#Ubuntu系统安装ROS Kinetic步骤
安装ROS,需要先安装虚拟机VMware,并在VMware上安装Ubuntu系统,这里就不一一赘述,安装ROS的步骤我参考了好几篇博客,但自己实际安装的过程可谓困难重重,每一步都有可能不同的错误存在,而一步不对基本上也无法执行下面的操作,本人按照官网(https://wiki.ros.org/ROS/Installation)的安装教程下载速度极慢,装了好几天也没有成功,后来改了ROS服务器很快就装好了,这里给大家分享一下经验和技巧,希望大家可以在安装的过程里少走弯路。
##准备工作
注:以下步骤在后续的安装中会方便一点,也可以选择忽略,并不影响ROS的正常安装
###下载VMware Tools
先将ubuntu保持在运行状态,在工具栏选中虚拟机——安装VMware Tools

然后可以在左侧VMwaretools文件夹里找到VMwaretools的压缩文件,将其复制到home目录里

打开控制台,输入tar xvzf VM 后按tab键可以自动补齐,按回车键运行

输入sudo /.vmware 后按tab键补齐,按回车运行安装文件

出现此行的时候输入yes可继续执行,其他行按回车可以继续执行,执行完毕Ubuntu节面可全屏显示为安装成功

安装成功后将虚拟机挂起,点击编辑此虚拟机,进入选项,选择共享文件夹,点击右侧添加,即可添加也主机共享的文件

在主机上创建一个txt文件,保持在刚才的share文件夹中,可将ros安装命令复制到txt文本中,然后通过home/mnt/hgfs/share在Ubuntu中找到txt文本并打开,将命令直接复制到控制台,可以减少书写时不必要的错误。

**##安装ROS
1.1配置软件库**
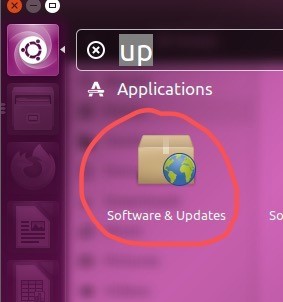
点击如图所示图标,搜索software出现下方圈中图标,点击打开
将Download from改为图中所示或中科大的 http://mirrors.ustc.edu,cn/ubuntu,然后关闭窗口

打开控制台输入sudo apt update,回车,开始安装刚才设置的配置文件
###1.2设置sources.list
输入sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
(这个是官网教程的指令,但因为是国外的源,在执行后面第三步,第四步的时候国内的网络下载会非常的慢,只有几kb甚至几b每秒,我就是因为这个原因卡了好几天,下来一两个小时进度才增加1%,下载完后执行又出错,真的非常搞人心态,而且还会出现error:connect fail的报错,所以如果第四步出现问题很大原因是源没有选用国内的)

第四步报错如下

所以推荐使用下面这个ROS服务器为中国科技大学的,速度会快上非常非常多
输入sudo sh -c ‘echo “deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’

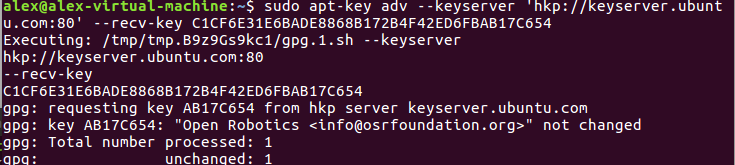
###1.3设置key
输入sudo apt-key adv --keyserver ‘hkp://keyserver.ubuntu.com:80’ --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
(此公key码为2020.3时官网查看的官方码,会实时更新,官网安装网址https://wiki.ros.org/ROS/Installation)
###1.4更新package
输入sudo apt-get update

###1.5安装ROS kinetic完整版
输入sudo apt-get install ros-kinetic-desktop-full
开始下载ros安装包

###1.6初始化rosdep
输入sudo rosdep init
回车
如出现sudo:rosdep:command not found 可输入如下指令再次尝试 sudo apt install python-rosdep

若上一步没有问题则输入rosdep update

###1.7配置ROS环境
输入echo “source /opt/ros/kinetic/setup.bash” >> ~/.bashrc
输入source ~/.bashrc
###1.8安装依赖项
输入sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential

至此,安装部分结束。
**##测试是否安装成功
1.打开一个控制台**
输入roscore
显示版本及内容

###2.
再新打开一个控制台
输入rosrun turtlesim turtlesim_node
会弹出一个小乌龟窗口
###3.
再新打开一个控制台
输入rosrun turtlesim turtle_teleop_key
就可以通过方向键控制小乌龟爬行


###4.
再新打开一个控制台
输入rosrun rqt_graph rqt_graph
可以查看ROS节点信息

若上述步骤都可以正常完成,说明ROS安装成功并可以正常运行。
这篇博客是我参考了其他很多类似的博客加上自己实际操作完成的,也是我第一次在CSDN上写博客,很感谢大家,希望可以给大家带来帮助!
欢迎大家留言,共同学习,共同进步!
