写在前面:
本博文是在考研之际帮女票在Ubuntu 16.04.5 LTS操作系统下成功安装ROS Kinetic并连接RPLIDAR A2进行实时扫描的详细过程以及遇到的问题。为了给女票成功安装ROS并进行测试,可把小编给累坏了,无数次重装系统,安装ROS,后面的RPLIDAR A2测试也是让我很折腾了好久…………不过为了不让我在女票面前丢面子^ _ ^,最终还是强忍着安装好了所有东西并进成功进行了测试!
1,U盘安装Ubuntu16.04.5 LTS操作系统
由于内容很多,Ubuntu16.04.5 LTS的安装详解我就不再赘述了,不过大家如果还没有装过Linux系统的话,建议大家先学一下这两个东西:
- 先学会用U盘做一个启动盘:用UltraISO制作Ubuntu16.04 U盘启动盘;
- 学会如何给电脑分区:如何用diskgenius进行硬盘分区,也就是分区出来安装你的Linux操作系统;
- 然后就可以直接跟着教程安装了(这里给大家附上我安装成功的一篇教程:U盘启动安装Ubuntu16.04详解(注意安装的时候选择传统模式安装,不要选择UEFI模式安装,这样很容易出现各种各样的矛盾)。
PS:现在上图中的KingstonDataTraveler 3.0,也就是倒数第二个来进行安装。
2,安装ROS Kinetic环境
这里需要给大家一个比较善意的提醒:大家在安装好Ubuntu16.04.5 LTS 系统后,先不要安装任何软件或更新源,直接联网进行安装ROS Kinetic环境,这样基本都会一次成功,否则你就会出现各种各样的错误,最后唯一一个比较好的解决办法就是重新安装系统,这是我自己在虚拟机上以及正式的系统上都亲测有效的!
1)配置Ubuntu资源库:“restricted”,“universe"和"multiverse”。一般情况是不用配置的,参考下图红色框部分。如果没有配置,可以参考Ubuntu官网:点击打开链接

2)设置Ubuntu的sources.list:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3)设置KEY:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
PS:如果无法连接上述服务器,可以尝试hkp://pgp.mit.edu:80或者hkp://keyserver.ubuntu.com:80
4)更新Package
sudo apt-get update
5)安装ROS Kinetic完整版:
sudo apt-get install ros-kinetic-desktop-full
安装完可以查看可用的package:

