系统中选择自定义固件。
Firmware update then continues as before.
FMUv2 Bootloader 更新
如果QGroundControl安装了FMUv2固件,并且您有一个更新的飞控板(内存2M),您可能需要更新引导加载程序才能访问飞行控制器上的所有内存。
注解
早期的FMUv2 Pixhawk系列飞行控制器存在硬件问题,限制其使用1MB闪存。该问题已在较新的板上修复,但您可能需要更新工厂提供的引导程序,以便安装FMUv3固件并访问所有2MB可用内存。
更新bootloader步骤:
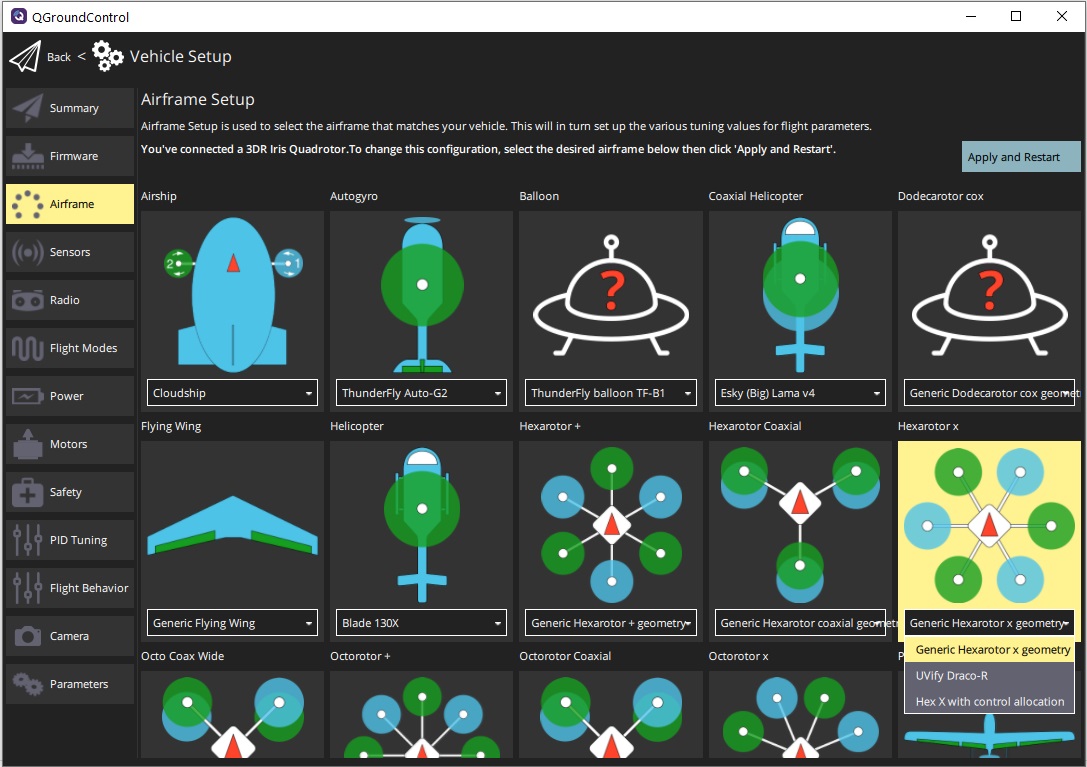
先选择你的机架符合的大致分类,然后在下拉菜单中选择最匹配的机架类型
-
插入 SD 卡(启用引导日志记录,便于调试任何可能的问题。)
-
升级到PX4主分支版本(更新固件时,请选中高级设置,然后从下拉列表中选择Developer Build (master))。QGroundControl将自动检测硬件是否支持FMUv2,并安装相应的固件。
等待飞控重启。
-
找到并启用 参数 SYS_BL_UPDATE。
-
重新启动(断开/重新连接飞控板)。 Bootloader更新只需要几秒钟即可完成。
-
然后再重新 更新固件 。 这一次,QGroundControl应将硬件自动检测为FMUv3,并更新固件。
机架设置
安装固件后,您需要选择最适合您载具的 机架配置。
注解
根据机架品牌和型号选择机架配置(如果有),否则,选择“通用”机架选项。连接飞控和地面站,点击 "Q" 图标 > Vehicle Setup > Airframe
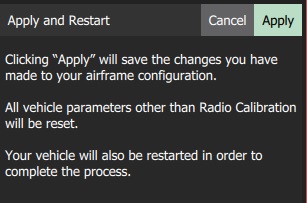
单击应用并重新启动。在以下提示中单击应用以保存设置并重新启动车辆。
飞行控制器/传感器方向
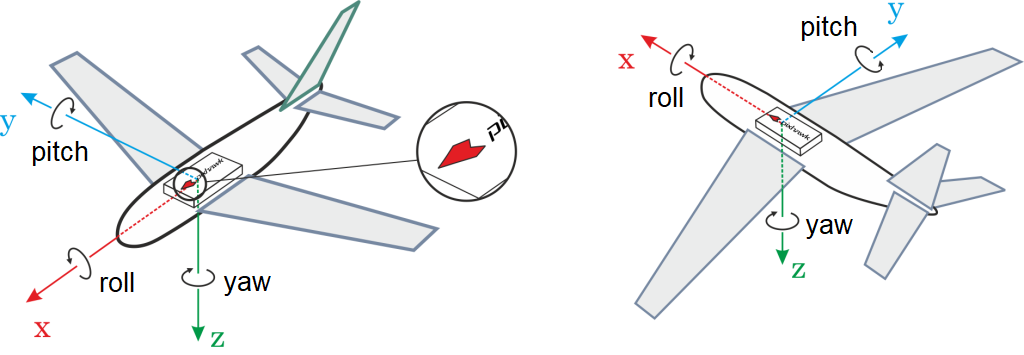
默认的飞行器(如果具有外部罗盘)应该向上安装在机架上部,箭头朝向飞行器的前方。 如果板载或外部罗盘被安装在其他方向,需要在固件中配置。
计算朝向
飞行控制器的滚转、俯仰和/或偏航偏移是相对于车辆绕前(x)、右(y)、下(z)轴计算的。
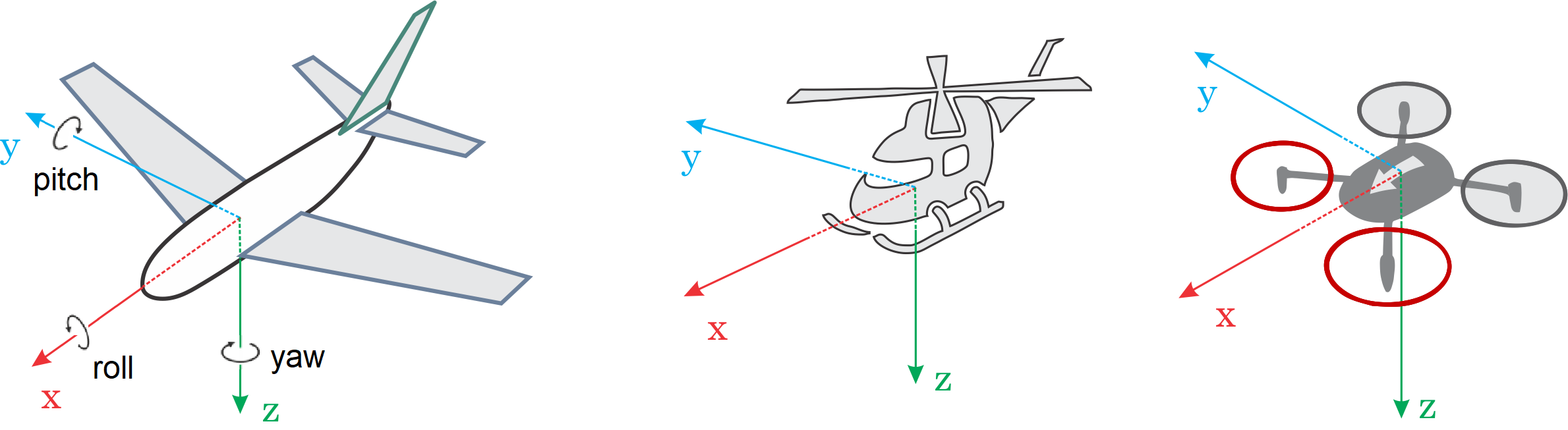
朝前(x)、右(y)、下(z)看时,顺时针旋转为正,逆时针旋转为负
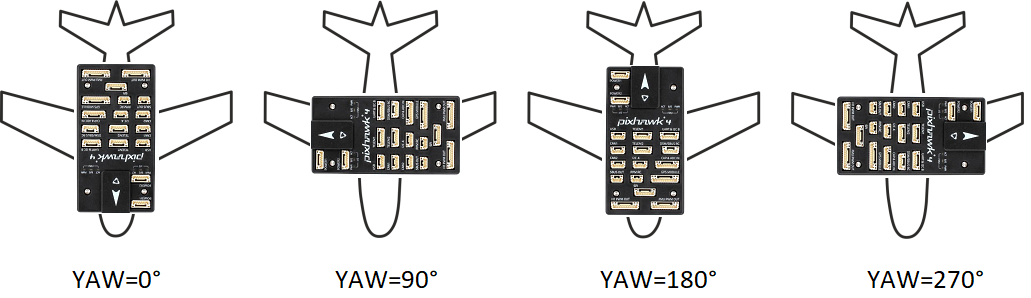
例如,下面所示的车辆具有围绕z轴的旋转(即仅偏航),对应于:ROTATION_NONE,ROTATION_YAW_90,ROTATION_YAW_180,ROTATION_YAW_270.
注解
对于垂直起降尾座飞机机身,根据其多旋翼配置(即在起飞、悬停、着陆过程中相对于飞行器)为所有传感器校准设置飞行器方向。
在稳定向前飞行期间,轴通常相对于飞行器的方向。
设置朝向
打开地面站,连接飞机
选择Vehicle Setup->Sensors
选择 Set Orientations 按钮.
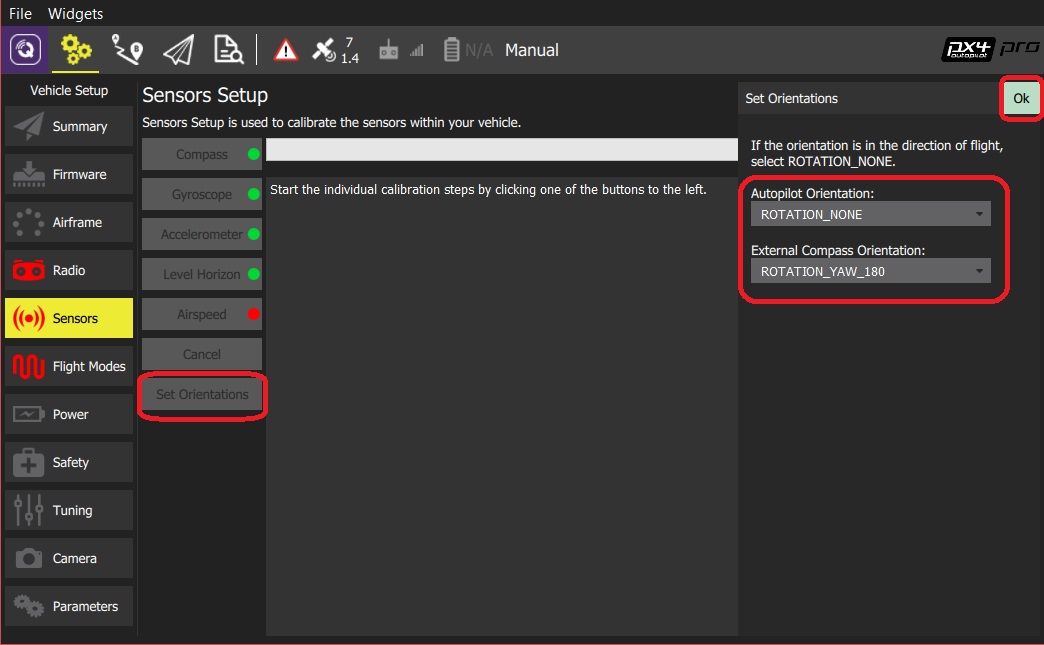
选择自动驾驶仪方向(如上计算)。
-

-
以相同的方式选择外部指南针方向(仅当您的机架具有外部罗盘时才会显示此选项)。
-
点击 OK.
罗盘校准
罗盘校准过程配置了所有连接的外部和内部罗盘,QGroundControl将引导您在多个设定方向上围绕指定轴旋转车辆。
首次使用罗盘时,您需要校准罗盘,如果车辆暴露在非常强的磁场中,或者在具有异常磁特性的区域使用,您可能需要重新校准。
罗盘校准有两种类型:
首次在机身上安装自动驾驶仪后或车辆配置发生重大变化时,需要进行此校准。
注解
如果您使用的是外部磁强计/罗盘(或集成到GPS模块中的罗盘),请确保它安装在尽可能远离其他电子设备的位置,并处于受支持的方向。有关连接GPS+指南针的说明,请参见特定自动驾驶仪硬件的基本装配。一旦连接,QGroundControl将自动检测外部磁力计。
提示
罗盘校准不良的迹象包括盘旋时的多旋翼半径变大,或试图直飞时偏离航路。
执行校准
校准步骤如下:
选择远离大型金属物体或磁场的位置。金属并不总是显而易见的!避免在办公桌(通常包含金属棒)顶部或车辆旁边进行校准。如果你站在钢筋分布不均匀的混凝土板上,校准甚至会受到影响。
启动QGroundControl并连接载具。
选择顶部工具栏中的齿轮图标(车辆设置),然后选择侧栏中的传感器。
单击罗盘传感器按钮。
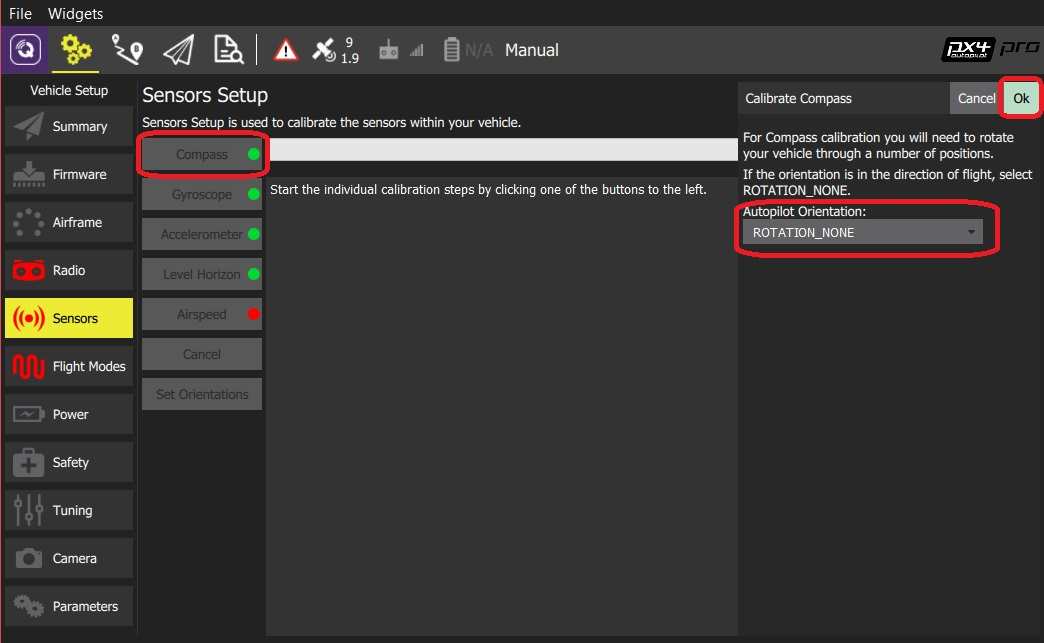
