正解与逆解的求解需要相应的机器人运动方程,其中关键的就是DH参数表
DH参数表用来描述机器人各关节坐标系之间的关系,有了DH参数表就可以在机器人各关节之间进行坐标转换
求解正解就是从关节1到关节5的坐标转换
基本知识 :
关节:连接2个杆件的部分
连杆长度 :2个相邻关节轴线之间的距离
连杆扭角 :2个相邻关节轴线之间的角度
连杆偏距 :2个关节坐标系的X轴之间的距离
关节角度 :关节变量 计算时需要加初始角度偏移
坐标系Z轴确定规则:
如果关节是旋转的,Z轴按右手定则大拇指指向为正方向。
如果关节是滑动的,Z轴沿直线运动方向的正方向。
连杆长度D为关节变量。
X轴确定规则:
情况1:两关节Z轴既不平行也不相交
取两Z轴公垂线方向作为X轴方向。
情况2:两关节Z轴平行
此时,两Z轴之间有无数条公垂线,可挑选与前一关节的公垂线的一条公垂线
情况3:两关节Z轴相交
取两条Z轴的叉积方向作为X轴(叉积:向量积)
Y轴确定原则:右手定则
变量选择规则:
用a角表示绕Z轴的旋转角(绕z轴关节旋转),d表示在Z轴上两条相邻公垂线之间的距离(沿x轴关节偏移量)
b表示每一条公垂线的长度(沿z轴关节偏移量),角y表示两个相邻Z轴之间的角度(绕x轴关节旋转),
也叫关节扭转。通常情况下,角a,d是关节变量
对于矩阵乘法的认知:机械臂矩阵变换的先后顺序严重影响结果,因为矩阵乘法一般不满足交换律;
矩阵变换:
机械臂的矩阵变换分为两个部分,分别是旋转变换和平移变换。
矩阵平移变换:
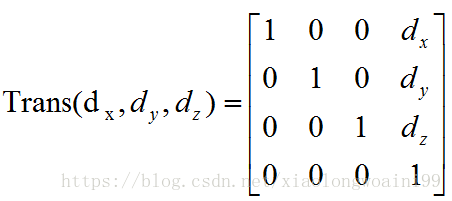
dx,dy,dz是从原始坐标原点,移动到新的坐标原点,在原坐标系的基础上,所经历的x,y,z方向的距离
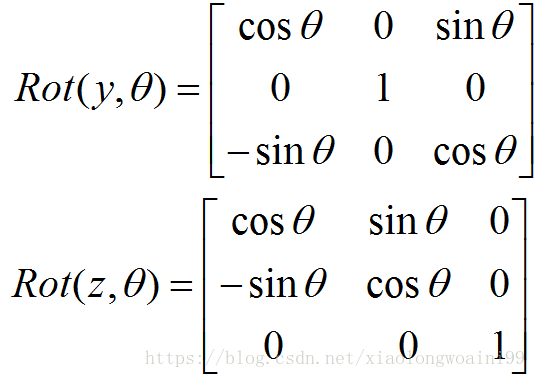
矩阵旋转变换:(崔,回复博客联系我,勿让杨知道,切记)

https://wenku.baidu.com/view/ba354fcaf46527d3250ce09c.htmlrec_flag=default&mark_pay_doc=2&mark_rec_page=1&mark_rec_position=1&mark_rec=view_r_1&clear_uda_param=1&sxts=1525314328902