《机器人学导论–Join J.Craig》第一章 绪论
1.1 背景
1. 机器人取代人:人工成本原来越高,工业机器人的成本越来越低,且无需人工那些福利、待遇等,属于一本万利。随着工业机器人越来越便宜,功能越来越强大,一些重复性、需要大量劳力的工作,将会被机器人越来越多的从事。
2. 机器人:多次编程,可完成多种复杂工作;专用的自动化装备:可编程,但主要功能被限定用来执行同一类型的任务。
1.2 术语
位姿:物体相对于某个坐标系的位置和姿态。
运动学:研究物体的运动,如位置、速度、加速度等,而不考虑引起这总运动的力。
连杆、关节、关节角、关节偏距:机械臂有连杆组成,相邻连杆由科作相对运动的关节连接。转动关节的位移称为关节角;滑动或者移动关节的位移是直线运动,此位移称关节偏距。
自由度:操作臂中具有独立位置变量的数目,通常每个关节位置都由一个独立的变量定义,因此关节数目等于自由度数目。
末端执行器:安装在操作臂的自由端。根据应用场景的不同,末端执行器可以是夹具、焊枪、电磁铁或者其他装置。
工具坐标系附着于末端执行器,用于描述操作臂的位置。
基座标系是与操作臂固定底座相连。工具坐标系与基座标系如图1-6。
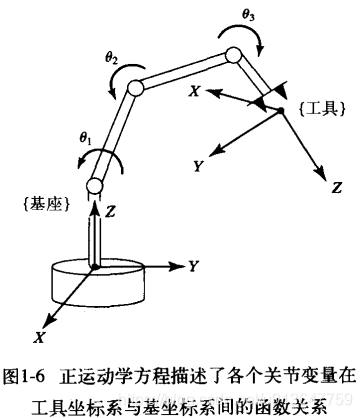
操作臂正运动学:
给定一组关节角的值,计算工具坐标系相对于基座标系的位姿,即操作臂位置由关节空间描述换算到笛卡尔空间描述。这是静态的几何问题。通俗的说,就是给定各个关节的参数,计算末端执行器的位姿。
操作臂逆运动学:
给定操作臂末端执行器的位姿,计算所有可达给定位姿的关节角(重要且实际)。通俗的说,就是给定末端执行器的位姿,问各个关节的参数。
雅克比矩阵:
定义了从关节空间速度向笛卡尔空间速度的映射,隋操作臂位形的变化而变化。用于对操作臂进行机构的速度分析。
奇异点与退化(书上讲的太经典!!!):

动力学:
主要研究产生运动所需要的力。通过关节驱动器产生一组复杂的力矩函数来实现末端执行器从加速到恒速,最后减速停止的运动。
动力学方程一个作用是用于操作臂的运动控制,另一个就是操作臂的运动进行仿真。
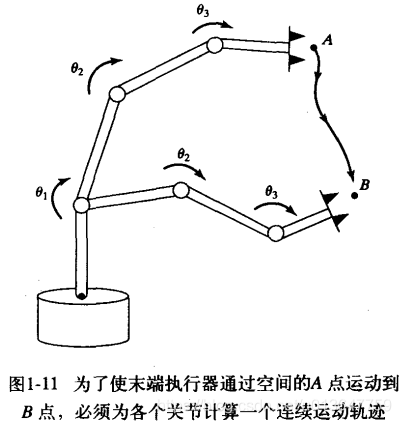
轨迹生成:
平稳控制操作臂从一点运动到另外一点,通常是使每个关节按照指定的时间连续函数来运动。轨迹生成就是如何准确计算出这些运动函数。
线性位置控制
机械臂由驱动器提供力或力矩,用于产生期望运动的力矩由动力学算法来计算,同时需要位置控制系统的控制算法对位置、速度传感器检测,以计算驱动器的力矩指令。
力控制
末端执行器在平面进行运动时,需要力-位置混合控制系统。力控制是操作臂控制力的能力的控制方法。
可编程机器人
“柔性”,指可编程的意思。
TCP(工具中心点)
操作者将操作臂手部上(或抓持器上)的一个特殊点指定为操作点(TCP),通过操作点相对于用户坐标系的期望位置来描述机器人的运动。
离线编程与仿真
机械臂的编程与生产分离,可在机械臂的生产过程中记性编程,两者不相互影响。
1.3 符号



所思所想,所感所悟,共同成长。cgrowth.