均值漂移算法是一种基于密度梯度上升的非参数方法,通过迭代运算找到目标位置,实现目标跟踪。所谓跟踪,就是通过已知的图像帧中的目标位置找到目标在下一帧中的位置。均值漂移算法显著的优点是算法计算量小,简单易实现,很适合于实时跟踪场合;但是跟踪小目标和快速移动目标时常常失败,而且在全部遮挡情况下不能自我恢复跟踪。通过实验提出应用核直方图来计算目标分布,证明了均值漂移算法具有很好的实时性特点。均值漂移在聚类、图像平滑、分割、跟踪等方面有着广泛的应用。
2 均值漂移算法中的非参数估计方法
非参数估计和参数估计(即,监督参数估计和非监督参数估计)共同构成了概率密度估计方法。非参数估计也有人将其称之为无参密度估计,它是一种对先验知识要求最少,完全依靠训练数据进行估计,而且可以用于任意形状密度估计的方法。常见的非参数估计方法有以下几种:
A.直方图:把数据的值域分为若干相等的区间,数据按照区间分为若干组,每组形成一个矩形,矩形的高和该组数据的多少成正比,其底为所属区间,将这些矩形依次排列组成的图形就是直方图。它提供给数据一个直观的形象,但只适合低维数据的情况,当维数较高时,直方图所需的空间将随着维数的增加呈指数级增加。
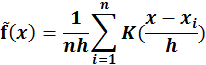
B.核密度估计(Kernel Density Estimates,简称KDE):就是采用平滑的峰值函数(“核”)来拟合观察到的数据点,从而对真实的概率分布曲线进行模拟。原理和直方图有些类似,是一种平滑的无参密度估计方法。对于一组采样数据,把数据的值域分为若干相等的区间,每个区间称为一个bin,数据就按区间分为若干组,每组数据的个数和总参数个数的比率就是每个bin的概率值。相对于直方图法,它多了一个用于平滑数据的核函数。核密度估计方法适用于中小规模的数据集,可以很快地产生一个渐近无偏的密度估计,有良好的概率统计性质。具体来说,如果数据为x1,x2,…,xn,在任意点x的一种核密度估计为:
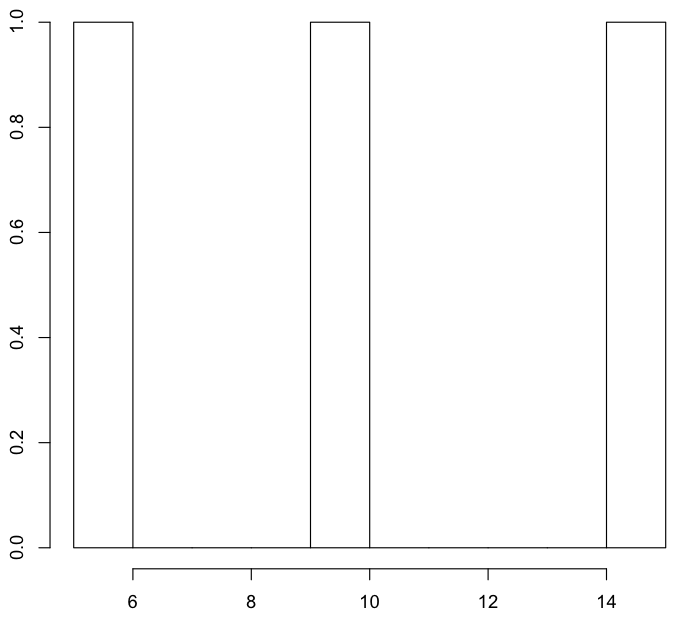
绘制成直方图是这样的:
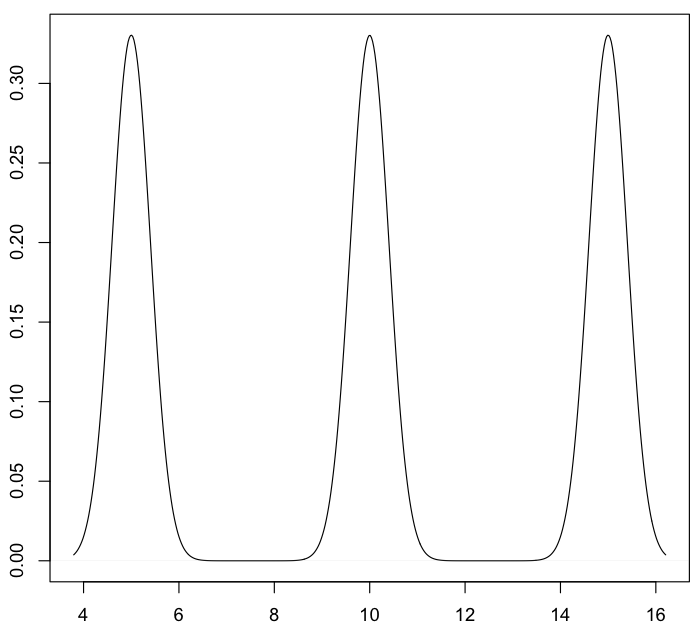
而使用KDE则是:
其中 K(*)称为核函数,满足对称性及 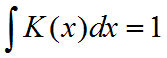
C.局部多项式密度估计:目前最流行,效果很好的密度估计 方法。对每一个点x拟合一个局部多项式来估计该点的密度。
D.K近邻估计:核密度估计的加权是以数据点到x的欧式距离为基准来进行的,而K近邻估计是无论欧氏距离多少,只要是x点的最近的k个点的其中之一就可参与加权。一种具体的k近邻密度估计:
令d1<=…<=dn表示按升幂排列的x到所有n个样本点的欧氏距离。K的取值决定了估计密度曲线的光滑程度,k越大越光滑。与核估计结合起来定义广义的k近邻估计:

