在一个三维空间里,我们知道要表征一个完全自由的坐标系共需要6个自由度:
- 三个用来表征姿态(orientation)roll-pitch-yaw
- 三个用来表征位置(position) x-y-z
如此来说,对于一个有n个连杆的机械臂,要描述每个连杆的位姿(位置+姿态)应该要6个参数才对,那么要描述整个机械臂就需要6n个参数,可为什么DH参数法里面每根连杆只用了四个就描述完全了?
这是因为我们在按照DH参数法定义坐标系的时候,潜移默化的默认了两个限制条件。我们看下图a,b,c这三个坐标系
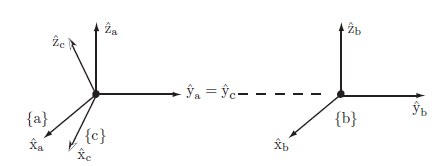
a经过绕y轴的旋转变成c,c经过y轴方向上的平移成为b。现在尝试一下用我们所学的D-H法描述b和c坐标系看看?
描述不出来
不光这两个转换描述不出来,任何绕y轴的旋转和沿着y轴的平移的组合都没办法用DH方法描述。
提取出核心条件描述就是:
- 条件一:下一个坐标系的x轴必须垂直于上一个坐标系的z轴
- 条件二:下一个坐标系的x轴必须与上一个坐标系的z轴相交
正是因为这两个限制条件决定了我们可以只用4个参数完全描述新的坐标系。现在你可以放心大胆的使用DH法了