分享一下我老师大神的人工智能教程!零基础,通俗易懂!http://blog.csdn.net/jiangjunshow
也欢迎大家转载本篇文章。分享知识,造福人民,实现我们中华民族伟大复兴!
因为准备投入学习 CS294,具体见 知乎专栏,复习了下之前学习 Udacity 和 CS181 中有关强化学习部分的笔记和资料,再看了遍 David Silver 课程的 PPT,整理成了这篇文章。
另外,准备建一个深度增强学习方面的微信交流群,有兴趣的朋友可以加我微信:awolegechu 请注明 姓名-学校/单位
马尔可夫决策过程(Markov Decision Processes,MDPs)
MDPs 简单说就是一个智能体(Agent)采取行动(Action)从而改变自己的状态(State)获得奖励(Reward)与环境(Environment)发生交互的循环过程。
MDP 的策略完全取决于当前状态(Only present matters),这也是它马尔可夫性质的体现。
其可以简单表示为:
基本概念
: 有限状态 state 集合,s 表示某个特定状态
: 有限动作 action 集合,a 表示某个特定动作
- Transition Model
: Transition Model, 根据当前状态 s 和动作 a 预测下一个状态 s’,这里的
表示从 s 采取行动 a 转移到 s’ 的概率
- Reward
:表示 agent 采取某个动作后的即时奖励,它还有 R(s, a, s’), R(s) 等表现形式,采用不同的形式,其意义略有不同
- Policy
: 根据当前 state 来产生 action,可表现为
或
,后者表示某种状态下执行某个动作的概率
回报(Return):
与 折扣率(discount)
: U 代表执行一组 action 后所有状态累计的 reward 之和,但由于直接的 reward 相加在无限时间序列中会导致无偏向,而且会产生状态的无限循环。因此在这个 Utility 函数里引入
折扣率这一概念,令往后的状态所反馈回来的 reward 乘上这个 discount 系数,这样意味着当下的 reward 比未来反馈的 reward 更重要,这也比较符合直觉。定义
由于我们引入了 discount,可以看到我们把一个无限长度的问题转换成了一个拥有最大值上限的问题。
强化学习的目的是最大化长期未来奖励,即寻找最大的 U。(注:回报也作 G 表示)
基于回报(return),我们再引入两个函数
- 状态价值函数:
,意义为基于 t 时刻的状态 s 能获得的未来回报(return)的期望,加入动作选择策略后可表示为
(
)
- 动作价值函数:
,意义为基于 t 时刻的状态 s,选择一个 action 后能获得的未来回报(return)的期望
价值函数用来衡量某一状态或动作-状态的优劣,即对智能体来说是否值得选择某一状态或在某一状态下执行某一动作。
MDP 求解
我们需要找到最优的策略使未来回报最大化,求解过程大致可分为两步,具体内容会在后面展开
- 预测:给定策略,评估相应的状态价值函数和状态-动作价值函数
- 行动:根据价值函数得到当前状态对应的最优动作
Bellman 期望方程
Bellman 方程的分析
为了更加了解方程中期望的具体形式,可以见下图,第一层的空心圆代表当前状态(state),向下连接的实心圆代表当前状态可以执行两个动作,第三层代表执行完某个动作后可能到达的状态 s’。
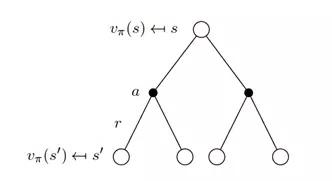
根据上图得出状态价值函数公式:
其中,
上式中策略是指给定状态 s 的情况下,动作 a 的概率分布,即
我们将概率和转换为期望,上式等价于:
同理,我们可以得到动作价值函数的公式如下:
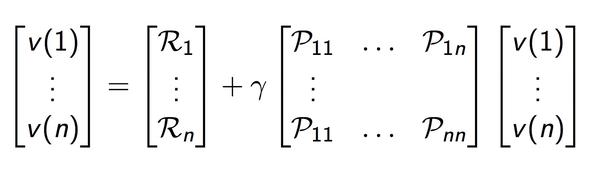 如上图,Bellman 方程也可以表达成矩阵形式:
如上图,Bellman 方程也可以表达成矩阵形式:
状态价值函数和动作价值函数的关系
最优方程
最优价值函数(optimal state-value function)
其意义为所有策略下价值函数的最大值
Bellman最优方程
- v 描述了处于一个状态的长期最优化价值,即在这个状态下考虑到所有可能发生的后续动作,并且都挑选最优的动作来执行的情况下,这个状态的价值
- q 描述了处于一个状态并执行某个动作后所带来的长期最优价值,即在这个状态下执行某一特定动作后,考虑再之后所有可能处于的状态并且在这些状态下总是选取最优动作来执行所带来的长期价值
最优策略(Optimal Policy)
关于收敛性:(对策略定义一个偏序)
定理:
对于任意 MDP:
- 总是存在一个最优策略
,它比其它任何策略都要好,或者至少一样好
- 所有最优决策都达到最优值函数,
- 所有最优决策都达到最优行动值函数,
最优策略可从最优状态价值函数或者最优动作价值函数得出:
求解 Bellman 最优方程
通过解 Bellman 最优性方程找一个最优策略需要以下条件:
-
- 动态模型已知
- 拥有足够的计算空间和时间
- 系统满足 Markov 特性
所以我们一般采用近似的办法,很多强化学习方法一般也是研究如何近似求解 Bellman 方程,一般有下面几种(后文会做具体讲解):
-
- Value Iteration
- Policy Iteration
- Q-learning
- Sarsa
MDPs 还有下面几种扩展形式:
-
- Infinite and continuous MDPs
- Partially observable MDPs
- Undiscounted, average reward MDPs
动态规划求解 MDPs 的 Planning
动态规划是一种通过把复杂问题划分为子问题,并对自问题进行求解,最后把子问题的解结合起来解决原问题的方法。「动态」是指问题由一系列的状态组成,而且状态能一步步地改变,「规划」即优化每一个子问题。因为MDP 的 Markov 特性,即某一时刻的子问题仅仅取决于上一时刻的子问题的 action,并且 Bellman 方程可以递归地切分子问题,所以我们可以采用动态规划来求解 Bellman 方程。
MDP 的问题主要分两类
- Prediction 问题
- 输入:MDP
和策略(policy)
- 输出:状态价值函数
- 输入:MDP
- Control 问题
- 输入:MDP
- 输出:最优状态价值函数
和最优策略
- 输入:MDP
解决也是分两种,见下文
Policy Iteration
步骤:
- Iterative Policy Evaluation:
- 基于当前的 Policy 计算出每个状态的 Value function
- 同步更新:每次迭代更新所有的状态的 v
- 矩阵形式:
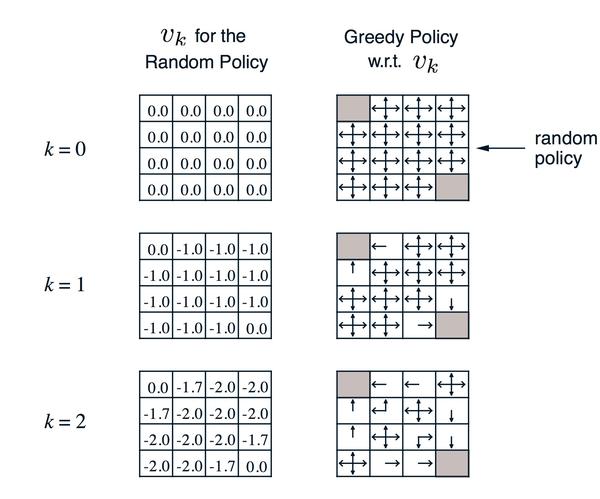
- 左边是第 k 次迭代每个 state 上状态价值函数的值,右边是通过贪心(greedy)算法找到策略
- 计算实例:
- k=2, -1.7 = -1.0 + 2 x (1/3) x (-1)
- k=3, -2.9 = -1.0 + -1.7 x (1/3) + 2 x (1/3) x (-2.0)
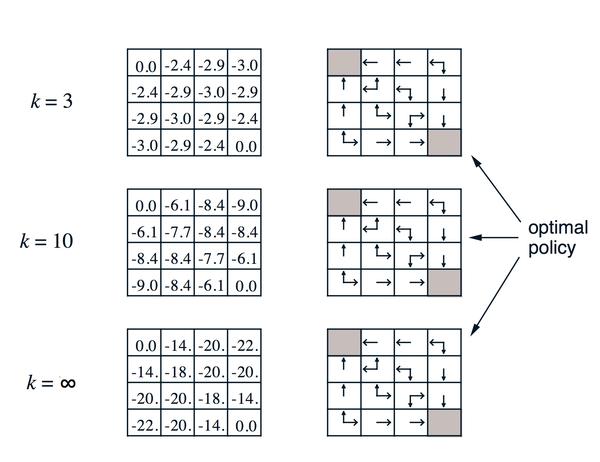
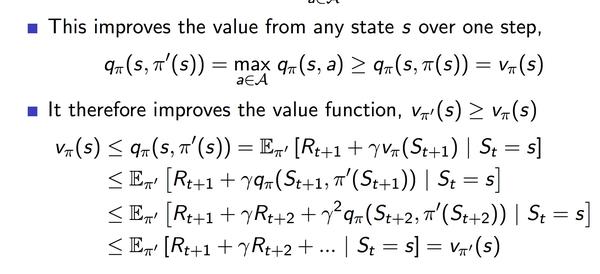
- Policy Improvement
- 基于当前的状态价值函数(value function),用贪心算法找到最优策略
会一直迭代到收敛,具体证明如图:
- 扩展
- 事实上在大多数情况下 Policy evaluation 不必要非常逼近最优值,这时我们通常引入
函数来控制迭代停止
- 很多情况下价值函数还未完全收敛,Policy 就已经最优,所以在每次迭代之后都可以更新策略(Policy),当策略无变化时停止迭代
- 事实上在大多数情况下 Policy evaluation 不必要非常逼近最优值,这时我们通常引入
- 基于当前的状态价值函数(value function),用贪心算法找到最优策略
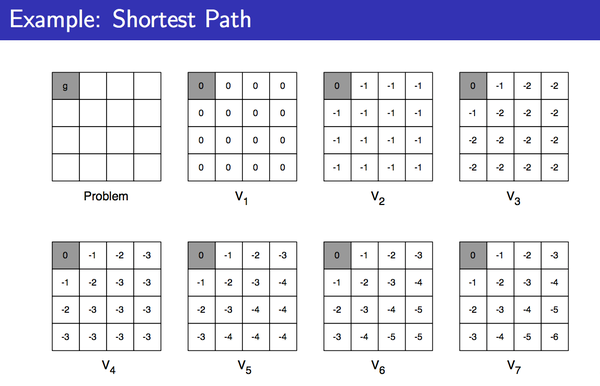
Value Iteration
- 最优化原理:当且仅当状态 s 达到任意能到达的状态 s‘ 时,价值函数 v 能在当前策略(policy)下达到最优,即
,与此同时,状态 s 也能基于当前策略达到最优,即
- 状态转移公式为:
- 矩阵形式为:
- 下面是一个实例,求每个格子到终点的最短距离,走一步的 reward 是 -1:
同步动态规划算法小结
- 迭代策略评估(Iterative Policy Evaluation)解决的是 Prediction 问题,使用了贝尔曼期望方程(Bellman Expectation Equation)
- 策略迭代(Policy Iteration)解决的是 Control 问题,实质是在迭代策略评估之后加一个选择 Policy 的过程,使用的是贝尔曼期望方程和贪心算法
- 价值迭代(Value Iteration) 解决的是 Control 问题,它并没有直接计算策略(Policy),而是在得到最优的基于策略的价值函数之后推导出最优的 Policy,使用的是贝尔曼最优化方程(Bellman Optimality Equation)
还有关于 Model-Free, Value Function Approximation, Policy Gradient 等等一堆内容明天再弄。。。。
参考资料:
给我老师的人工智能教程打call!http://blog.csdn.net/jiangjunshow

新的改变
我们对Markdown编辑器进行了一些功能拓展与语法支持,除了标准的Markdown编辑器功能,我们增加了如下几点新功能,帮助你用它写博客:
- 全新的界面设计 ,将会带来全新的写作体验;
- 在创作中心设置你喜爱的代码高亮样式,Markdown 将代码片显示选择的高亮样式 进行展示;
- 增加了 图片拖拽 功能,你可以将本地的图片直接拖拽到编辑区域直接展示;
- 全新的 KaTeX数学公式 语法;
- 增加了支持甘特图的mermaid语法1 功能;
- 增加了 多屏幕编辑 Markdown文章功能;
- 增加了 焦点写作模式、预览模式、简洁写作模式、左右区域同步滚轮设置 等功能,功能按钮位于编辑区域与预览区域中间;
- 增加了 检查列表 功能。
功能快捷键
撤销:Ctrl/Command + Z
重做:Ctrl/Command + Y
加粗:Ctrl/Command + B
斜体:Ctrl/Command + I
标题:Ctrl/Command + Shift + H
无序列表:Ctrl/Command + Shift + U
有序列表:Ctrl/Command + Shift + O
检查列表:Ctrl/Command + Shift + C
插入代码:Ctrl/Command + Shift + K
插入链接:Ctrl/Command + Shift + L
插入图片:Ctrl/Command + Shift + G
合理的创建标题,有助于目录的生成
直接输入1次#,并按下space后,将生成1级标题。