E.多元密度估计:上述的几种估计方法都是一元密度估计方法。假定x为d维向量,则多元密度估计可以为 :
其中,
3 OpenCV中的均值漂移算法
均值漂移算法以迭代的方式锁定概率函数的局部最大值。比如有一个矩形窗口将一幅图像的某个部分框住,原理就是寻找预定义窗口中数据点的重心,或者说加权平均值。该算法将窗口中心移动到数据点的重心处,并重复这个过程直到窗口重心收敛到一个稳定点。在OpenCV中,该算法的运行有两种终止条件:达到最大迭代次数终止MAX_ITER和迭代到阈值终止EPS。
//终止条件:第二个参数为迭代的最大次数,最后一个参数是特定的阈值
TermCriteria criteria(TermCriteria::MAX_ITER,10,0.01);
//result为HSV中H通道对原图的直方图反投影图像,rect为预定义窗口
meanShift(result,rect,criteria);
- 1
- 2
- 3
- 4
因此,迭代完成的结果的好与坏取决于输入的概率图(上述中的预定义窗口)和它的初始位置。
整个跟踪步骤:
- 设置初始跟踪目标,即框住待跟踪目标
- 获取待跟踪目标的HSV中的色度H通道图像的直方图
- 待跟踪直方图归一化
- 到新的数据帧图像中反投影待跟踪直方图
- 均值漂移,更新跟踪位置
在这之前,我们还需要了解怎么通过反投影直方图以检测特定的图像内容:
OpenCV【5】—通过反投影直方图以检测特定的图像内容
4 测试程序
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/video/video.hpp>
#include "colorhistogram.h"
#include "contentfinder.h"
using namespace cv;
using namespace std;
bool pause = false;
bool is_tracking = false;
Rect drawing_box;
Mat current;
MatND colorhist;
ContentFinder finder;
void meanShiftTracking(Mat current)
{
//设置跟踪直方图
finder.setHistogram(colorhist);
//转换到HSV空间
Mat hsv;
vector<Mat> v;
cvtColor(current,hsv,CV_BGR2HSV);
//分割图像
split(hsv,v);
//识别低饱和度(S)的像素
int minSat = 65;
threshold(v[1],v[1],minSat,255,THRESH_BINARY);
//获取直方图的反投影
Mat result;
int ch[1]={0};
result = finder.find(hsv,0.0f,180.0f,ch,1);
//去除低饱和度的像素
//result(根据H色度反投影的图像)和v[1]是一样大小,此时的result受饱和度S影响较大
bitwise_and(result,v[1],result);
//使用meanShift算法更新矩形位置
//迭代算法的终止条件:达到最大迭代次数终止MAX_ITER,迭代到阈值终止EPS
//第二个参数为迭代的最大次数,最后一个参数是特定的阈值
TermCriteria criteria(TermCriteria::MAX_ITER,10,0.01);
//使用CamShift算法,改进版的均值漂移算法,搜索窗口的尺寸和朝向会发生改变
CamShift(result,drawing_box,criteria);
meanShift(result,drawing_box,criteria);
//更新矩形位置显示
cv::rectangle(current, drawing_box, cv::Scalar(0,0,255),2);
imshow("VideoCapture Mean Shift Track Object",current);
}
void onMouse( int event, int x, int y, int flags, void *param )
{
if (pause)
{
Mat imageROI;
ColorHistogram hc;
int minSat = 65;
switch(event)
{
case CV_EVENT_LBUTTONDOWN:
drawing_box.x = x;
drawing_box.y = y;
break;
case CV_EVENT_LBUTTONUP:
drawing_box.width = x - drawing_box.x;
drawing_box.height = y - drawing_box.y;
imageROI = current(drawing_box).clone();
//显示鼠标画的目标框
rectangle(current,drawing_box,Scalar(0,0,255),2);
imshow("VideoCapture Mean Shift Track Object",current);
//获取色调通道的直方图
//最小阈值:小于等于65为0,大于65为255
colorhist = hc.getHueHistogram(imageROI,minSat);
is_tracking = true;
break;
default:
break;
}
}
}
int main(int, char**)
{
//打开PC默认摄像头
VideoCapture cap(0);
if(!cap.isOpened())
return -1;
while(1){
Mat frame;
//从摄像头获取一帧图像
cap >> frame;
current = frame;
if(is_tracking){
meanShiftTracking(current);
}
uchar cmd = waitKey(1);
//暂停
if(cmd == 'p')
{
pause = true;
// 第一个参数跟窗口的名字有关
// 即回调函数需要注册到的窗口名字,即产生事件的窗口。
setMouseCallback("VideoCapture Mean Shift Track Object",onMouse,0);
}
//退出
else if(cmd == 'b'){
break;
}
while(pause){
if(waitKey(0) == 'p')
pause = false;
}
imshow("VideoCapture Mean Shift Track Object",current);
}
//camera 将会随着程序的结束在析构函数中自动释放内存
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
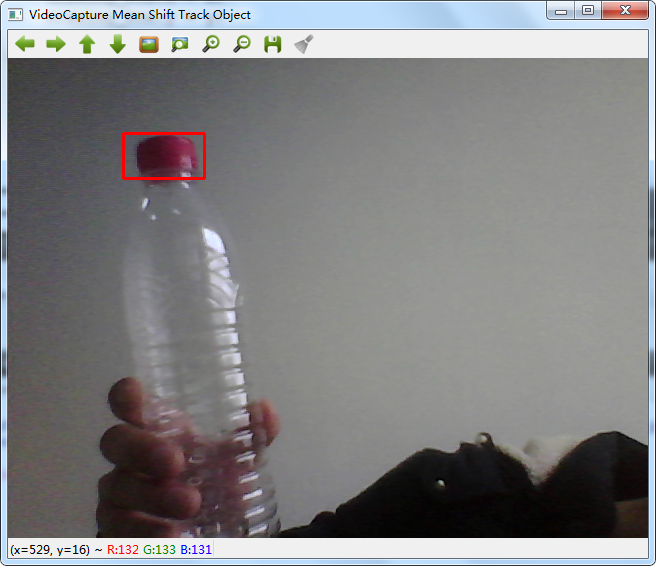
效果截图:
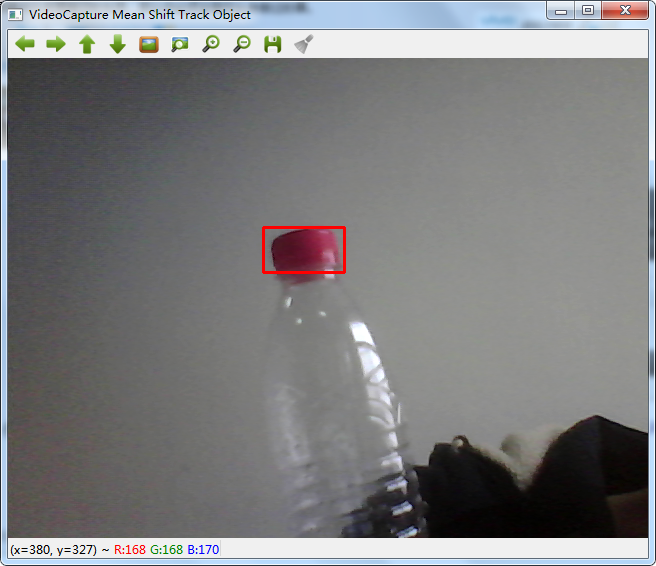
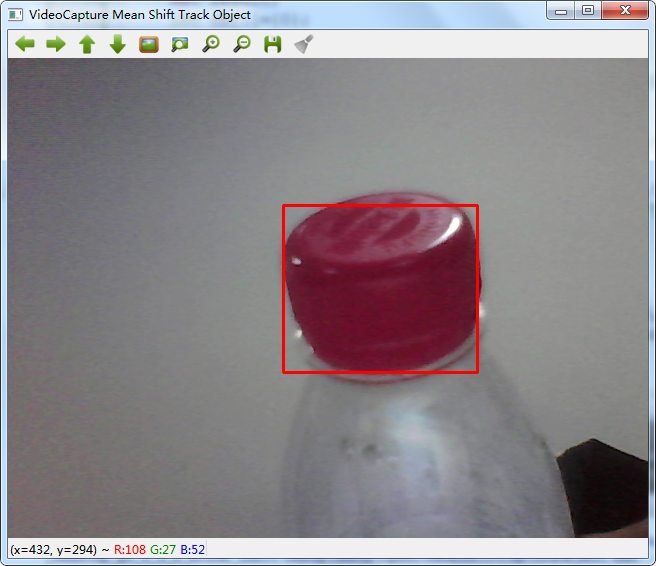
使用改进版的均值漂移算法CamShift效果:
meanShift算法用于视频目标跟踪时,采用目标的颜色直方图作为搜索特征,通过不断迭代meanShift向量使得算法收敛于目标的真实位置,从而达到跟踪的目的。传统的meanShift算法在跟踪中有几个优势:
(1)算法计算量不大,在目标区域已知的情况下完全可以做到实时跟踪;
(2)采用核函数直方图模型,对边缘遮挡、目标旋转、变形和背景运动不敏感。
同时,meanShift算法也存在着以下一些缺点:
(1)缺乏必要的模板更新;
(2)跟踪过程中由于窗口宽度大小保持不变,当目标尺度有所变化时,跟踪就会失败;
(3)当目标速度较快时,跟踪效果不好;
(4)直方图特征在目标颜色特征描述方面略显匮乏,缺少空间信息;
由于其计算速度快,对目标变形和遮挡有一定的鲁棒性,所以,在目标跟踪领域,meanShift算法目前依然受到大家的重视。但考虑到其缺点,在工程实际中也可以对其作出一些改进和调整;例如:
(1)引入一定的目标位置变化的预测机制,从而更进一步减少meanShift跟踪的搜索时间,降低计算量;
(2)可以采用一定的方式来增加用于目标匹配的“特征”;
(3)将传统meanShift算法中的核函数固定带宽改为动态变化的带宽;
(4)采用一定的方式对整体模板进行学习和更新;