PID练习
clc;
clear
N = 100;
x = linspace(-3*pi,3*pi,N);
% 目标值
% target_val = 20*ones(1,N);
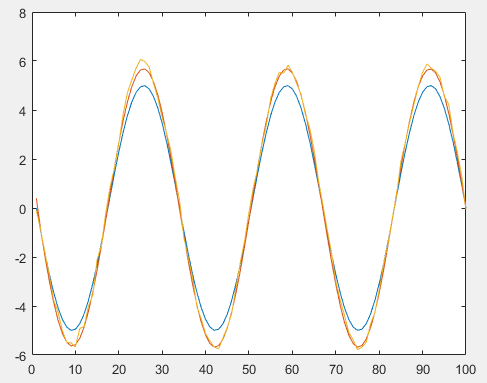
target_val = 5*sin(x);
% 当前值
current_val =2;
% PID 临时变量
integral = 0;
last_err = 0;
% PID 增益参数
Kp = 0.2;
Ki = 0.1;
Kd = 0.5;
% 过程输出变量 方便绘图
PID_data = [];
PID_data_noise = [];
% 无噪声 100% 感知 100% 控制
for i = 1:N
% 计算偏差 err
err = target_val(i) - current_val;
% 对偏差积分
integral = integral + err;
% 对偏差微分
d_err = err - last_err ;
% PID 比例+积分+微分 = 输出控制量
u_out = Kp * err + Ki * integral + Kd * d_err;
% 在控制量u_out的作用下 当前值转移到下一个状态
current_val = current_val + u_out;
% 数据保存
PID_data(i) = current_val;
end
% figure (1)
% plot([target_val' PID_data'])
% 传感器带噪声 measure_noise = rand() u_noise = rand()
current_val = 0;
for i = 1:N
err = target_val(i) - current_val;
% 传感器加噪声measure_noise
measure_noise = 0.2*rand();
err = err + measure_noise;
integral = integral + err;
d_err = err - last_err ;
u_out = Kp * err + Ki * integral + Kd * d_err;
% 控制加噪声 u_noise
u_noise = 0.5*rand();
u_out = u_out + u_noise;
current_val = current_val + u_out;
PID_data_noise(i) = current_val;
end
% figure (2)
plot([target_val' PID_data' PID_data_noise'])
C语言版本
#include <stdio.h>
#include<math.h>
// PID 参数结构体
struct _pid {
int pv; /*integer that contains the process value*/ //当前值
int sp; /*integer that contains the set point*/ //目标值
float integral; // 累计积分项
float pgain; // 比例系数
float igain; // 积分系数
float dgain; // 微分系数
int deadband; // 死区
int last_error; // 上一时刻偏差
};
// 全局变量
struct _pid warm,*pid;
int process_point, set_point,dead_band;
float p_gain, i_gain, d_gain, integral_val,new_integ;;
/*------------------------------------------------------------------------
pid_init
DESCRIPTION This function initializes the pointers in the _pid structure
to the process variable and the setpoint. *pv and *sp are
integer pointers.
------------------------------------------------------------------------*/
void pid_init(struct _pid *warm, int process_point, int set_point)
{
struct _pid *pid;
pid = warm;
pid->pv = process_point;
pid->sp = set_point;
}
/*------------------------------------------------------------------------
pid_tune
// PID 结构体参数设置
DESCRIPTION Sets the proportional gain (p_gain), integral gain (i_gain),
derivitive gain (d_gain), and the dead band (dead_band) of
a pid control structure _pid.
------------------------------------------------------------------------*/
void pid_tune(struct _pid *pid, float p_gain, float i_gain, float d_gain, int dead_band)
{
pid->pgain = p_gain;
pid->igain = i_gain;
pid->dgain = d_gain;
pid->deadband = dead_band;
pid->integral= integral_val;
pid->last_error=0;
}
/*------------------------------------------------------------------------
pid_setinteg
// pID 结构体积分项增益系数设置函数接口
DESCRIPTION Set a new value for the integral term of the pid equation.
This is useful for setting the initial output of the
pid controller at start up.
------------------------------------------------------------------------*/
void pid_setinteg(struct _pid *pid,float new_integ)
{
pid->integral = new_integ;
pid->last_error = 0;
}
/*------------------------------------------------------------------------
pid_bumpless
DESCRIPTION Bumpless transfer algorithim. When suddenly changing
setpoints, or when restarting the PID equation after an
extended pause, the derivative of the equation can cause
a bump in the controller output. This function will help
smooth out that bump. The process value in *pv should
be the updated just before this function is used.
------------------------------------------------------------------------*/
void pid_bumpless(struct _pid *pid)
{
//偏差 = 目标值-当前值
pid->last_error = (pid->sp)-(pid->pv);
}
/*------------------------------------------------------------------------
pid_calc
DESCRIPTION Performs PID calculations for the _pid structure *a. This function uses the positional form of the pid equation, and incorporates an integral windup prevention algorithim. Rectangular integration is used, so this function must be repeated on a consistent time basis for accurate control.
RETURN VALUE The new output value for the pid loop.
USAGE #include "control.h"*/
float pid_calc(struct _pid *pid)
{
int err;
float pterm; //比例项
float dterm; //微分项
float result; // 输出结果
float ferror; //偏差
// 偏差计算 偏差 = 目标值 - 当前值
err = (pid->sp) - (pid->pv);
if (abs(err) > pid->deadband)
{
ferror = (float) err; /*do integer to float conversion only once*/
pterm = pid->pgain * ferror;// 比例项计算
if (pterm > 100 || pterm < -100)
{
pid->integral = 0.0;
}
else
{
// 积分项计算
pid->integral += pid->igain * ferror;
if (pid->integral > 100.0)
{
pid->integral = 100.0;
}
else
{
if (pid->integral < 0.0)
pid->integral = 0.0;
}
}
// 微分项计算
dterm = ((float)(err - pid->last_error)) * pid->dgain;
// PID各项 综合
result = pterm + pid->integral + dterm;
}
else
result = pid->integral;
pid->last_error = err;
return (result);
}
void main(void)
{
float display_value;
int count=0;
pid = &warm;
// printf("Enter the values of Process point, Set point, P gain, I gain, D gain \n");
// scanf("%d%d%f%f%f", &process_point, &set_point, &p_gain, &i_gain, &d_gain);
process_point = 30;
set_point = 40;
p_gain = (float)(5.2);
i_gain = (float)(0.77);
d_gain = (float)(0.18);
dead_band = 2;
integral_val =(float)(0.01);
printf("The values of Process point, Set point, P gain, I gain, D gain \n");
// printf("%lf %lf %lf %lf %lf\n", process_point, set_point, p_gain, i_gain, d_gain);
pid_init(&warm, process_point, set_point);
pid_tune(&warm, p_gain,i_gain,d_gain,dead_band);
pid_setinteg(&warm,0.0); //pid_setinteg(&warm,30.0);
//Get input value for process point
pid_bumpless(&warm);
count = 0;
while(count<=20)
{
// how to display output
pid_init(&warm, display_value, set_point);
display_value = pid_calc(&warm);
printf("%f\n", display_value);
//printf("\n%f%f%f%f",warm.pv,warm.sp,warm.igain,warm.dgain);
count++ ;
}
}