输入2次#,并按下space后,将生成2级标题。
以此类推,我们支持6级标题。有助于使用TOC语法后生成一个完美的目录。
如何改变文本的样式
强调文本 强调文本
加粗文本 加粗文本
标记文本
删除文本
引用文本
H2O is是液体。
210 运算结果是 1024.
插入链接与图片
链接: link.
图片: 
带尺寸的图片: ![]()
当然,我们为了让用户更加便捷,我们增加了图片拖拽功能。
如何插入一段漂亮的代码片
去博客设置页面,选择一款你喜欢的代码片高亮样式,下面展示同样高亮的 代码片.
// An highlighted block var foo = 'bar'; 生成一个适合你的列表
- 项目
- 项目
- 项目
- 项目
- 项目1
- 项目2
- 项目3
- 计划任务
- 完成任务
创建一个表格
一个简单的表格是这么创建的:
| 项目 | Value |
|---|---|
| 电脑 | $1600 |
| 手机 | $12 |
| 导管 | $1 |
设定内容居中、居左、居右
使用:---------:居中
使用:----------居左
使用----------:居右
| 第一列 | 第二列 | 第三列 |
|---|---|---|
| 第一列文本居中 | 第二列文本居右 | 第三列文本居左 |
SmartyPants
SmartyPants将ASCII标点字符转换为“智能”印刷标点HTML实体。例如:
| TYPE | ASCII | HTML |
|---|---|---|
| Single backticks | 'Isn't this fun?' |
‘Isn’t this fun?’ |
| Quotes | "Isn't this fun?" |
“Isn’t this fun?” |
| Dashes | -- is en-dash, --- is em-dash |
– is en-dash, — is em-dash |
创建一个自定义列表
- Markdown
- Text-to- HTML conversion tool
- Authors
- John
- Luke
如何创建一个注脚
一个具有注脚的文本。2
注释也是必不可少的
Markdown将文本转换为 HTML。
KaTeX数学公式
您可以使用渲染LaTeX数学表达式 KaTeX:
Gamma公式展示 是通过欧拉积分
你可以找到更多关于的信息 LaTeX 数学表达式here.
新的甘特图功能,丰富你的文章
gantt
dateFormat YYYY-MM-DD
title Adding GANTT diagram functionality to mermaid
section 现有任务
已完成 :done, des1, 2014-01-06,2014-01-08
进行中 :active, des2, 2014-01-09, 3d
计划一 : des3, after des2, 5d
计划二 : des4, after des3, 5d
- 关于 甘特图 语法,参考 这儿,
UML 图表
可以使用UML图表进行渲染。 Mermaid. 例如下面产生的一个序列图::
这将产生一个流程图。:
- 关于 Mermaid 语法,参考 这儿,
FLowchart流程图
我们依旧会支持flowchart的流程图:
- 关于 Flowchart流程图 语法,参考 这儿.
导出与导入
导出
如果你想尝试使用此编辑器, 你可以在此篇文章任意编辑。当你完成了一篇文章的写作, 在上方工具栏找到 文章导出 ,生成一个.md文件或者.html文件进行本地保存。
导入
如果你想加载一篇你写过的.md文件或者.html文件,在上方工具栏可以选择导入功能进行对应扩展名的文件导入,
继续你的创作。
注脚的解释 ↩︎