when
- CVPR 2018
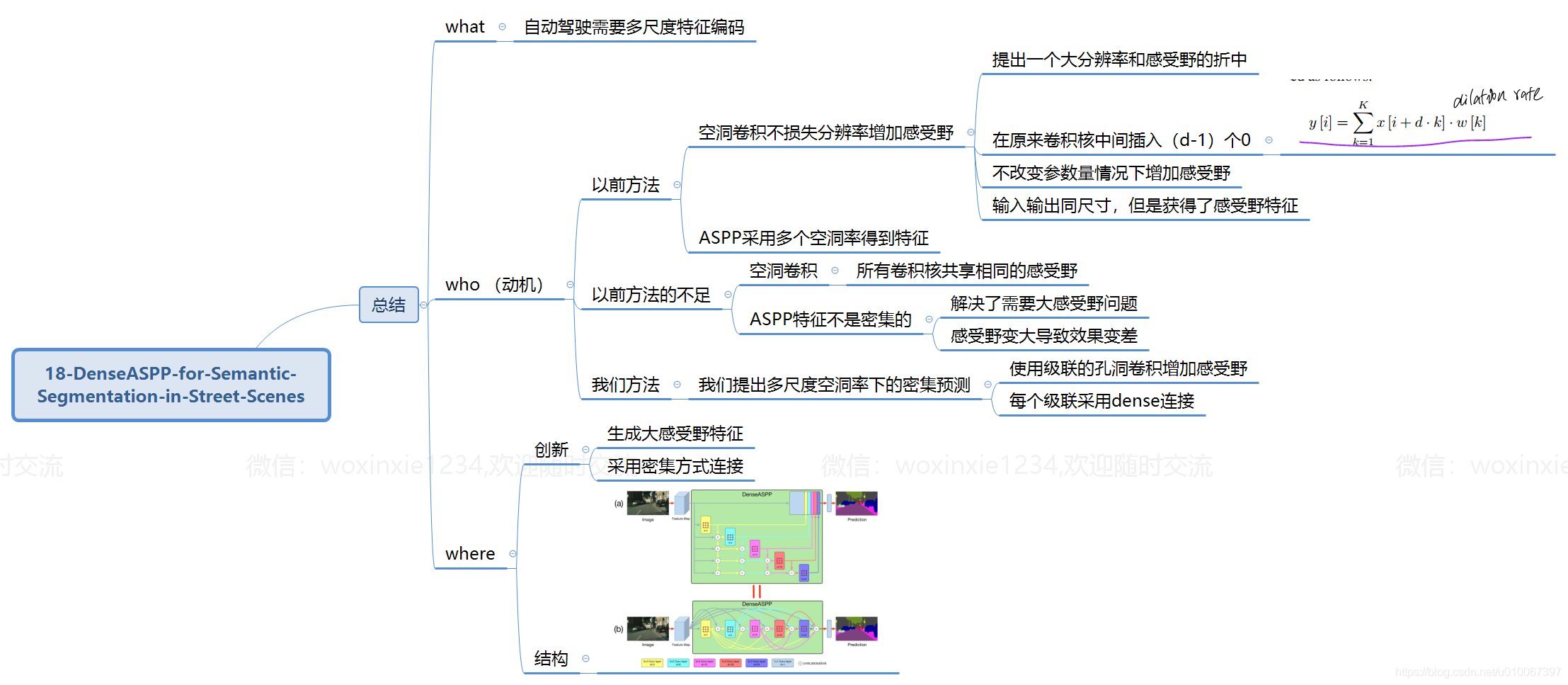
what
- 使用扩张卷积(Atrous Convolution)能够在不牺牲特征空间分辨率的同时扩大特征接收野,DeepLab系列工作结合多尺度信息和扩张卷积的特点提出了ASPP模块,将不同扩张率的扩张卷积特征结合到一起。
- ASPP模块在尺度轴上特征分辨率还不够密集,获取的接收野还不够大,
- 为此提出了DenseASPP(Densely connected ASPP),以更密集的方式连接一组扩张卷积,获得了更大的范围的扩张率,并且更加密集。
- 在没有显著增加模型大小的情况下,DenseASPP在CityScapes上达到了State-of-the-art的表现。
who (动机)
-
扩张卷积用于解决特征图分辨率和接收野之间的矛盾,ASPP利用了多尺度信息进一步强化了分割效果。DeepLabv2中的ASPP模块如下:

- 但是在自动驾驶等领域有高分辨率的输入,ASPP为了获取足够大的感受野需要足够大的扩张率,但随着扩张率增加(d>24),扩张卷积的衰退衰减无效了(DeepLabv3中分析过这个问题)。
-
DenseNet
- DenseNet中用密集连接获得更加的性能:
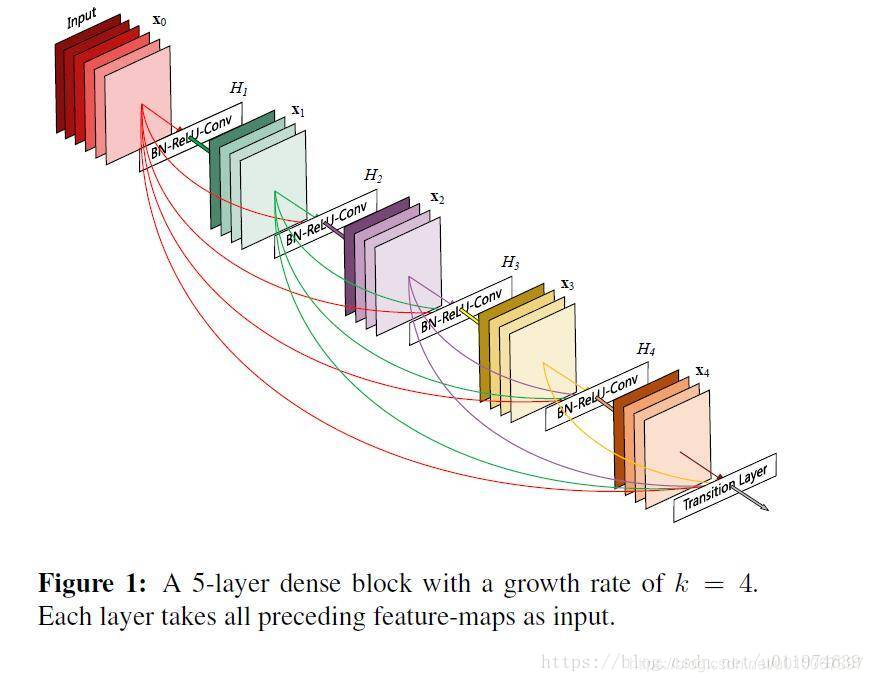
- 但因为密集连接,特征的通道数会急速上升,DenseNet中使用1×1的卷积用于降低通道数,限制了模型大小和计算量,同样的,在本文中也使用了多个1×1卷积用于降低参数,限制计算量。
-
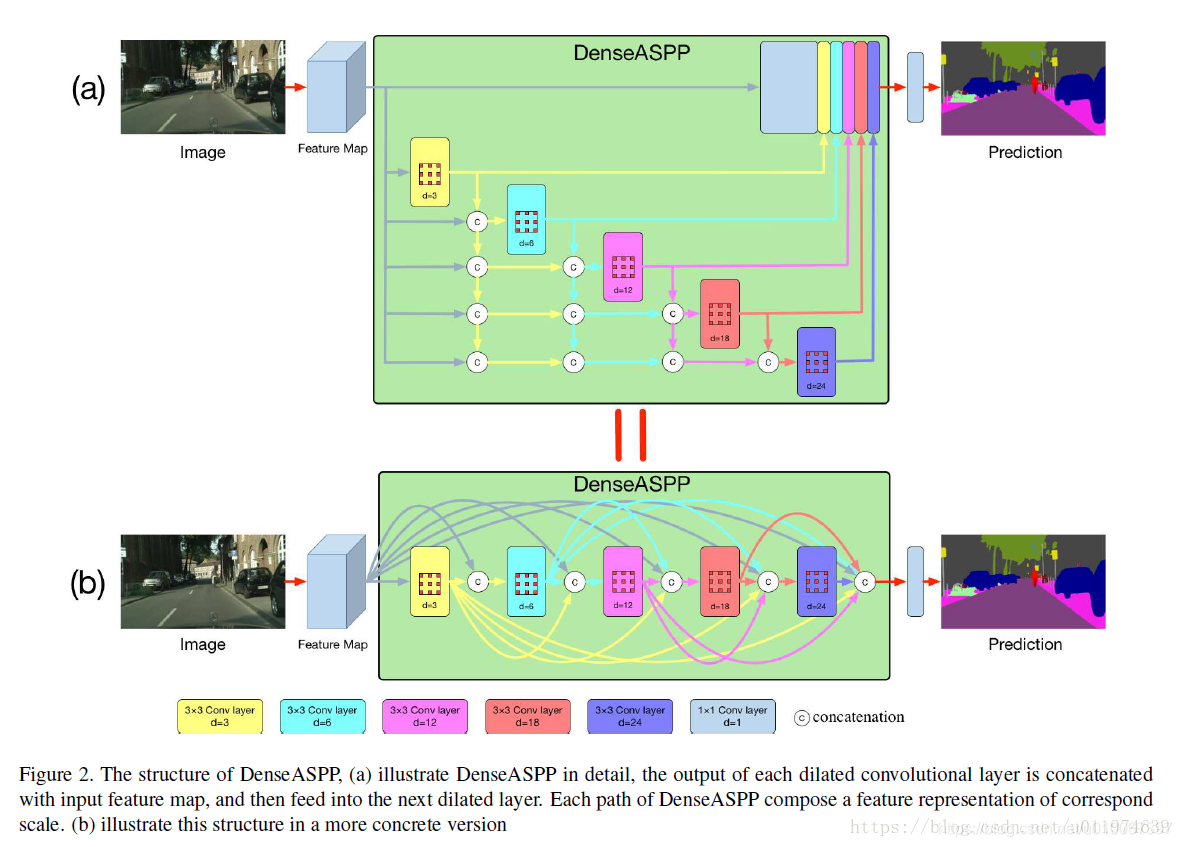
DenseASPP
-
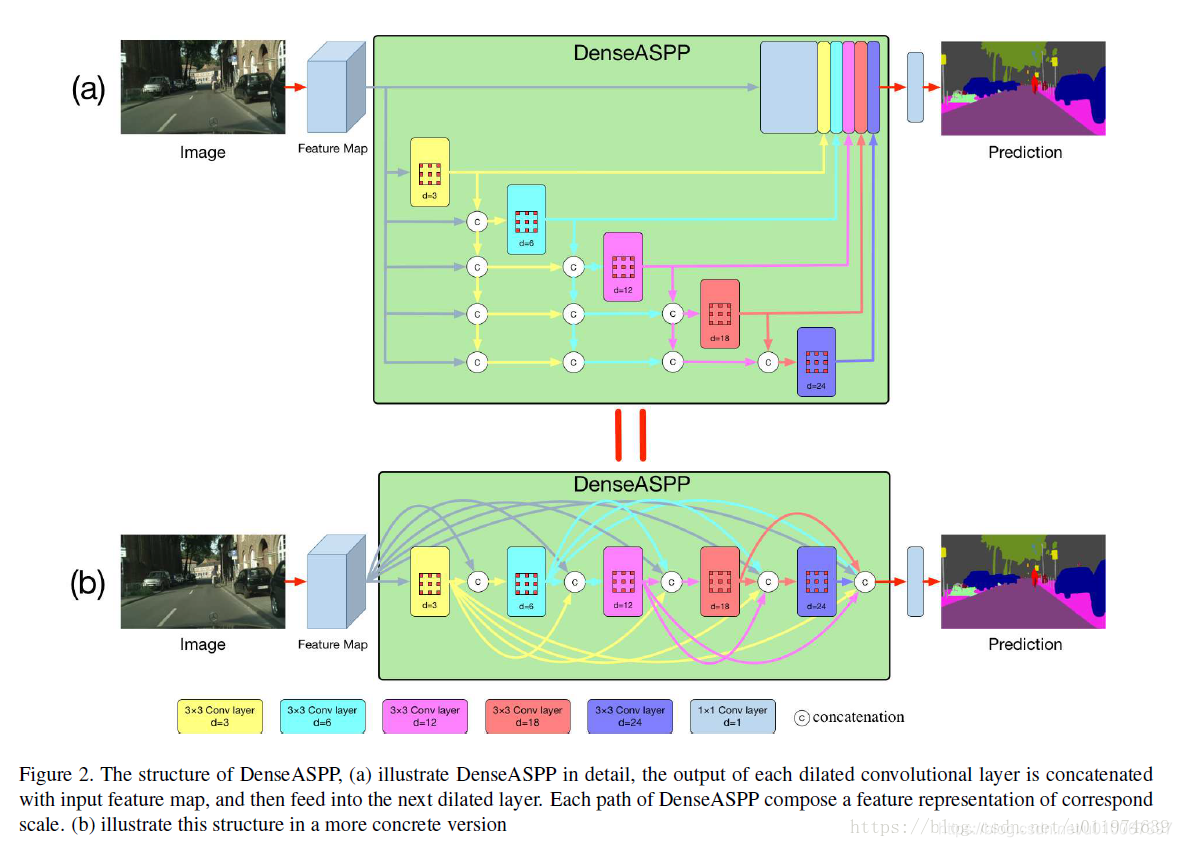
论文提出的DenseASPP用于解决街道场景的尺度挑战,DenseASPP包含了一个基础网络,后面接了一个多级的扩张卷积层,如下图所示:
-
