版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/gpeng832/article/details/77658886
首先说一下我的心得:
1. 我认为KDL的精髓是Spatial Vector,结合C++等面向对象的语言可以写出较好的软件。
2. 直接阅读KDL代码不适合初学者学习机械臂动力学。
3. 要学习机械臂动力学的话应首先阅读使用3维向量推导公式的文献,也就是线速度和角速度独立分析。
4. 掌握机械臂动力学的原理之后再考虑如何将其写成代码,顺序不能错,否则会很吃力。
5. 机械臂动力学涉及到刚体运动学、刚体动力学、矩阵分析、李群和螺旋理论等。
一、3维向量和6维向量
KDL中的算法大多是参考的《Rigid Body Dynamics Algorithms》这本书中的方法,它提出了Spatial Vector—是将3维的线性运动(力)和3维的旋转运动(力)组合起来的6维向量。这种组合可以极大地减小代数运算量,并且可以使代码更短、更清晰、更方便阅读和调试,所以这种程序适合用C++这种面向对象的语言来写。
Spatial Vector的种类:
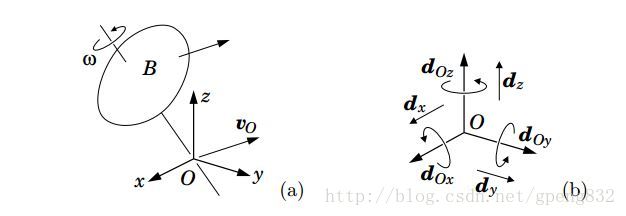
Spatial Velocity:
v^O=[wxwywzvoxvoyvoz]T=[wvO]
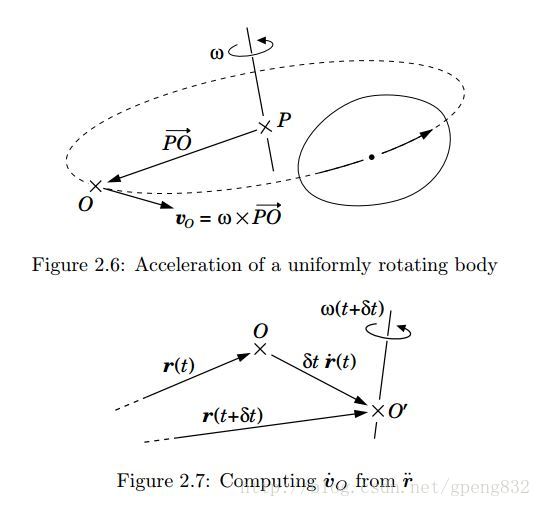
Spatial Acceleration:
a^O=ddt[wvO]=[w˙v˙O]
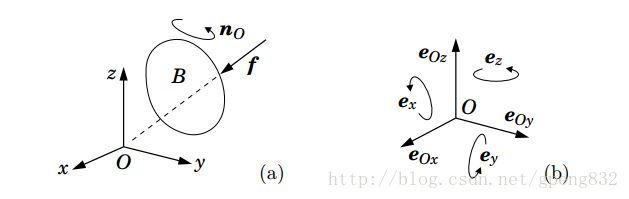
Spatial Force:
f^O=[noxnoynozfxfyf]T=[nof]
Spatial Momentum:
h^O=[hOh]=[I¯Cw+r×mvCmvC]
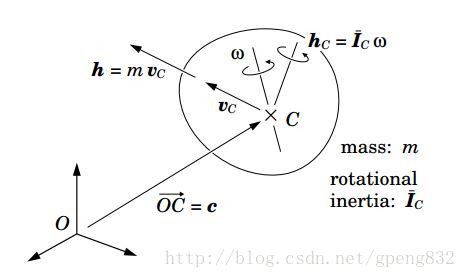
Spatial Inertia tensor:
IO=[I¯C+Mr×r×Tmc×Tmc×m1]
二、牛顿欧拉法的数学基础
刚体的运动方程,将牛顿方程和欧拉方程结合:
f=ddt(Iv)=Ia+(v×∗I−Iv×)v=Ia+v×∗Iv
其中定义的一些运算符:
⎡⎣⎢xyz⎤⎦⎥×=⎡⎣⎢0z−y−z0xy−x0⎤⎦⎥
,
v×∗=[w×0v×w×]
,
v×=[wv]×=[w×v×0w×]
,
IOa=[I¯C+mc×c×Tmc×Tmc×m1][w˙Ov˙O]
[wvO]×[mmO]=[w×mw×mO+vO×m]
[wvO]×∗[fOf]=[w×fO+vO×fw×f]
vi=vi−1+siq˙i
(以基坐标为参考系,连杆i质心的速度)
ai=ai−1+siq¨i+vi×siq˙i
(以基坐标为参考系,连杆i质心的加速度)
vi=iXi−1vi−1+iXi−1siq˙i
(以连杆i坐标系为参考系,连杆i质心的速度)
ai=iXi−1ai−1+iXi−1siq¨i+vi×siq˙i
(以连杆i坐标系为参考系,连杆i质心的加速度)
fi=Iiai+vi×∗Iivi−fexternal
(以连杆i坐标系为参考系,关节i传递给连杆i的力)
τi=sifi
(为了产生
fi
,关节i需要输出的力矩或力)