apt-cache search ros-kinetic
6)初始化rosdep:(在使用ROS之前必须要初始化rosdep)
sudo rosdep init
rosdep update
7)配置环境:
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
8)安装building package的依赖:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
9)测试ROS安装成功:
(1),打开Termial,输入以下命令,初始化ROS环境:
roscore
(2),打开新的Termial,输入以下命令,弹出一个小乌龟窗口:
rosrun turtlesim turtlesim_node
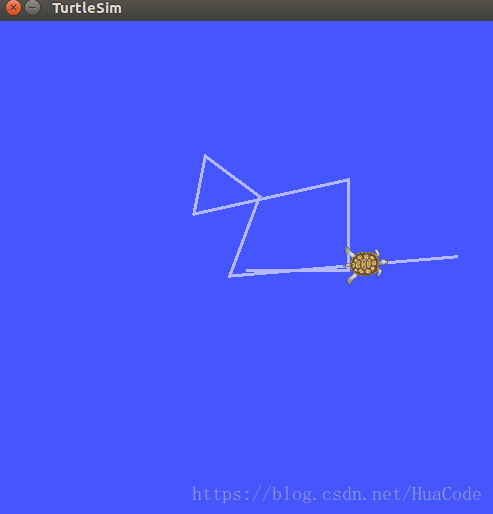
(3),打开新的Termial,输入以下命令,可以在Termial中通过方向键控制小乌龟的移动:
rosrun turtlesim turtle_teleop_key
按键盘上的上下左右按键,乌龟就会按照你的指令开始移动,并显示轨迹
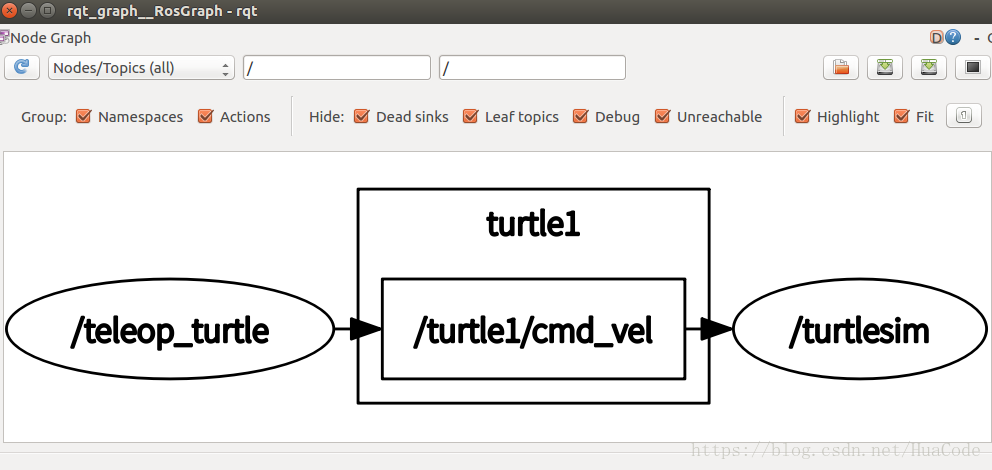
(4) 打开新的Termial,输入以下命令,弹出新的窗口查看ROS节点信息:
rosrun rqt_graph rqt_graph
PS:完成了上诉操作,给你一个表情^ _ ^哈哈表示你的ROS环境已经成功安装了,这时你可以连接RPLIDAR A2进行测试了,不过这时基于我上面说的在不安装任何软件或者更新任何源的情况下!
3,连接RPLIDAR A2进行可视化测试
写在前面:其实连接RPLIDAR A2雷达只需要三个步骤:1,开启ROS环境;2,开启RVIZ图形可视化界面;3,启动雷达;但是这里常常不容易解决的就是第三点:启动雷达这个过程,这个过程很负责,你需要创建ros包并编译,下载RPLIDAR Ros包,并配置USB端口权限等等……烦的一批!!!
1)ROS程序包的创建和编译:
可以参考这篇博文,这里不再赘述:ROS程序包的创建和编译
2)下载rplidar ros包并放入到catkin工作区间的src文件夹中:
下载网址:rplidar ros包
git clone https://github.com/robopeak/rplidar_ros.git
或者直接下载到本地解压到src文件夹中。
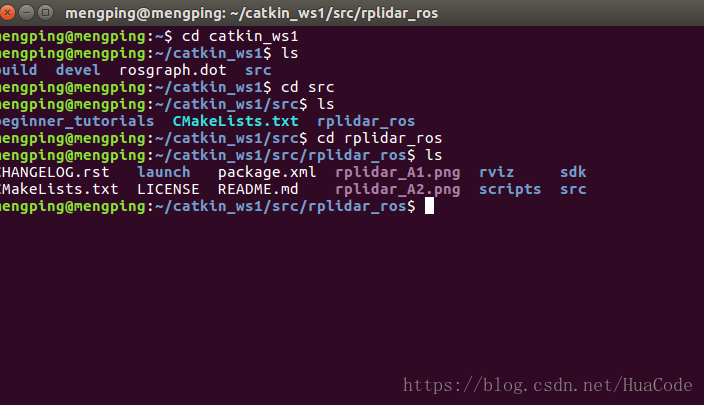
3)创建好的工作区间如图所示:
4)连接RPLIDAR A2
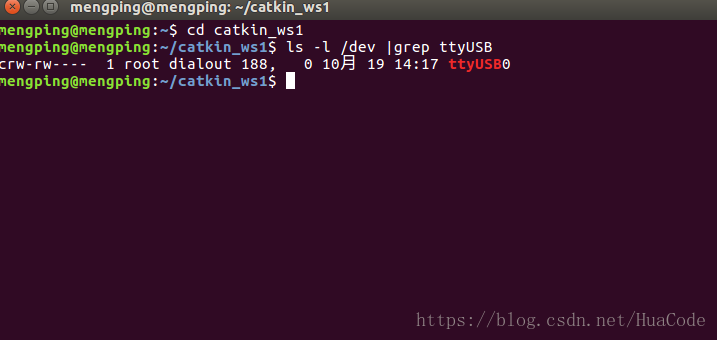
(1)先插上RPLIDAR A2,检查RPLIDAR A2的串行端口的权限:

ls -l / dev | grep ttyUSB
(2)添加写权限:(如/ dev / ttyUSB0)
sudo chmod 666 /dev/ttyUSB0
(3)开启ROS环境:

roscore
(4)有两种方法来运行rplidar ros包
-
在rviz中运行rplidar节点和视图
a. 将ROS环境添加到catkin工作区间中:source devel/setup.bash
如果直接运行下面的命令将会报如下的错误:
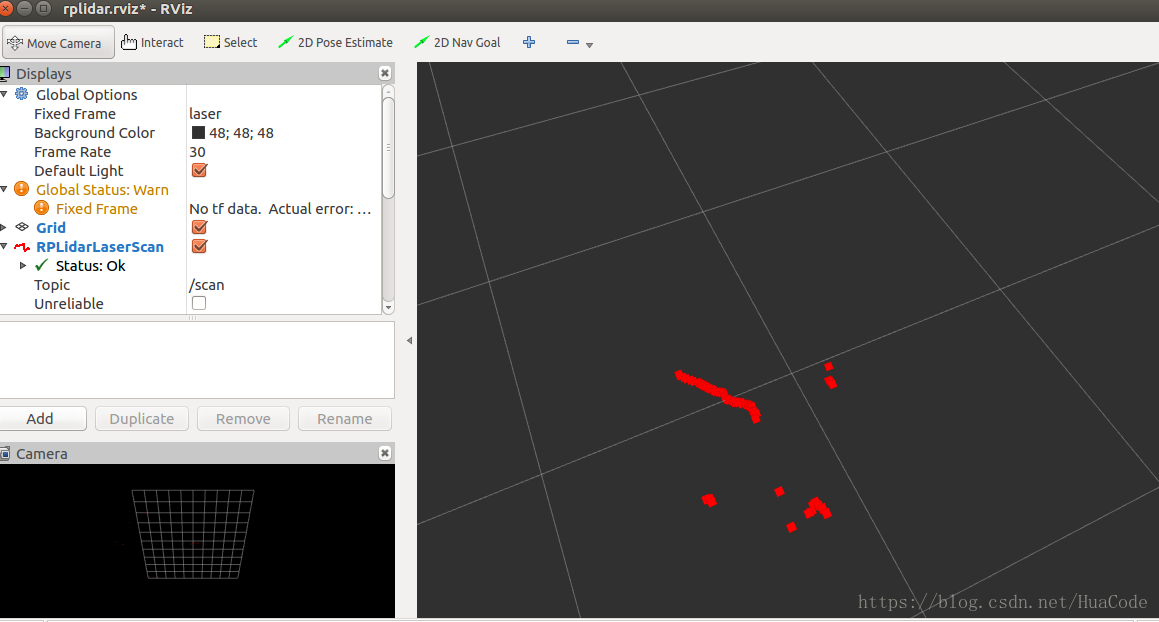
b. 运行RVIZ:roslaunch rplidar_ros view_rplidar.launch
如果还是报错,就按照上面的要求输入具体的地址:
roslaunch /home/mengping/catkin_ws/src/rplidar_ros/launch/view_rplidar.launch
c.然后我们就可以看到雷达的实时采样了:
PS:此时连接的雷达应该被驱动起来转动! -
使用测试应用程序运行rplidar节点和视图
a. 将ROS环境添加到catkin工作区间中:source devel/setup.bash
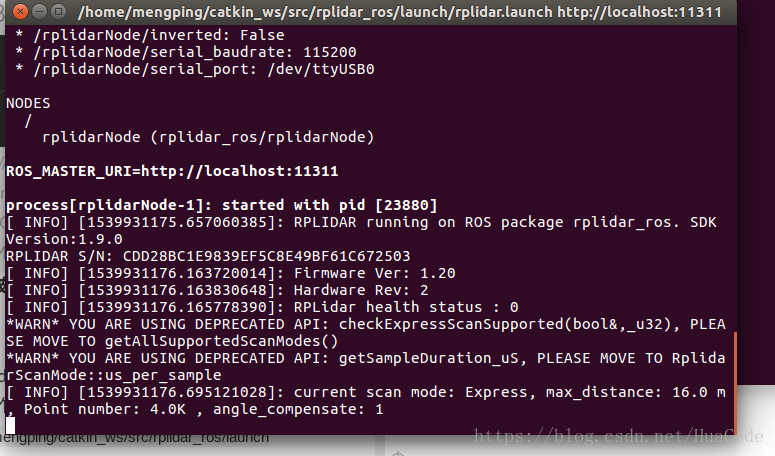
b.开启雷达:roslaunch /home/mengping/catkin_ws/src/rplidar_ros/launch/rplidar.launch
PS:此时雷达应该被驱动并转动起来!
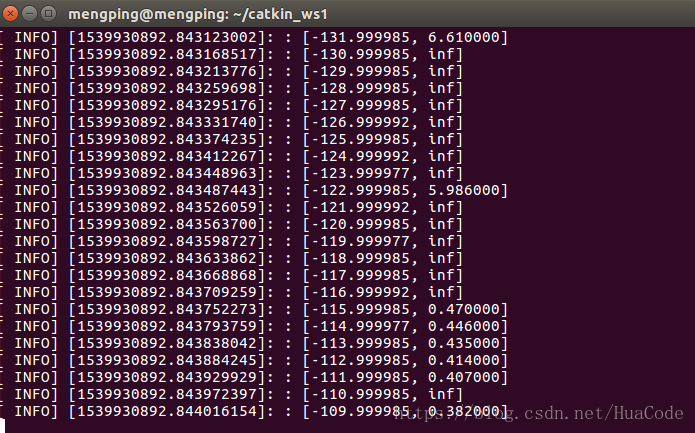
c.在控制台查看雷达扫描结果:rosrun rplidar_ros rplidarNodeClient

到此我们的ROS Kinetic环境的安装以及在RPLIDAR A2上的测试就算完成了,结果还是令人很满意的!考研之际,时间紧迫,没有更多的时间来注重格式啥的,还请各位道友见谅,请大家根据我上面说的相应的版本来进行借鉴,哈喽尅提!