手头上有一个Rplidar A2 激光雷达,通过其进行slam建图,如下。

环境:
1、Rplidar A2 激光雷达;
2、笔记本电脑;
3、Ubuntu 16.04;
4、ROS Kinetic。
1、安装雷达驱动
sudo apt-get install ros-kinetic-rplidar-ros
2、更改com port 权限
sudo chmod 666 /dev/ttyUSB0
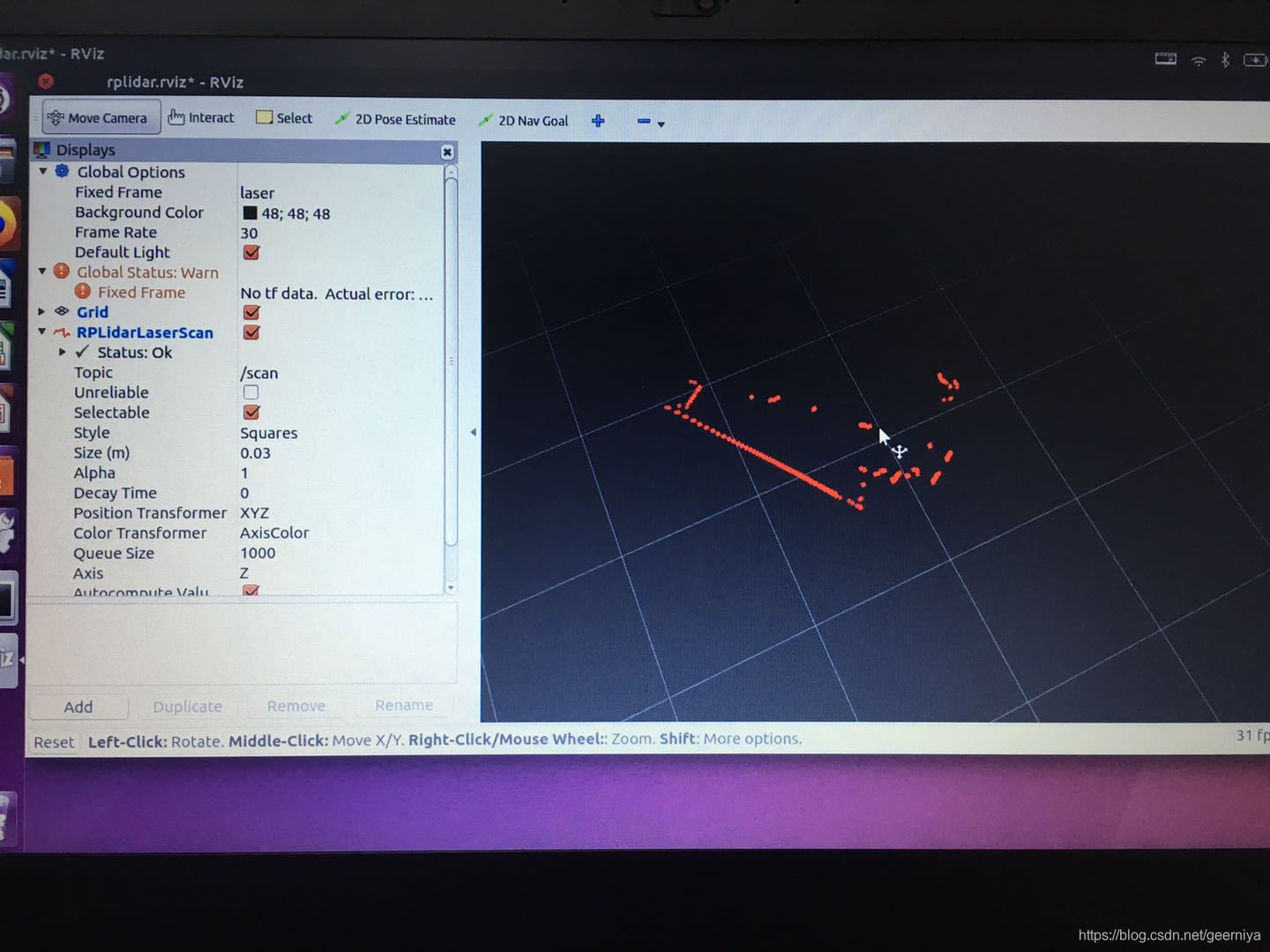
3、测试扫描界面
roslaunch rplidar_ros view_rplidar.launch
成功的话,便会显示如下界面:
4、安装hector_slam库
这里采用hector_slam作为slam的方法。
安装:
sudo apt-get install ros-kinetic-hector-slam
5、在rplidar_ros中新建slam.launch文件
默认安装的rplidar_ros中并没有slam文件,我们在上一步安装slam库后,可以在rplidar_ros中新建一个slam.launch文件。
在rplidar_ros/launch/目录下添加slam.launch文件:
<launch>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="2048"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<param name="map_multi_res_levels" value="2" />
<param name="map_pub_period" value="2" />
<param name="laser_min_dist" value="0.4" />
<param name="laser_max_dist" value="5.5" />
<param name="output_timing" value="false" />
<param name="pub_map_scanmatch_transform" value="true" />
<!--<param name="tf_map_scanmatch_transform_frame_name" value="scanmatcher_frame" />-->
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.7" />
<param name="map_update_distance_thresh" value="0.2"/>
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
<param name="scan_topic" value="scan"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster" args="0 0 0 0 0 0 /base_link /laser 100"/>
<node pkg="rviz" type="rviz" name="rviz"
args="-d $(find hector_slam_launch)/rviz_cfg/mapping_demo.rviz"/>
</launch>
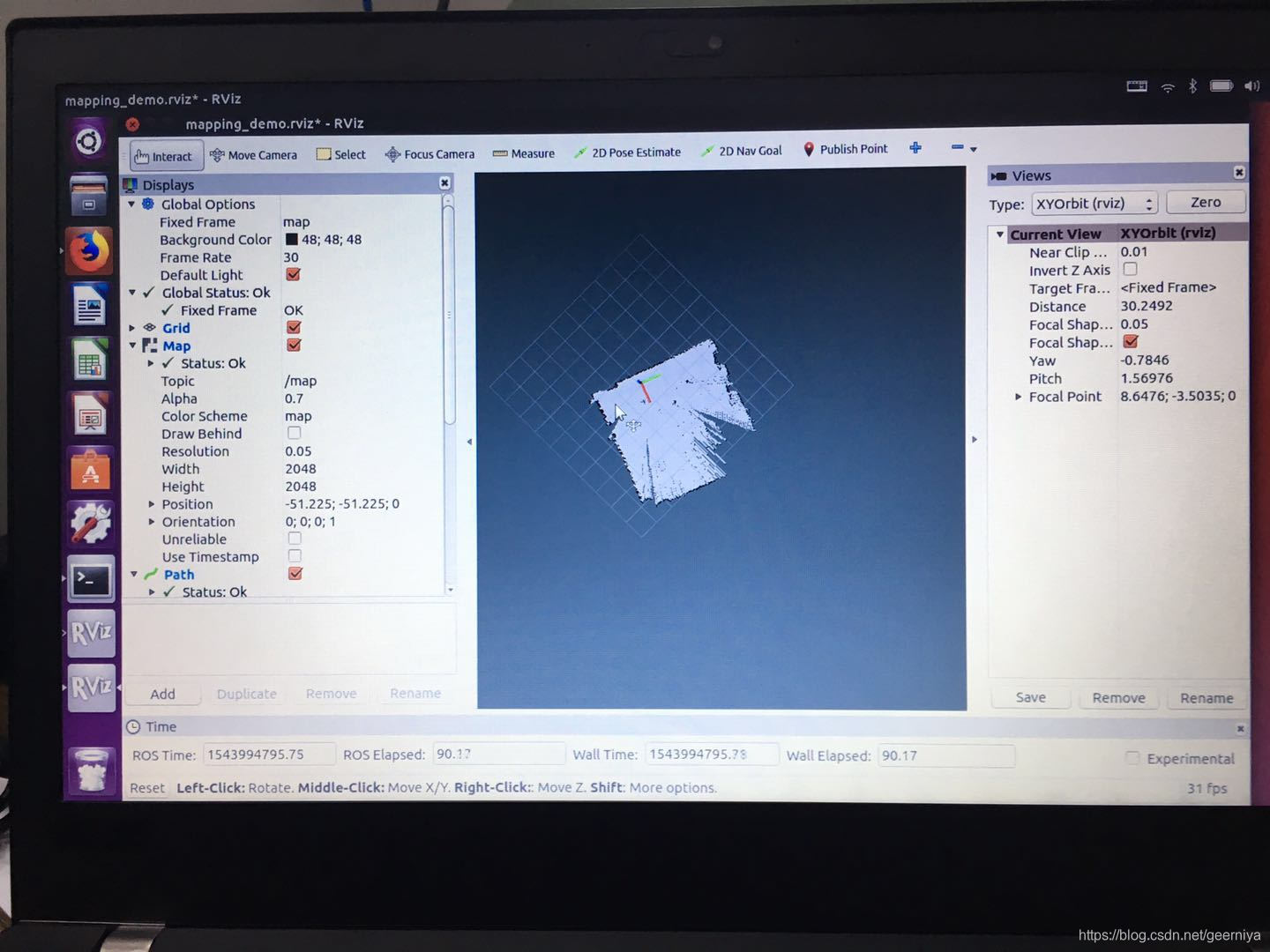
6、slam建图
sudo chmod 666 /dev/ttyUSB0
roslaunch rplidar_ros slam.launch
通过稳定移动雷达,可以扫描出周围的环境,完成建图。如下:
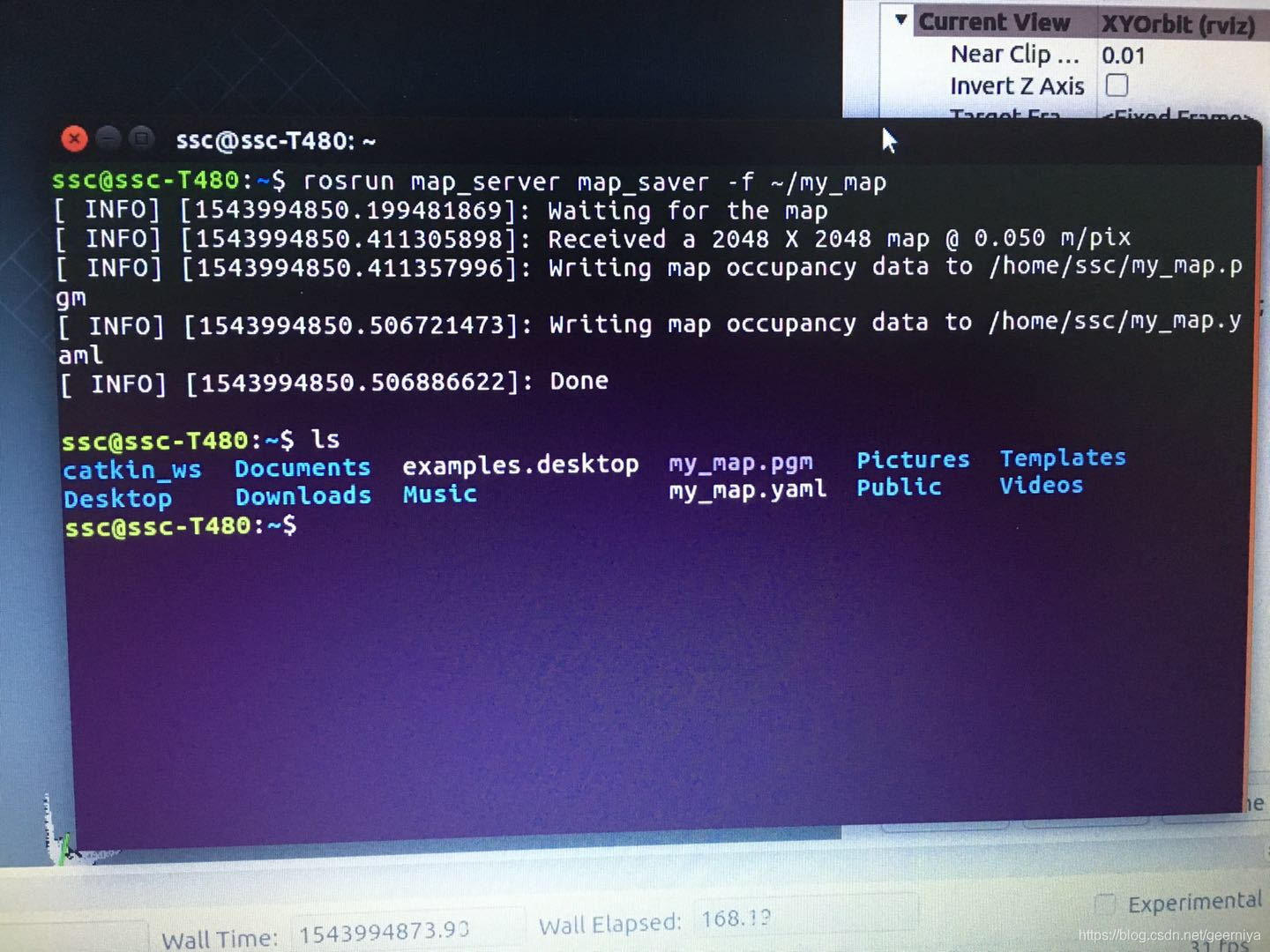
7、保存slam得到的地图信息
首先,需要安装map_server包。
sudo apt-get install ros-kinetic-map-server
然后,保存图形。
rosrun map_server map_saver -f ~/my_map
如下:
至此,便完成了雷达的测试、slam建图、保存等工作。
注意:
在手动移动雷达过程中需要稳定,由于雷达没有imu功能,稍微晃动大一点便会导致定位失败,slam失败。