版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/abc8730866/article/details/70157199
特征检测与匹配(二)——SURF特征点检测与匹配
1.SURF特征点提取
2.绘制特征点
3.特征点描述符(特征向量)提取
4.使用Flann匹配器进行匹配
5.对匹配结果进行筛选(依据DMatch结构体中的float类型变量distance进行筛选)
6.绘制匹配结果
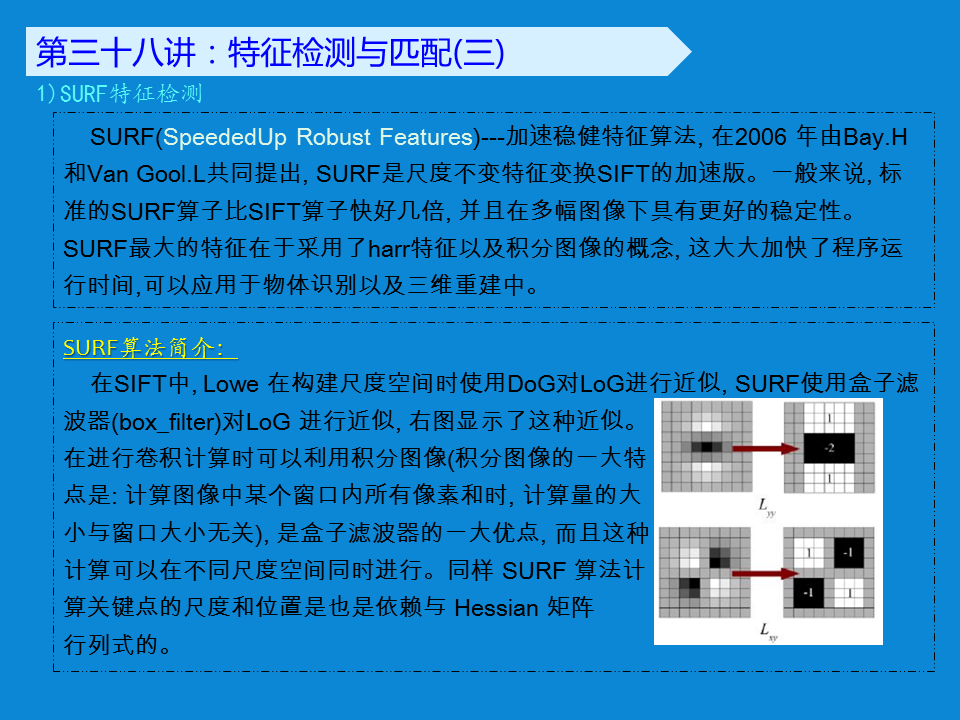
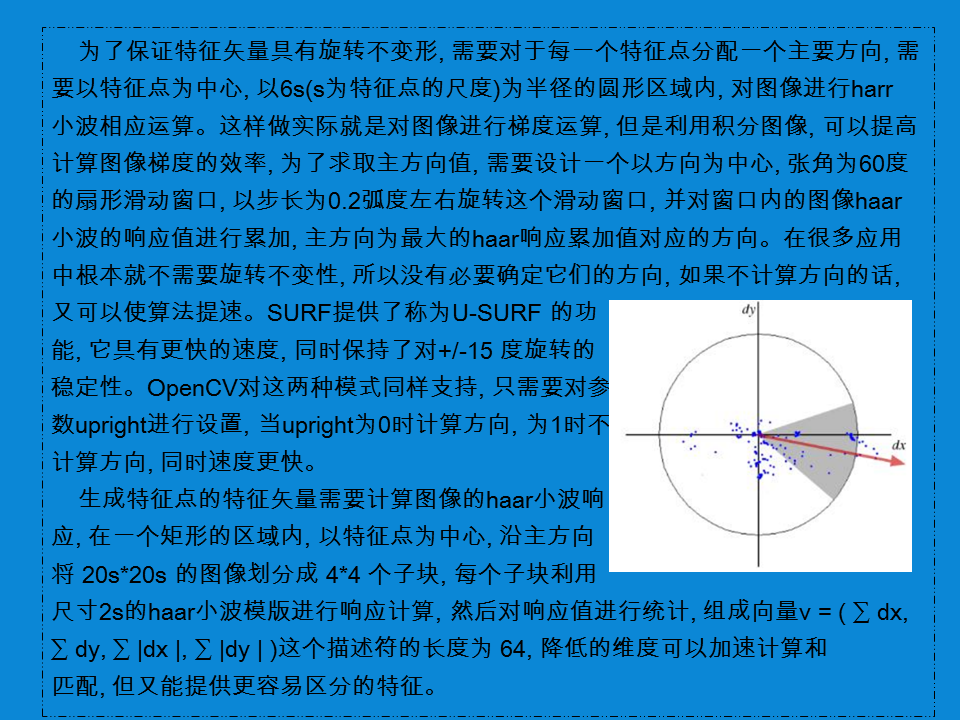
先上ppt:



代码:1.SURF特征点检测
///SURF特征点检测
#include "opencv2/opencv.hpp"
using namespace cv;
#include "opencv2/nonfree/nonfree.hpp"//SURF相关
#include <iostream>
using namespace std;
int main()
{
Mat srcImg1 = imread("00.jpg",CV_LOAD_IMAGE_COLOR);
Mat srcImg2 = imread("01.jpg", CV_LOAD_IMAGE_COLOR);
Mat dstImg1, dstImg2;
//定义SURF特征检测类对象
SurfFeatureDetector surfDetector;//SurfFeatureDetector是SURF类的别名
//定义KeyPoint变量
vector<KeyPoint> keyPoints1;
vector<KeyPoint> keyPoints2;
//特征点检测
surfDetector.detect(srcImg1,keyPoints1);
surfDetector.detect(srcImg2, keyPoints2);
//绘制特征点(关键点)
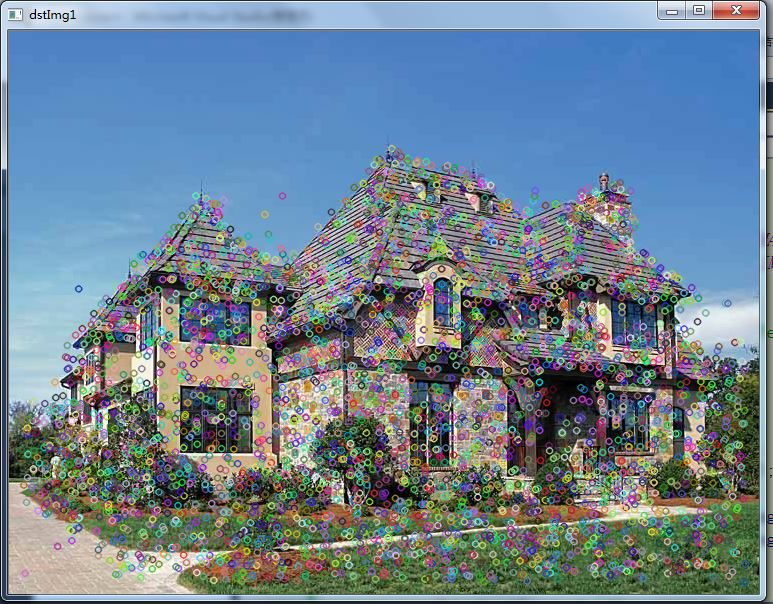
drawKeypoints(srcImg1, keyPoints1, dstImg1);
drawKeypoints(srcImg2, keyPoints2, dstImg2);
//显示结果
imshow("dstImg1", dstImg1);
imshow("dstImg2", dstImg2);
waitKey(0);
return 0;
}运行结果:

代码:2.SURF特征点匹配
///SURF特征点匹配
#include "opencv2/opencv.hpp"
using namespace cv;
#include "opencv2/nonfree/nonfree.hpp"//SURF相关
#include "opencv2/legacy/legacy.hpp"//匹配器相关
#include <iostream>
using namespace std;
int main()
{
//1.SURF特征点提取——detect()方法
Mat srcImg1 = imread("11.jpg",CV_LOAD_IMAGE_COLOR);
Mat srcImg2 = imread("22.jpg", CV_LOAD_IMAGE_COLOR);
Mat dstImg1, dstImg2;
//定义SURF特征检测类对象
SurfFeatureDetector surfDetector;//SurfFeatureDetector是SURF类的别名
//定义KeyPoint变量
vector<KeyPoint> keyPoints1;
vector<KeyPoint> keyPoints2;
//特征点检测
surfDetector.detect(srcImg1,keyPoints1);
surfDetector.detect(srcImg2, keyPoints2);
//绘制特征点(关键点)
drawKeypoints(srcImg1, keyPoints1, dstImg1);
drawKeypoints(srcImg2, keyPoints2, dstImg2);
//显示结果
imshow("dstImg1", dstImg1);
imshow("dstImg2", dstImg2);
//2.特征点描述符(特征向量)提取——compute()方法
SurfDescriptorExtractor descriptor;//SurfDescriptorExtractor是SURF类的别名
Mat description1;
Mat description2;
descriptor.compute(srcImg1,keyPoints1,description1);
descriptor.compute(srcImg2, keyPoints2, description2);
//3.使用Flann匹配器进行匹配——FlannBasedMatcher类的match()方法
FlannBasedMatcher matcher;//实例化Flann匹配器
vector<DMatch> matches;
matcher.match(description1,description2,matches);
//4.对匹配结果进行筛选(依据DMatch结构体中的float类型变量distance进行筛选)
float minDistance = 100;
float maxDistance = 0;
for (int i = 0; i < matches.size(); i++)
{
if (matches[i].distance < minDistance)
minDistance = matches[i].distance;
if (matches[i].distance > maxDistance)
maxDistance = matches[i].distance;
}
cout << "minDistance: " << minDistance << endl;
cout << "maxDistance: " << maxDistance << endl;
vector<DMatch> goodMatches;
for (int i = 0; i < matches.size(); i++)
{
if (matches[i].distance < 2 * minDistance)
{
goodMatches.push_back(matches[i]);
}
}
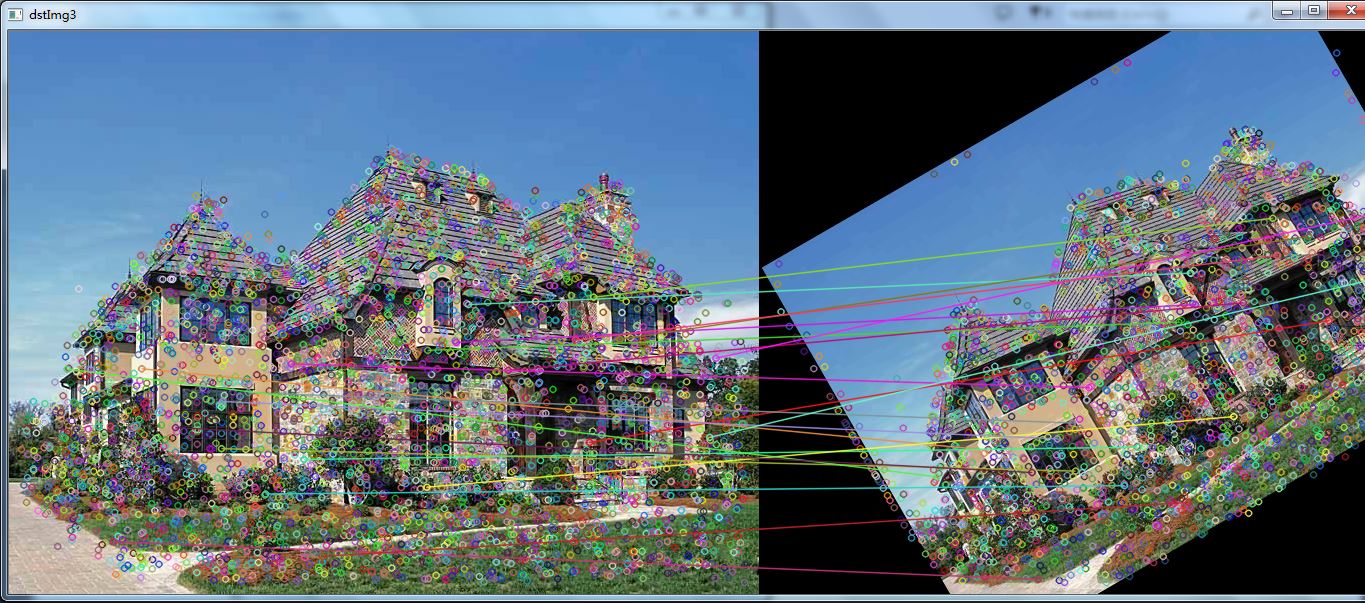
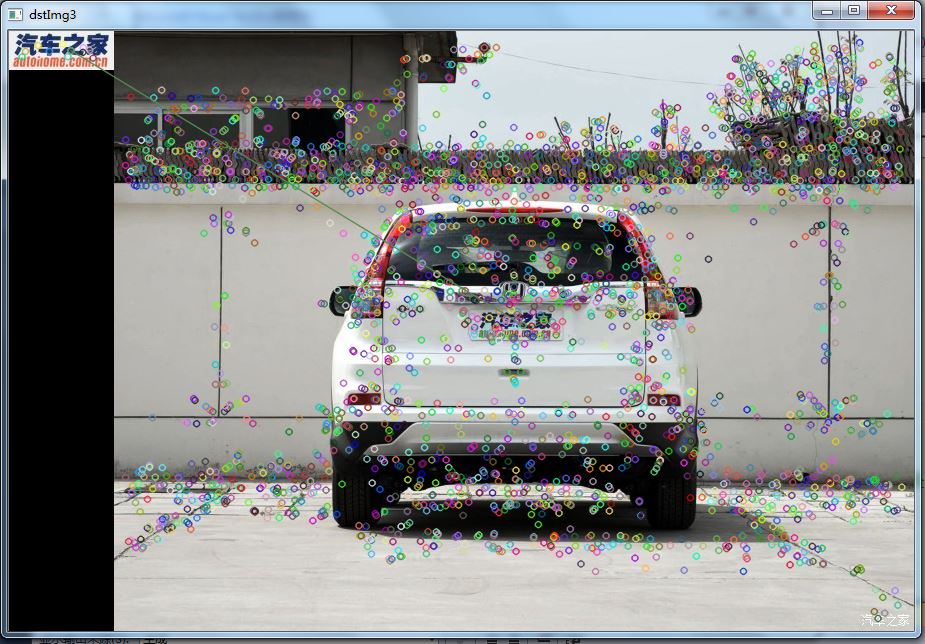
//5.绘制匹配结果——drawMatches()
Mat dstImg3;
drawMatches(srcImg1, keyPoints1, srcImg2, keyPoints2, goodMatches, dstImg3);
imshow("dstImg3", dstImg3);
waitKey(0);
return 0;
}运行结果: