文章目录
基本概念
PX4 1.13.1
本节提供了无人机和使用 PX4 的基本介绍(主要面向新手用户,但对有经验的用户也是一个很好的介绍)。
如果你已经熟悉了基本概念,你可以转到 PX4装机教程 以了解如何组装特定的机架。 要加载固件并使用 QGC 地面站 设置飞行器,请查看 基本配置。
无人机是什么?
无人机是无人驾驶的“机器人”设备,可以远程或自动控制。
无人机可被用于 消费级、工业级、政府、军工应用 (opens new window)。 这包括(非详尽):航空摄影/录像,载货,竞速,搜索和测绘等。
不同类型的无人机可用于空中、地面、海上和水下。 这些(更正式地)被称为无人驾驶飞行器(UAV),无人驾驶飞行器系统(UAS),无人驾驶地面车辆(UGV),无人驾驶水面船只(USV),无人驾驶水下潜航器(UUV)。
无人机的“大脑”被称为自动驾驶仪。 它由 载具控制器(“飞行控制器”)硬件和运行其上的飞行控制栈软件组成。
PX4 自动驾驶仪
PX4 是一个先进的开源飞行控制栈软件.
PX4 的一些主要功能包括:
可控制许多不同的设备机架/类型,包括:飞机(多旋翼,固定翼和垂直起降),地面车辆和水下潜航器。
适用于设备控制器,传感器和其他外围设备的硬件选择。
灵活而强大的飞行模式和安全功能。
PX4 是一个大型无人机平台的核心部分,它们都包括 QGC 地面站,Pixhawk 硬件,还有MAVSDK 用于与机载计算机集成,相机还有其他使用 MAVLink 协议的硬件。 PX4 由 Dronecode 项目支持。
QGroundControl
Dronecode 地面控制站称为 QGC 地面站。 您可以使用QGroundControl 将PX4 加载(烧写)到飞行器控制硬件上,您可以设置飞行器,更改不同参数,获取实时飞行信息以及创建和执行完全自主的任务。
QGroundControl 可以在 Windows,Android,MacOS 或 Linux 上运行。 从这里下载并安装。
飞行控制器
PX4最初设计为在 Pixhawk 系列 飞控上运行,但现在可以在 Linux 计算机和其他硬件上运行。 选择飞行控制板时,您应当考虑飞行器的物理尺寸限制,想要执行的任务,还有成本。
传感器
PX4 使用传感器来确定飞行器状态。 系统使用EKF时最低要求陀螺仪,加速度计,磁力计(罗盘)和气压计。 需要 GPS 或其他定位系统来启用所有自动模式和一些辅助模式。 固定翼和 VTOL 飞行器还应包括空速传感器。
输出:电机,舵机,执行器
PX4使用输出口来控制:电机速度(例如通过ESC),舵机,相机触发器,降落伞,抓手,和许多其他类型的有效载荷。
例如,下面的图像显示 Pixhawk 4 和 Pixhawk 4 mini 的 PWM 输出端口。
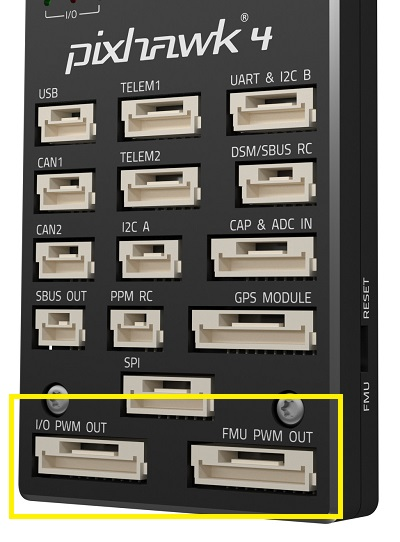

输出分为 MAIN 和 AUX,并单独编号(MAINn和AUXn, n通常是从1到6或8)。
注意
飞行控制器可能只有MAIN 输出, (比如 Pixhawk 4 Mini),也可能只有6个MAIN 或 AUX输出。 确保您选择的控制器有足够的端口/输出接口适应您的机架。
通常情况下, MAIN 端口用于核心飞行控制。 AUX 用于非关键执行器/载荷(但是,比如VTOL机型,如果 MAIN没有足够的接口, AUX也可能用来做飞行控制)。 例如, 通用四旋翼 用 MAIN 输出的 1-4 来控制电机,其余的 MAIN 和AUX 输出可以用来做 RC 透传。
它们也可能被标记为 FMU PWM OUT 或 IO PWM Out (或类似)。 Pixhawk 控制器又一个 “主” FMU 和可能存在的 独立的 IO 板。 如果有IO 板, AUX 端口直接连接到 FMU 和 MIAN 端口连接到IO板。 否则, MAIN 端口已连接到FMU,没有 AUX 端口。 FMU输出端口可以使用 D-shot 或 One-shot 协议 (当然也有 PWM), 它们的延迟低很多。 这对于需要更好性能的穿越机和其他机体来说是有用的。
输出端口也可以映射到 UAVCAN节点 (例如,UAVCAN 电机控制器)。
备注:
MAIN 和 AUX 中仅有6-8个输出,因为大多数飞行控制器只有这么多的 PWM/Dshot/Oneshot 输出。 理论上来说,如果总线支持,可以有更多的输出(比如UAVCAN就不限于这几个节点)。
电调 & 电机
许多 PX4 无人机使用无刷电机,其由飞行控制器通过电子调速器(ESC)驱动(ESC将来自飞行控制器的信号转换为合适的驱动电平,传递给电机)。
电池/电源
PX4 无人机通常由锂聚合物(LiPo)电池供电。 电池通常使用电源模块或电源管理板连接到系统,它为飞行控制器和 ESC提供单独的动力。
无线电控制(遥控)
遥控(RC)系统用于手动控制机体。 它由一个遥控装置组成,使用发射机来与飞行器上的接收机通信。 一些RC系统还可以接自动驾驶仪传回的收遥测信息。
PX4 在自主飞行模式中不需要遥控系统。
安全开关
机体通常必须有一个 安全开关,然后才能使用 解锁(解锁后,电机会供电,螺旋桨开始旋转)。 通常,安全开关被整合到GPS设备中,但也可能是一个单独的物理组件。
注意
解锁后的机体是有潜在危险的。 安全开关是防止意外解锁发生的一个附加机制。
数传电台
数传电台可以在诸如QGC地面站与运行 PX4 的机体之间提供无线 MAVLink 连接。 这使得飞机飞行中调试参数、实时检查遥测信息、更改任务等等成为了可能。
机载计算机
PX4 可以通过串行接线或 WiFi 由独立的机载伴飞计算机进行控制。 机载计算机通常使用 MAVLink API(如 MAVSDK 或 MAVROS)进行通信。
SD卡(可移除储存器)
PX4 使用 SD 储存卡存储 飞行日志,而且还需要内存卡才能使用 UAVCAN 外围设备,运行 飞行任务。默认情况下,如果没有 SD ,PX4 将在启动时播放格式化失败(2-声短响) 两次(且上述需要储存卡的功能都不可用)。
提示
Pixhawk 飞控板支持的最大 SD 卡大小为 32 GB 。 强烈推荐使用SanDisk Extreme U3 32GB 。
SD 卡在某些情况下也是可选的。 不包含 SD 卡槽的飞行控制器可以:
使用参数 CBRK_BUZZER 禁用通知蜂鸣器。
推流日志 到另一个组件(机载计算机)。
在 RAM/FLASH 中储存任务。
解锁和加锁
机体是有可活动的部件的,其中一些在通电后会有潜在的危险性(特别是电机和螺旋桨)!
为了减少事故概率:
当不在使用时, PX4机体是加锁状态的(未供电的),必须在起飞前进行解锁。
解锁默认情况下(美国手遥控器)可以通过保持遥控油门+ YAW 摇杆到右下角一秒钟来解锁,要想加锁,则保持摇杆在左下角。 还可以使用遥控上的按钮来配置 PX4 解锁(也可以从地面站发送解锁命令)。
飞行模式
飞行模式为用户(飞手)提供不同类型/级别的飞行器自动化和自动驾驶辅助。
自主模式完全由自驾仪控制,无需飞手/遥控输入。 例如,它们可用于自动执行诸如起飞,返回 Home 点和着陆等常见任务。 其他自主模式执行预编程任务,跟随 GPS 信标,或接受来自机载计算机或地面站的命令。
手动模式 由用户(通过遥控控制杆/手柄)在自驾仪的协助下实现控制。 不同的手动模式可以实现不同的飞行特性 - 例如,某些模式可以实现特技动作,而其他模式则无法翻滚并且会抗风以保持位置/航向。
提示
并非所有的飞行模式都适用于所有飞行器,并且某些模式只能在满足特定条件时使用(例如,许多模式需要有定位信息)。
安全设置(故障保护)
PX4 具有可配置的故障安全系统,可在出现问题时保护和挽回您的飞行器! 这些允许您指定可以安全飞行的区域和条件,以及触发故障保护时将执行的操作(例如,着陆、保持位置或返回指定点)。
主要的故障保护事件如下:
低电量
遥控(RC) 信号丢失
位置信息丢失(全局位置估计质量太低)
机载计算机控制指令丢失(如与机载计算机失去连接)
数传信号丢失(如失去与 GCS 的遥测连接)
超出地理围栏 (限制飞行器在虚拟圆柱体内飞行)。
任务故障保护(防止先前的任务在新的起飞地点运行)。
空中交通避障(由来自如 ADSB 转发器的数据触发)。
有关详细信息,请参阅:安全(基本配置)。
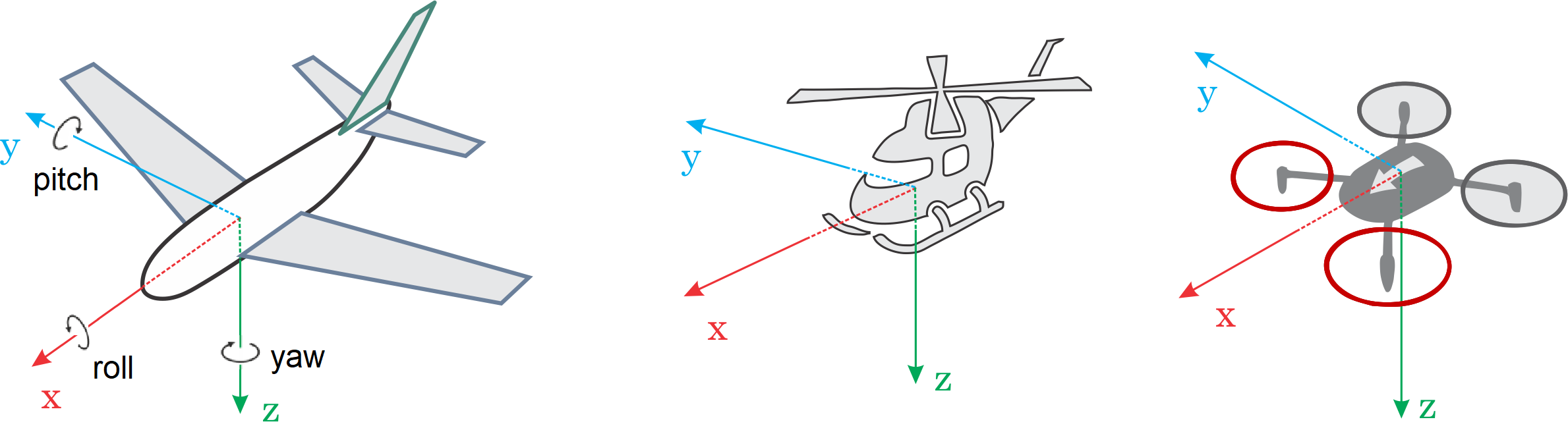
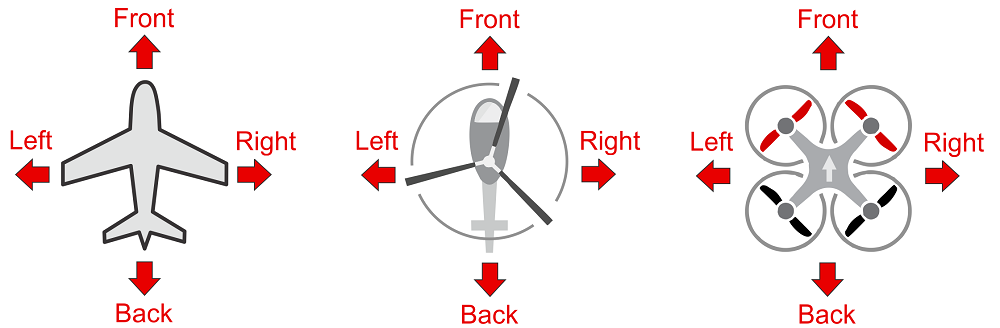
航向和运动方向
所有车辆,船只和飞机都具有航向(机头朝向)或基于其前进运动的方向。
注解
对于 VTOL Tailsitter 机头朝向是与多旋翼配置相关的(比如无人机在起飞,悬停,降落时的姿态)。
知道机体朝向,以使自驾仪与设备运动矢量对齐是重要的。 即使多旋翼从各个方向都对称,但其也有朝向! 通常制造商使用彩色螺旋桨或带颜色的机臂来表示朝向。
在插图中,我们将使用红色的前螺旋桨来显示多旋翼的航向。
载具选择
PX4支持空中,表面(地面,水面)以及水下载具。 您可以在机架参考中查看已经经过PX4测试/调整过的载具类型或及其变种。
选择何种机架取决于您需要用来做什么:
多旋翼. PX4有可以让它们很容易飞的模式,并且它们是最受欢迎的飞行器。
固定翼. 但是它们比多旋翼更难飞行和降落,并且如果您需要悬停或飞得很慢时,它们就不再合适(例如在勘测垂直建筑时)。
VTOL. 它们拥有二者(多旋翼和固定翼)优点:能够像多旋翼那样垂直起飞然后转变到像固定翼飞机那样向前飞行。 它们通常比多旋翼和固定翼更加昂贵,并且更难组装和调试。
飞艇/热气球是比空气轻的飞行器,通常提供高空长时间飞行,但是对飞行速度和方向的控制有限(或没有)。
无人车/船. 它们很容易控制,而且常常很有趣。
机架选择 :::
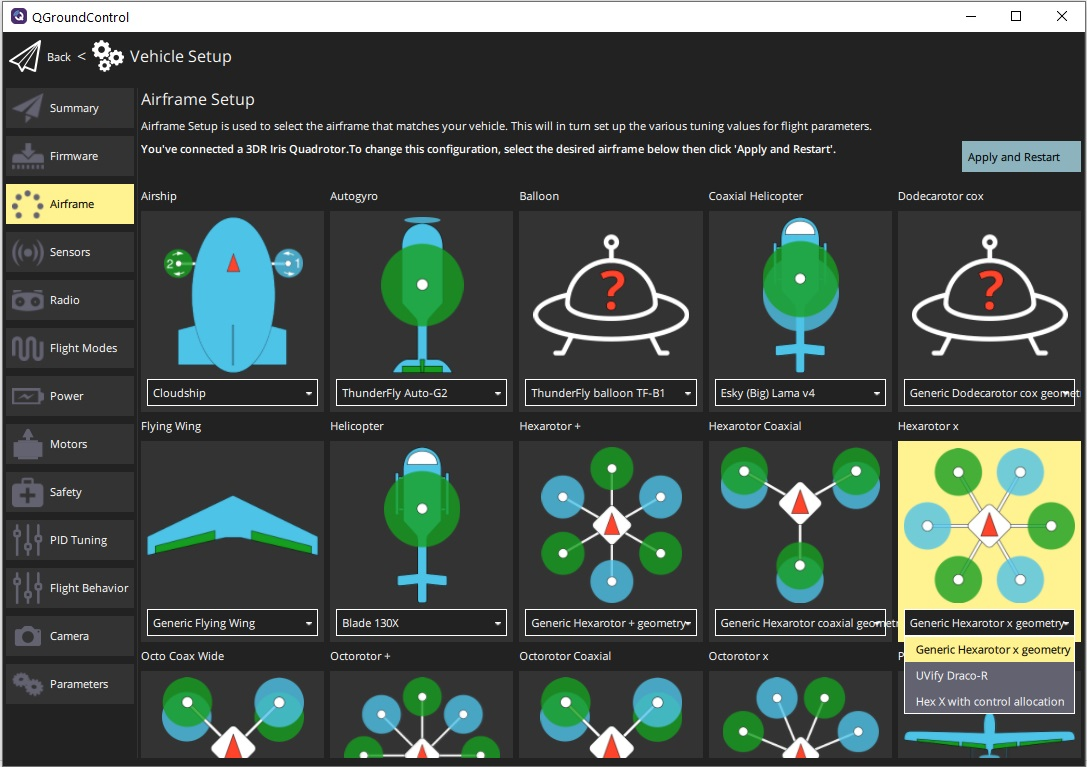
更多QGC使用说明参考: QGC地面站使用教程
传感器
遥控器
飞行模式
LED含义
Pixhawk系列飞行控制器 使用LED来显示当前飞行器的状态。
主LED
主LED指示飞行器的当前飞行状态就绪情况。这通常是一个最亮的I2C协议的LED灯,可以安装在飞行控制器板上,也可能安装在GPS上。
下图显示主LED和飞行器状态的关系。
| 蓝色常量 | 已解锁 无GPS |
|---|---|
| 绿色长亮 | 已解锁 有GPS |
| 紫色长亮 | 失控保护 |
| 琥珀色长亮 | 低电量 |
| 蓝色慢闪 | 已就绪 无GPS |
| 绿色慢闪 | 已就绪 有GPS |
| 红色快闪 | 错误 |
蓝色长亮:已解锁,无GPS:表示无人机已解锁并且GPS装置没有位置锁定. 当飞行器已经解锁,PX4会解锁对电机的控制,允许你操纵无人机飞行。 像往常一样,在解锁时要小心,因为大型螺旋桨在高速旋转时可能很危险。
蓝灯慢闪:未解锁,没有GPS:与上面类似,但您的无人机没有解锁。这意味着你将不能控制电机,但是其他子系统正在工作。
绿色长亮 : 已解锁,GPS 锁定:表示无人机已解锁并且具有来自GPS的有效位置锁定。当飞行器已经解锁,PX4会解锁对电机的控制,允许你操纵无人机飞行。 像往常一样,在解锁时要小心,因为大型螺旋桨在高速旋转时可能很危险。 在这种模式下,飞行器可以执行自主飞行任务。
绿色慢闪:未解锁,有GPS:与上面类似,但您的无人机没有解锁。这意味着你讲无法控制电机,但是其他子系统包括GPS位置锁正在工作。
紫色长亮:失控保护模式:每当飞行器在飞行过程中遇到问题时,例如失去手动控制、电池电量严重不足或内部错误,此模式就会激活。在故障保护模式时,飞行器将试图返回起飞位置,或者降落在当前位置。
琥珀色长亮:低电量警告:表示无人机的电池电量处于危险的低电量。在电量低于某一阈值之后,飞行器将进入故障保护模式。
红色快闪:错误/需要设置:表示您的自动驾驶仪在飞行前需要配置或校准。将飞行器连接到地面站以找出问题所在。 如果您已经完成设置过程,飞行器仍然闪烁红色,这表明还有其他错误。
从LED状态
三个状态LED提供FMU的状态,另外三个提供 IO的状态(如果存在)。 它们表示电量、驱动模式和状态以及错误。如下图

从上电开始,FMU和IO的CPU首先运行引导程序(BL) 然后运行程序(APP)。 下表显示了Bootloader 和 APP 如何使用 LED 指示状态。
| 颜色 | 标签 | bootloader使用 | APP使用 |
|---|---|---|---|
| 蓝色 | ACT(激活) | 引导bootloader接收数据的时候闪烁 | 表示ARM状态 |
| 红色/琥珀色 | B/E(在引导加载程序/错误) | 在引导bootloader时闪烁 | 表示错误状态 |
| 绿色 | PWR(电源) | 引导加载程序不使用 | 表示ARM状态 |
注解
上面所列的 LED 标签是常用的,但是在一些飞控板上可能有所不同。
下面给出了LED更详细的信息(“x”表示任意状态)
| 红色/琥珀色 | 蓝色 | 绿色 | 含义 |
|---|---|---|---|
| 10Hz | x | x | 超负载 CPU 负载 > 80%, 或 RAM 使用率 > 98% |
| 关闭 | x | x | CPU 负载 <= 80%, 或 RAM 使用率 <= 98% |
| 不可用 | 关闭 | 4Hz | 已解锁且失控保护 |
| 不可用 | 开启 | 4Hz | 已解锁且未失控保护 |
| 不可用 | 关闭 | 1Hz | 未解锁且当前可以解锁 |
| 不可用 | 关闭 | 10Hz | 未解锁且当前不可以解锁 |
蜂鸣器含义
https://docs.px4.io/main/zh/getting_started/tunes.html