4.1 Belief state in 2D
4.1.1 Introduction
How robots can keep track of where they are in space and time using these particle filter algorithms to represent their uncertainty.
1) explore how robots represent the pose, that is where they're located and how they can estimate this over time using a localization algorithm.
2) given a map, how can we use the information in the map to help us build up this registration of the pose to the map;
3) explore a canonical algorithm called the particle filter which robots can use to estimate their localization information using sensors.
4.1.2 Odometry Modeling
几种常见的定位方式
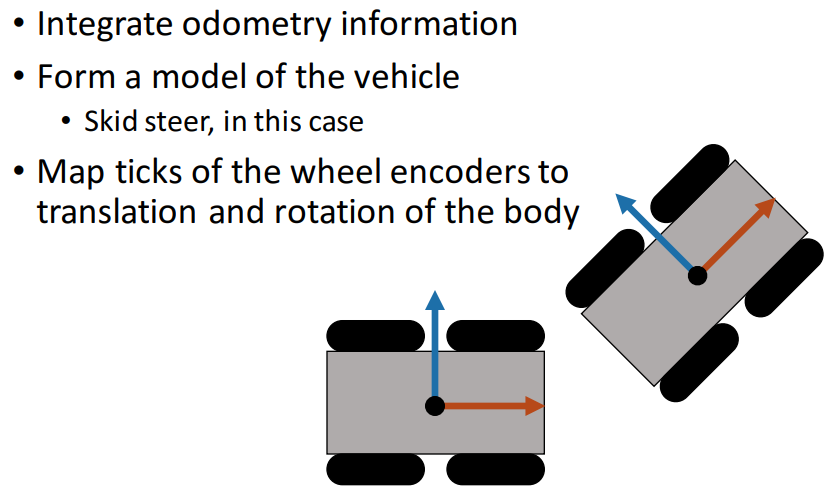
里程计更新方式与机器人模型相关。
以差速小车为例子,介绍一种简单的里程计实现方法。
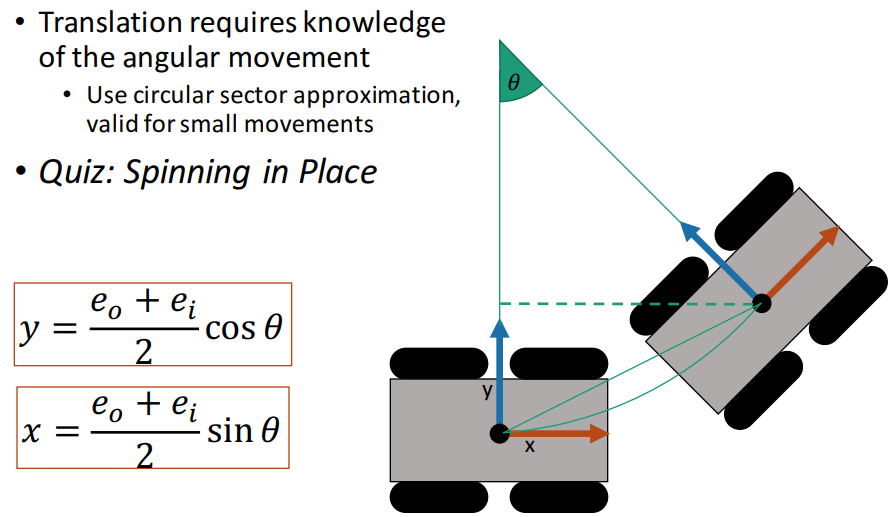
从编码器可以读取内、外侧轮子的运动距离,即机器人转弯的内、外弧长;结合已知的内外侧轮子距离,可以计算转弯角度。
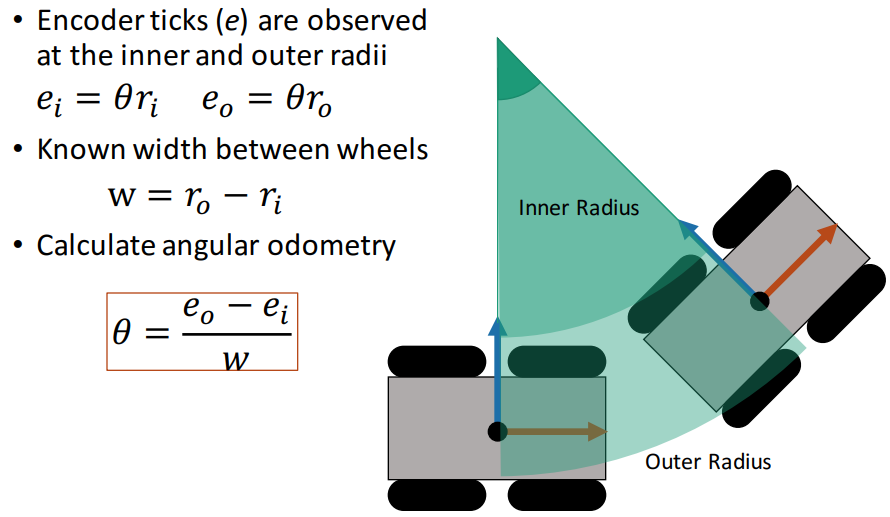
计算内、外弧长的平均值作为机器人坐标系的弧长,并近似为扇形边的长度。
x、y的计算公式善存疑问。
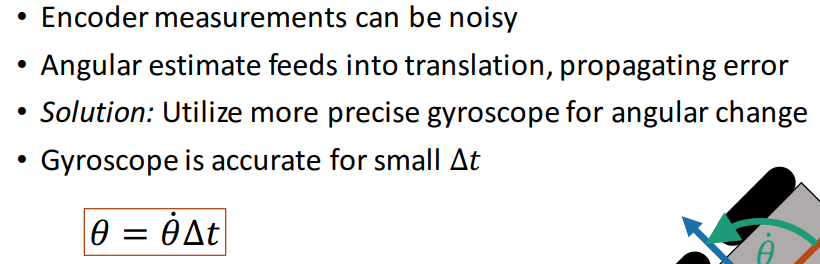
由于轮子滑移,结合陀螺仪计算机器人的转弯角度