点击 OK开始校准
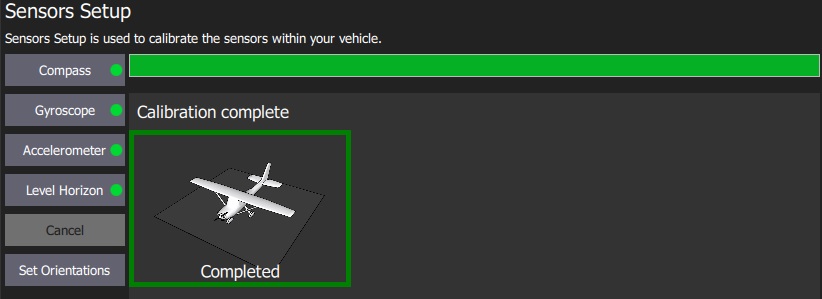
把你的飞机放置在下面显示的某一个方向,并保持静止。 随后提示(方向图像变为黄色)在水平方向旋转飞行器。 该位置标定完成后,屏幕上的相应图示将变成绿色。
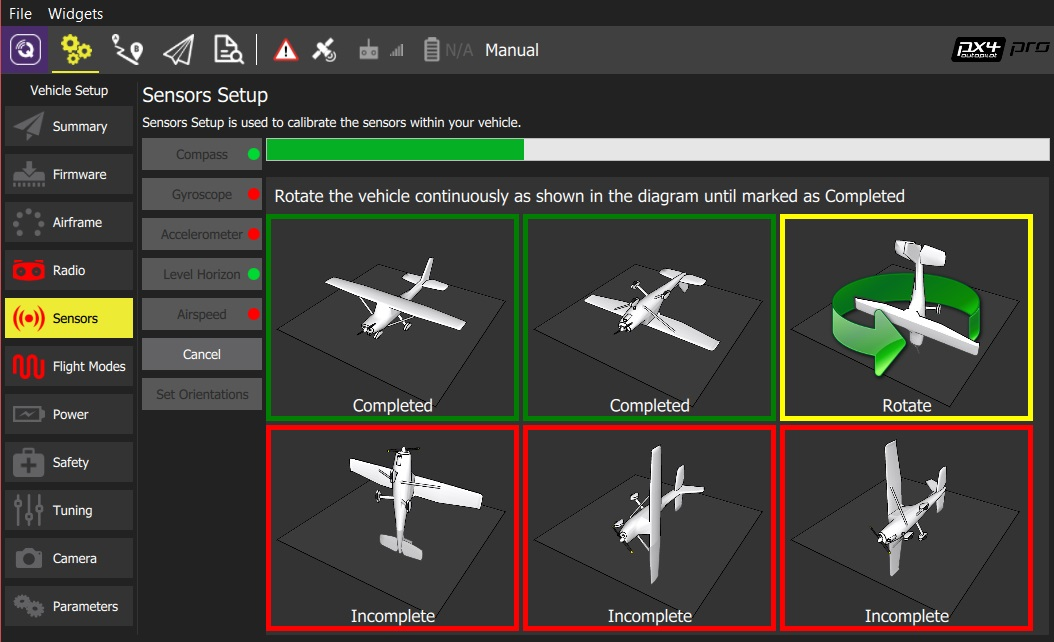
在机体的所有方向上重复校准步骤。
在所有方向校准完毕后,QGroundControl将显示Calibration complete(校准完成)(所有方向图像将显示为绿色,进度条将完全填满)。然后可以继续下一个传感器。
陀螺仪校准
将车辆放置在平坦的地面上并保持静止。
# 执行校准
标定步骤如下:
-
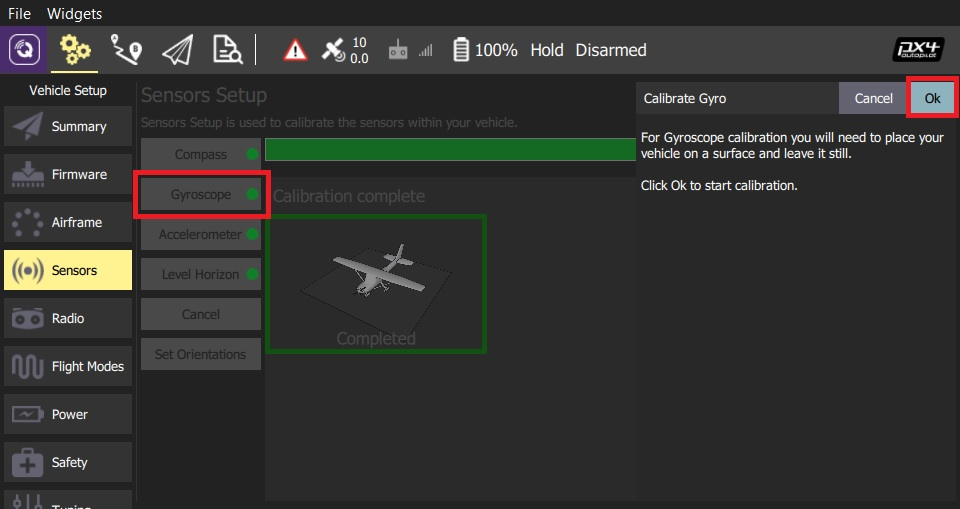
点击Gyroscope 按钮
-
将车辆放置在平坦的地面上并保持静止。
-
点击 Ok 以开始校准
顶部的进度条显示进度:
-
完成后,QGroundControl将显示进度条校准完成
注解
如果移动车辆,QGroundControl将自动重新启动陀螺仪校准。
加速度计
首次使用或飞行控制器方向改变时,您需要校准加速计。否则,您不需要重新校准(除非在冬季,如果您的飞行控制器没有在工厂进行热校准)。
注解
加速计校准不良通常导致飞行前检查报错“高加速计偏差”。
QGroundControl将引导您在多个方向放置和保持车辆(当您在不同位置之间移动时,系统将提示您)。这与指南针校准类似,只是在每个方向上保持车辆静止(而不是旋转)。
注解
校准使用最小二乘“拟合”算法,不需要你有“完美”的90度方位。如果每个轴在校准序列中的某个时间基本上都指向上下,并且车辆保持静止,那么精确的方向并不重要。
执行校准
校准步骤如下:
启动QGroundControl并连接车辆。
选择顶部工具栏中的齿轮图标(车辆设置),然后选择侧栏中的传感器。
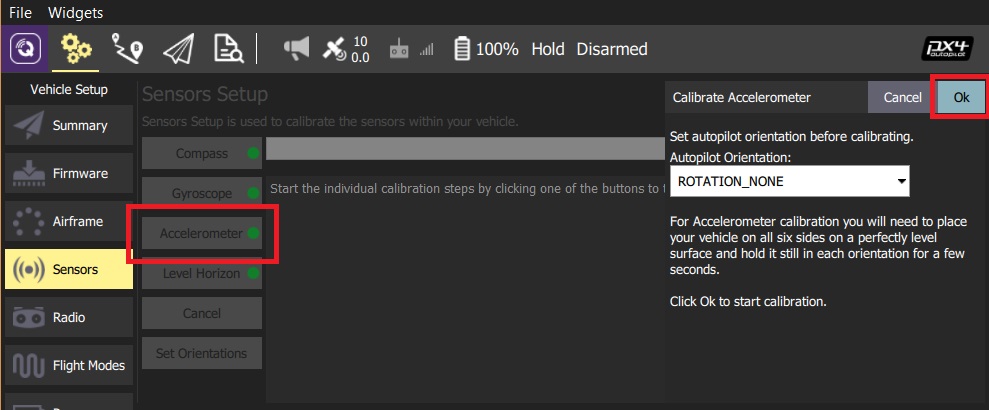
单击加速计传感器按钮。
注解
您应该已经设置了自动驾驶仪方向。如果没有,也可以在此处设置。
单击“确定”开始校准。
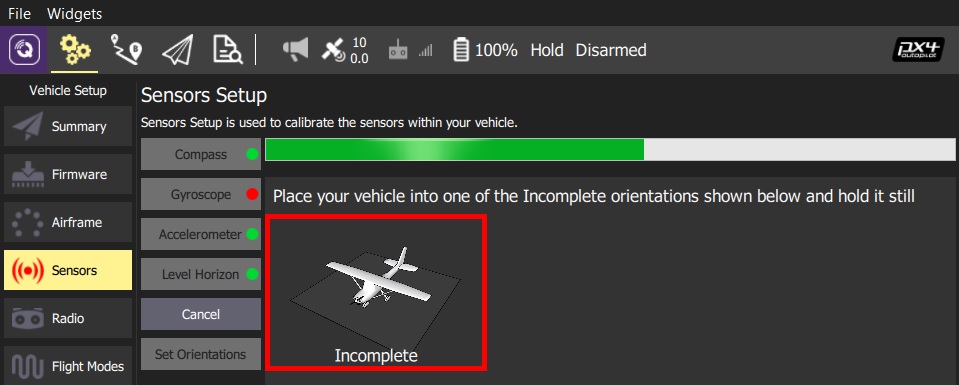
根据屏幕上的图像放置车辆。看到 (图示位置变成黄色) 的提示,握紧机体并保持静止。 该位置标定完成后,屏幕上的相应图示将变成绿色。
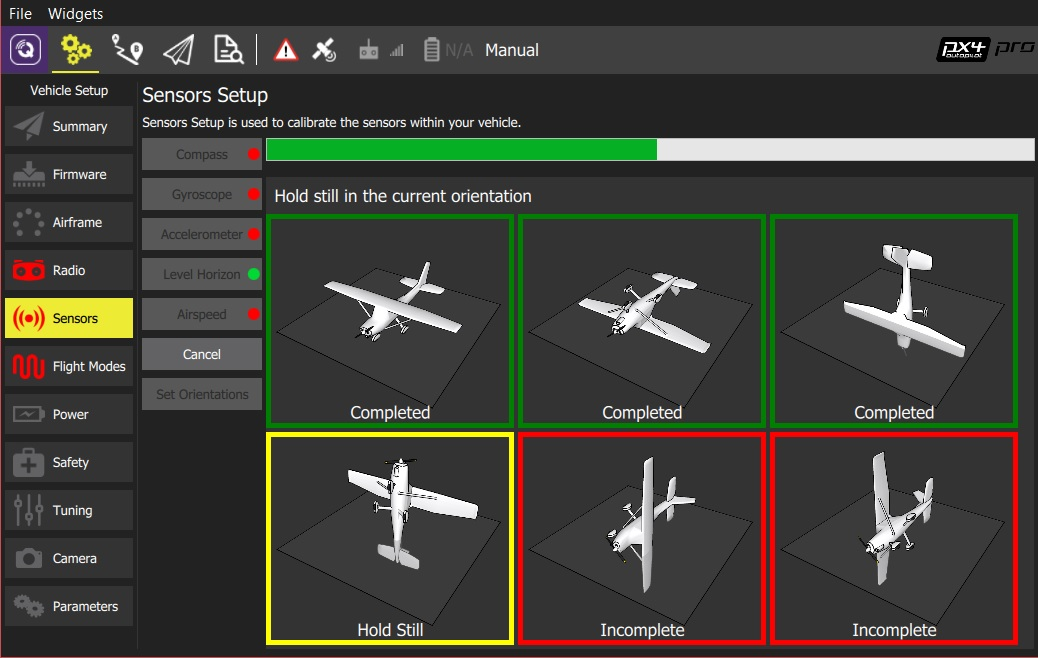
在机体的所有方向上重复校准步骤。在所有位置校准车辆后,QGroundControl将显示Calibration complete(校准完成)(所有方向图像将显示为绿色,进度条将完全填满)。
空速计校准
空速校准需要读取空速为0的稳定基线,以确定偏移。
注解
强烈建议固定翼和垂直起降车辆使用空速传感器。
注意
与大多数其他传感器驱动器不同,空速传感器驱动器不是自动启动的。校准前,必须通过相应参数启用它们:
- Sensirion SDP3X (SENS_EN_SDP3X)
- TE MS4525 (SENS_EN_MS4525DO)
- TE MS5525 (SENS_EN_MS5525DS)
- Eagle Tree airspeed sensor (SENS_EN_ETSASPD)
执行校准
空速校准需要读取空速为0的稳定基线,以确定偏移。将双手放在皮托管上,以阻挡任何风,但不要堵住孔(如果在室内校准传感器,则不需要这样做),然后用嘴向管内吹气。
启动QGroundControl并连接车辆。
选择顶部工具栏中的齿轮图标(车辆设置),然后选择侧栏中的传感器。
单击空速传感器按钮。
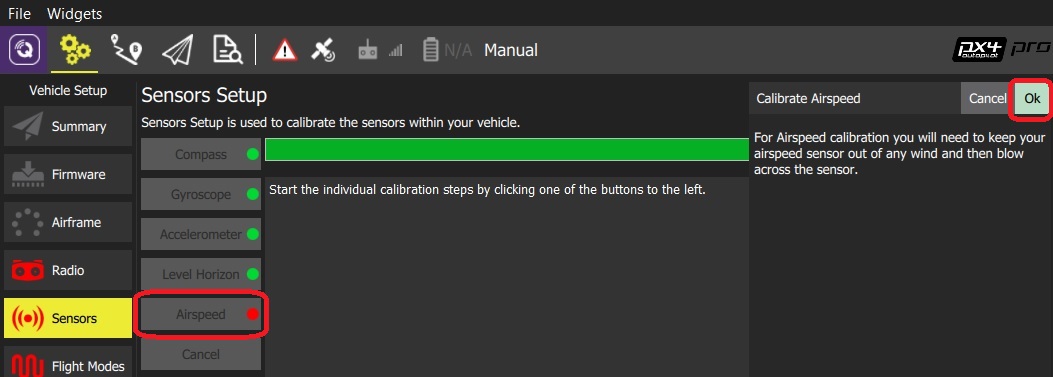
保护传感器免受风吹(即用手将其罩住)。注意不要堵塞它的任何孔。
单击“确定”开始校准。
一旦提示吹气(进度条会停住一下),向皮托管尖端吹气,进度条满表示校准结束。
水平平面校准
您可以使用水平地平线校准来补偿控制器方向上的小偏差对准。
提示
强烈建议调平地平线,这样可以获得最佳的飞行性能。如果您在飞行中注意到持续漂移,也可以重复此过程。
执行校准
启动QGroundControl并连接车辆。
选择顶部工具栏中的齿轮图标(车辆设置),然后选择侧栏中的传感器。
单击“Level Horizon”按钮。
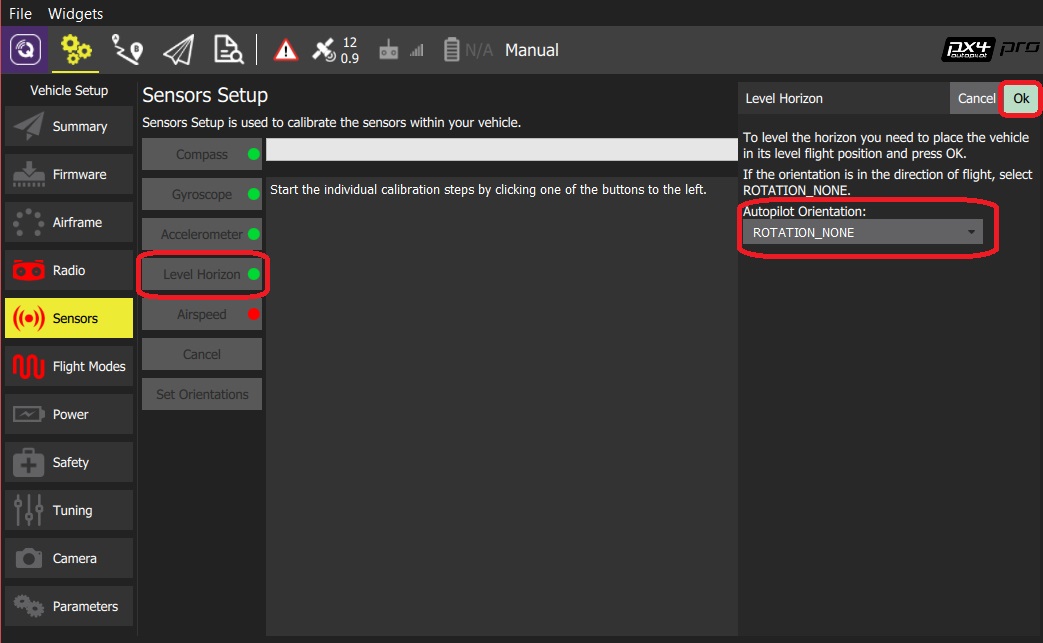
注意:您应该已经设置了自动驾驶仪方向。如果没有,也可以在这里设置。
将飞行器放置于水平方向:
这是飞行器在水平飞行时的位置(飞行器通常会向上轻微翘起!)
对于旋翼机,这是悬停位置。
- 点击 OK 来开始校准
- 等待校准过程结束。
验证
设置方位并完成水平地平线校准后,在飞行视图中检查当您将车辆指向北方时,指南针中的航向是否显示为0左右,并且地平线是否水平(顶部为蓝色,底部为绿色)。