好的特征应该具有以下几个特点:
- 重复性:不同图像相同的区域应该能被重复检测到,而且不受到旋转、模糊、光照等因素的影响;
- 可区分性:不同的检测子,应该可以被区分出来,而为了区分它们,应运而生的就是与检测对应的描述子了;
- 数量适宜:检测子可别太多,不然啥阿猫阿狗都能出来混,但也不能太少,要求太高可就招不到人才了;
- 高定位(尺度和位置):是在哪出现的,最好就在哪被找到,可别跑偏了;
- 有效性:检测速度越快越好。
这次来介绍下SURF局部特征点检测与匹配~
Surf是对David Lowe在1999年提出的Sift算法的改进,提升了算法的执行效率,为算法在实时计算机视觉系统中应用提供了可能。与Sift算法一样,Surf算法的基本路程可以分为三大部分:局部特征点的提取、特征点的描述、特征点的匹配。
但Surf在执行效率上有两大制胜法宝——一个是积分图在Hessian(海森矩阵)上的使用,一个是降维的特征描述子的使用。了解这两大法宝是如何出奇制胜前,先回顾一下传统Sift算法的基本思路及其优缺点。
Sift是一种基于尺度空间的,对图像缩放、旋转、甚至仿射变换保持不变性的图像局部特征描述算子。
一、特征点提取
Sift的特征点是在DOG金字塔尺度空间中提取的,尺度空间的构建涉及到高斯卷积、图像下采样和高斯差分操作。在尺度空间中先初步提取出在尺度空间和二维图像空间上都是局部极值点的兴趣点,再滤除掉能量低的不稳定的和错误的兴趣点,得到最终稳定的特征点。
二、特征点描述
特征点描述包括特征点方向分配和128维向量描述两个步骤。
特征的的方向分配:Sift求取特征点周围邻域内所有像素的梯度方向,生成梯度方向直方图,并归一化为0~360°的梯度方向直方图到36个方向内,取梯度直方图的主要分量所代表的方向作为特征点的方向。
128维向量描述:这个仍然是基于梯度方向直方图展开的,去特征点周围邻域4*4个快,每块提取出8个梯度方向,共计128个方向作为特征的描述子。
三、特征点的匹配
特征点的匹配是通过计算两组特征点的128维的特征点的欧氏距离实现的。欧氏距离越小,则相似度越高,当欧式距离小于设定阈值时,可以判定为匹配成功。
Sift算法的优点是特征稳定,对旋转、尺度变换、亮度保持不变性,对视角变换、噪声也有一定程度的稳定性;缺点是实时性不高,并且对于边缘光滑目标的特征点提取能力较弱。
Surf改进了特征的提取和描述方式,用一种更为高效的方式完成特征的提取和描述,具体实现流程如下:
- 构建Hessian(海森矩阵),生成所有的兴趣点,用于特征的提取;
- 构建尺度空间
- 特征点定位
- 特征点主方向分配
- 生成特征点描述子
- 特征点匹配
1. 构建Hessian(海森矩阵),生成所有的兴趣点,用于特征的提取;
构建Hessian矩阵的目的是为了生成图像稳定的边缘点(突变点),跟Canny、拉普拉斯边缘检测的作用类似,为下文的特征提取做好基础。构建Hessian矩阵的过程对应于Sift算法中的高斯卷积过程。
海森矩阵(Hessian Matrix)是一个多元函数的二阶偏导数构成的方阵,描述了函数的局部曲率。由德国数学家Ludwin Otto Hessian于19世纪提出。
对一个图像f(x,y),其Hessian矩阵如下:
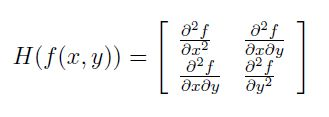
在构造Hessian矩阵前需要对图像进行高斯滤波,经过滤波后的Hessian矩阵表述为:
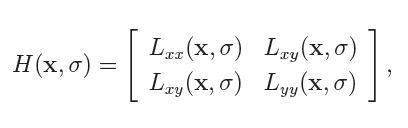
当Hessian矩阵的判别式取得局部极大值时,判定当前点是比周围邻域内其他点更亮或更暗的点,由此来定位关键点的位置。
我们知道在离散数字图像中,一阶导数是相邻像素的灰度差:

二阶导数是对一阶导数的再次求导:

反过来看Hessian矩阵的判别式,其实就是当前点对瓶方向二阶偏导乘以垂直方向的二阶偏导再减去当前点水平、垂直二阶偏导的二次方:

Hessian矩阵判别式中的f(x,y)是原始图像的高斯卷积,由于高斯核实服从正态分布的,从中心点往外,系数越来越低,为了提高运算速度,Surf使用了盒式滤波器来近似替代高斯滤波器,所以在Dxy上乘了一个加权系数0.9,目的是为了平衡因使用盒式滤波器近似所带来的误差:

高斯滤波器和盒式滤波器的示意图如下:
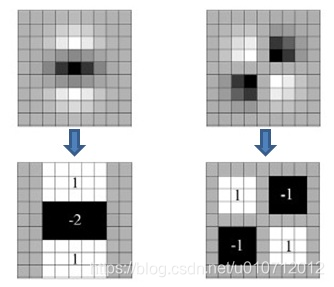
上边两幅图是9*9高斯滤波器模板分别在图像上垂直方向上二阶导数Dyy和Dxy对应的值,下边两幅图是使用盒式滤波器对其近似,灰色部分的像素值为0,黑色为-2,白色为1。
那么为什么盒式滤波器可以提高运算速度呢,这就涉及到积分图的使用。盒式滤波器对图像的滤波转化成计算图像上不同区域间像素和的加减运算问题,这正是积分图的强项,只需要简单几次查找积分图就可以完成。
2. 构建尺度空间
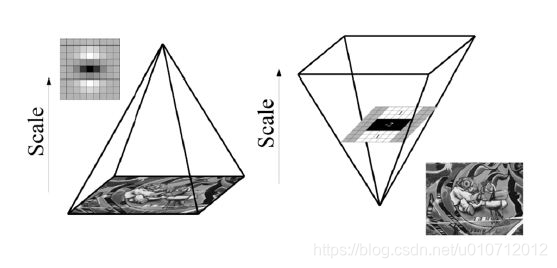
同Sift一样,Surf的尺度空间也是由Octave(金字塔的层)组成,不同的是,Sift中下一组图像的尺寸是上一组的一半,同一组间图像尺寸一样,但是所使用的高斯模糊系数逐渐增大;而在Surf中,不同组间图像的尺寸都是一致的,不同的是不同组间使用的盒式滤波器的模板尺寸逐渐增大,同一组间不同层间使用相同尺寸的滤波器,但是滤波器的模糊系数逐渐增大,如下图所示:
3. 特征点定位(利用非极大抑制初步确定特征点,再精确定位)
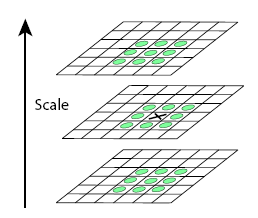
特征点的定位过程Surf和Sift保持一致,将经过Hessian矩阵处理的每个像素点与二维图像空间和尺度空间邻域内的26个点进行比较,初步定位出关键点,再经过滤除能量比较弱的关键点以及错误定位的关键点,筛选出最终的稳定的特征点。
4. 特征点主方向分配
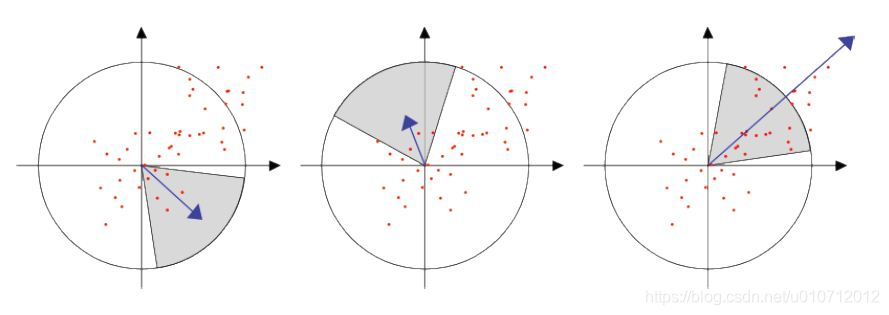
Sift特征点方向分配是采用在特征点邻域内统计其梯度直方图,取直方图bin值最大的以及超过最大bin值80%的那些方向作为特征点的主方向。而在Surf中,采用的是统计特征点圆形邻域内的harr小波特征。即在特征点的圆形邻域内,统计60度扇形内所有点的水平、垂直haar小波特征总和,然后扇形以0.2弧度大小的间隔进行旋转并再次统计该区域内haar小波特征值之后,最后将值最大的那个扇形的方向作为该特征点的主方向。该过程示意图如下:
5. 生成特征点描述子
在Sift中,是取特征点周围44个区域块,统计每小块内8个梯度方向,用着44*8=128维向量作为Sift特征的描述子。
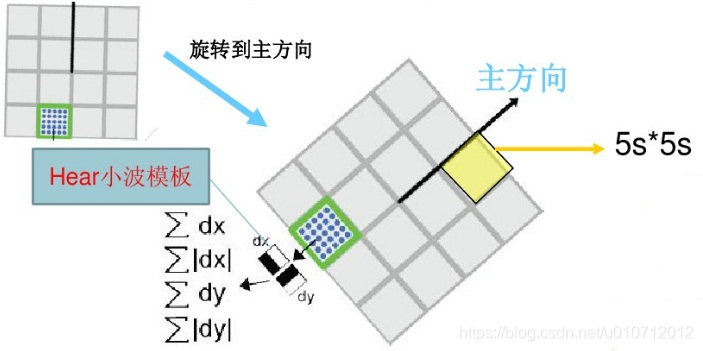
Surf算法中,也是在特征点周围取一个4*4的矩形区域块,但是所取得矩形区域方向是沿着特征点的主方向。每个子区域统计25个像素的水平方向和垂直方向的haar小波特征,这里的水平和垂直方向都是相对主方向而言的。该haar小波特征为水平方向值之和、垂直方向值之和、水平方向绝对值之和以及垂直方向绝对值之和4个方向。该过程示意图如下:
6. 特征点匹配
与Sift特征点匹配类似,Surf也是通过计算两个特征点间的欧式距离来确定匹配度,欧氏距离越短,代表两个特征点的匹配度越好。不同的是Surf还加入了Hessian矩阵迹的判断,如果两个特征点的矩阵迹正负号相同,代表这两个特征具有相同方向上的对比度变化,如果不同,说明这两个特征点的对比度变化方向是相反的,即使欧氏距离为0,也直接予以排除。
本来想在visual studio上跑surf算法进行图像特征点匹配的,但是,SURF/SIFT算法在opencv3.X中是没有的,需要下载opencv_contrib扩展库,之后需要用cmake进行编译,但是我按照教程做了,还是不能用,显示不能使用SURF,搞了一天还没搞定,一气之下,人生苦短,我用python。在python下搞opencv。