使用密集连接的方式将每个扩张卷积输出结合到一起,论文使用了较合理的扩张率(d<24),通过一系列的扩张卷积组合级联,后面的神经元会获得越来越大的感受野,同步也避免了过大扩张率的卷积导致的卷积退化。
-
并且通过一系列的扩张卷积组合,特征图上的神经元对多个尺度的语义信息做编码,不同的中间特征图对来自不同尺度的信息做编码,DenseASPP的最终输出特征不仅覆盖了大范围的语义信息,并且还以非常密集的方式覆盖了做了信息编码。
-
where
创新点
- DenseASPP能够生成覆盖非常大的范围的接收野特征
- DenseASPP能够以非常密集的方式生成的特征
需要注意的是,上述两个特性不能通过简单的并行或级联堆叠扩张卷积实现。
以前的工作
-
深度卷积神经网络为了获取更大感受野的特征会使用下采样(或池化),但这会降低特征的分辨率,虽然获得特征的内部不变性但丢失了很多细节。DeepLab系列使用了扩张卷积获取更大感受野的同时保持图像的分辨率,并进一步提出了ASPP模块结合了多尺度信息,与此类似有PSPNet结合了不同尺度的池化信息。论文提出的DenseASPP结合了平行和级联的扩张卷积优点,在更大范围内生成更多尺度的特征。
-
DenseASPP是DenseNet的特例,可以看做是所有扩张率设置为1,这分享了DenseNet的优点,包括缓解了梯度消失的问题和大幅度减少参数。
how
Dense Atrous Spatial Pyramid Pooling
-
在城市交通道路环境中,存在不同尺度的目标物,这需要捕获不同尺度的特征,DeepLabv3给出了两个策略:
- backbone:级联的扩张卷积(这和DRN,HDC是一个思想),逐渐获取到大的感受野特征
- ASPP:同一输入上并行的扩张卷积组合,将输出级联到一起
-
论文使用HK,d(x)表示一个扩张卷积,ASPP表示如下:
Denser feature pyramid and larger receptive field
- DenseASPP的结构如下:
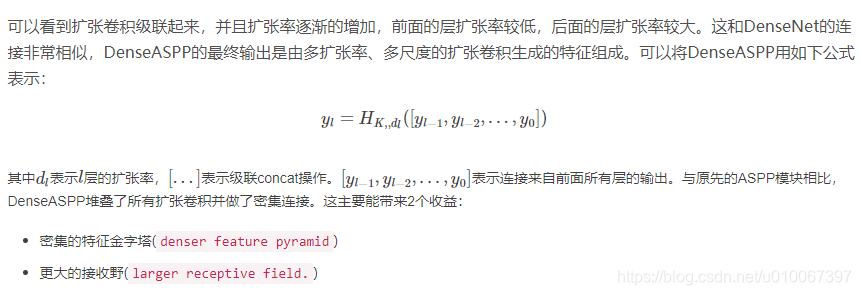
Denser feature pyramid
{kind=link}
-
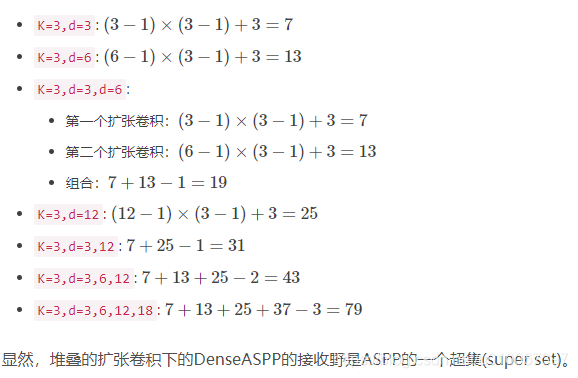
这么大的接收野条件下,只有3个像素被采样了用于计算,这样的情况下二维的情况下会更严重,虽然得到了更大的接收野,但是在计算的过程中丢弃了大量的信息。
-
上图(b)是扩张率3和扩张率为6的组合,和原先的扩张率为6的卷积(a)相比,(b)有7个像素参与了计算,计算更加密集。这在二维的情况下©有49个像素有助于计算。较大扩张率的卷积可从较小扩张率卷积中获得帮助,使得采样更为密集。
-
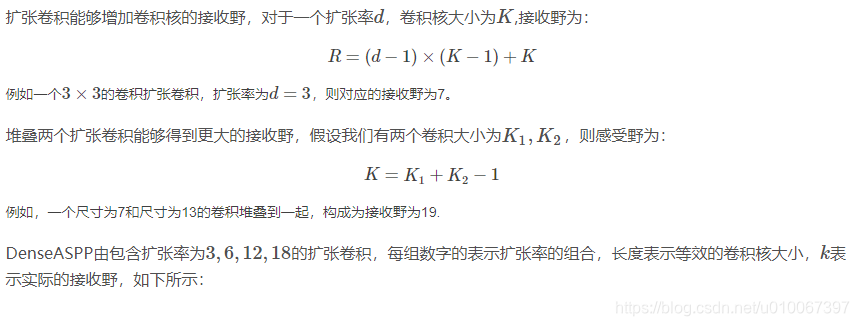
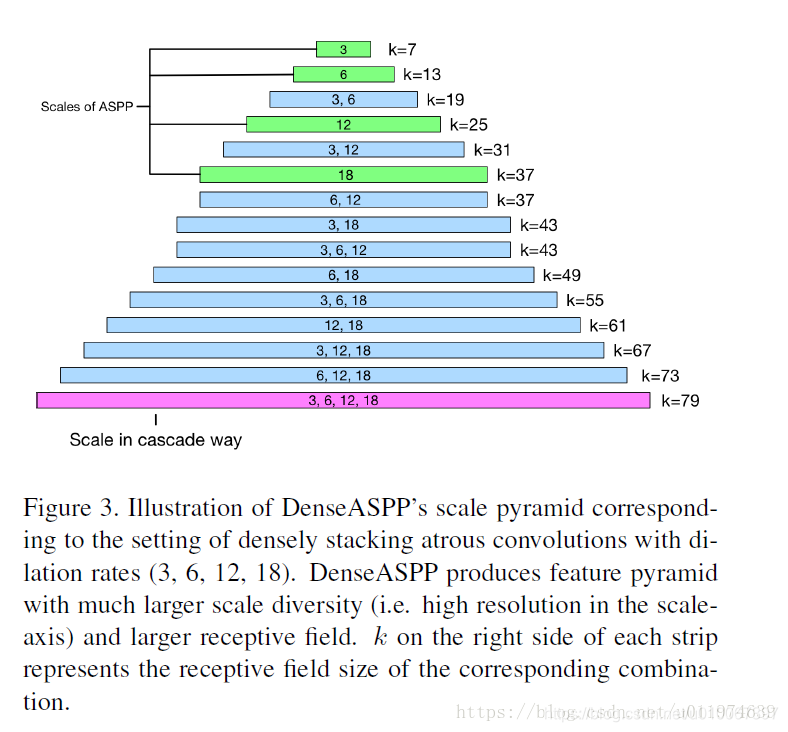
Larger receptive field

{kind=link}

{kind=link}
how much
- 论文在CityScapes上测试,评价标准为mIoU.
实现细节
- 论文在PyTorch上实现,基本主干是在ImageNet上预训练,论文移除了后面两个池化层和分类层,对后面的层使用可扩张率为2和4的扩张卷积(这和DRN的处理方式一样)。修改后的ConvNet的输出是原输入的1818,后面接DenseASPP然后上采样与ground truth做cross entropy。
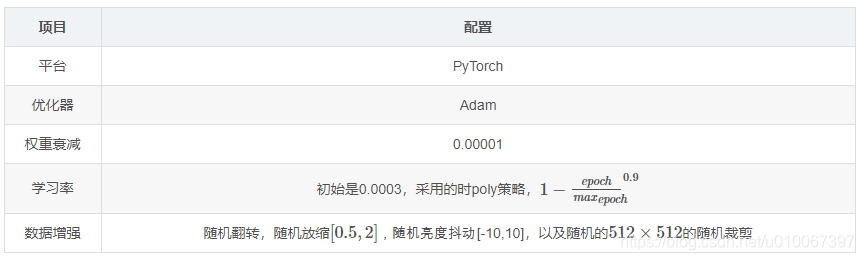
- 所有的模型使用batch=8,跑了80个epoch,每轮的BN参数是统一更新的。
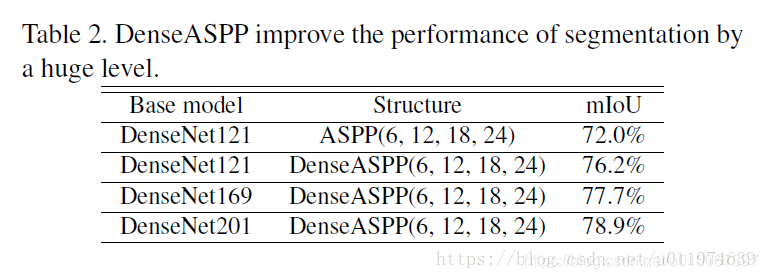
DenseASPP
-
论文使用了ResNet101为主干,配合DenseASPP(6,12,18,24)模块,在验证集上的结果如下,可以看到DenseASPP显著的提升了结果:
-
部分的可视化结果如下:

Detailed study on DenseASPP components
- 不同的DenseASPP设置得到的结果如下:

可以看到大概的趋势是随着接收野的增大,性能也提升。直到接收野到128后逐渐下降。
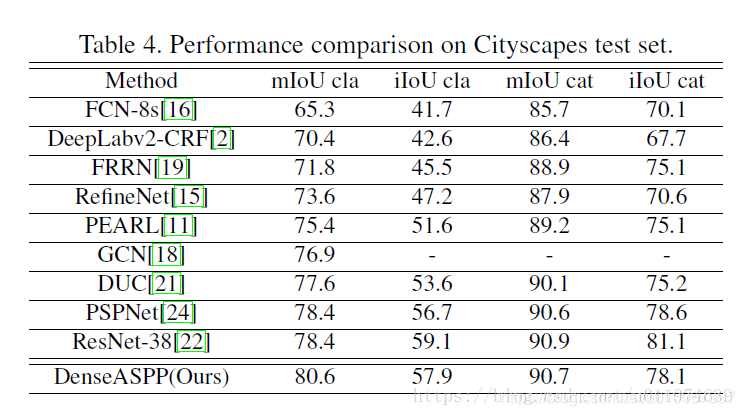
Comparing with state-of-the-art
- 论文在DenseNet161的基础上在精标签的数据上做训练,使用了多尺度{0.5,0.8,1.0,1.2,1.5,2.0}{0.5,0.8,1.0,1.2,1.5,2.0},与现有的先进模型对比,最终的结果如下: