(作者:陈玓玏)
假设有一组数据 ,包含 个样本,其中每一个样本有 个特征值,每一个样本还对应其label ,也就是说这组数据是一个 的矩阵,那么我们可以通过一组参数 来实现对label的预测,这样当新来一个样本时,我们可以通过找到的这一组参数 和样本的运算(实际是一个函数)来预测其 值。
1. 代价函数
那怎么评估我们的预测是否准确呢?
先来科普一个三个概念:
损失函数(Loss Function):是定义在单个样本上的,是指一个样本的误差。
代价函数(Cost Function):是定义在整个训练集上的,是所有样本误差的平均,也就是所有损失函数值的平均。
目标函数(Object Function):是指最终需要优化的函数,一般来说是经验风险+结构风险,也就是(代价函数+正则化项)。
基于以上的概念,再加上线性回归的损失函数是平方损失函数,最终得到的代价函数公式为:
表示第
个样本的预测值,其公式为
,
表示第
个样本的真实值。
是截距项,可以理解为样本矩阵有一列全为1,这一列的系数是
。
我们拟合的目标是使得代价函数最小,表示每个样本预测值与真实值之间的差距平均值最小。既然样本值是确定的,那么我们要找的就是使得代价函数最小的一组
值,考虑一个足够简单的场景,即所有样本只有一个特征且
为0。此时我们可以知道,代价函数转换为以下形式:
这个函数只有一个参数
,且展开平方项的系数必然大于0,因此和项中的每一项都是一个自变量为
的开口向上的抛物线,
项的和仍然是一个开口向上的抛物线,因此我们总能找到一个使得
最小的
。扩展到多参数以后仍然成立。
2. 最小二乘法及梯度下降法
2.1 求解及更新参数
那么如何求解
向量呢?
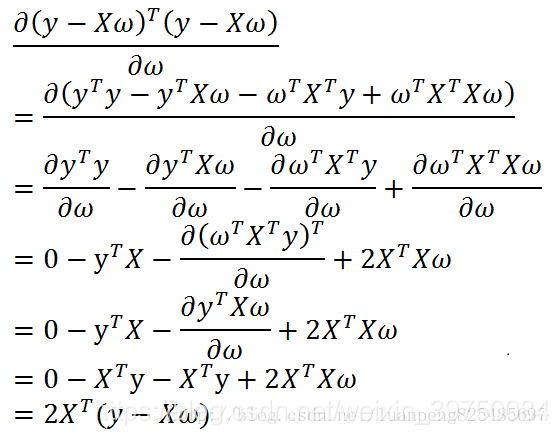
有两种方法可以考虑,一种是最小二乘法,一种是梯度下降法。两者的原理其实是一样的,那就是当
对
的偏导为0时,所得到的
值即为我们要求的结果。但最小二乘法是将整个代价函数转化为向量相乘的结果整体求解,
这里的
就是我们说的
,求解的结果为
这个结果求解的困难之处在于求逆。矩阵无法求逆的原因在于存在多余的特征(因为共线性),会导致
的行列式为0,因而不能求导。此时应该去分析各特征之间的共线性情况,相关性极高的特征群中留一个就可以了。
因为最小二乘法在存在共线性特征时无法求解,且在特征多时求解很慢(毕竟需要求一个
矩阵的逆),所以我们通常喜欢用另一种方法来求解,即梯度下降法。
梯度下降法的原理是沿着梯度下降的方向逐步逼近最低点。下面来看一张图:
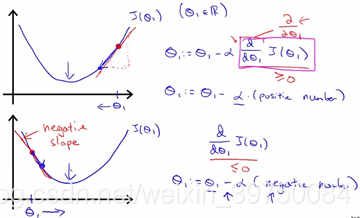
当前处于极值点左边时,梯度为负值,参数需要往增大的方向变化,因此我们更新参数时需要用当前参数值减去一个负数,而处于极值点右边时,梯度为正,参数需要往减小的方向变化,也是要减去一个正数,总之就是越来越接近极小值点。
也就是说,我们只需要按照梯度下降的方向(也就是
在
上下降最快的方向)每次跨出一小步,经过多次前进之后我们总能到达一个最近的极小值。
梯度可以由以下公式求得:
而梯度更新的方式为:
即:
2.2 学习率的选择
那么在以上公式中,还有一个疑惑就是,
参数是什么?这个参数就是步长,又称学习率,它能够控制我们学习的速度,具体看下图:
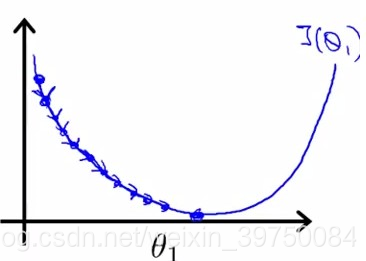
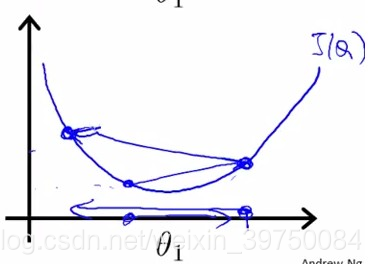
当学习率很小时,我们每次只会随着梯度的方向往前前进一点点,需要更多的迭代次数才能到达极小值点,找到合适的参数。当学习率很大时,每次更新的长度过大导致越过极值点,容易走成之字形,难以收敛,所以要将学习率控制在合理范围内,可以从一个较小的值开始尝试,逐步增大到合适的大小。
2.3 特征归一化
除了学习率,另外一个值得注意的问题就是特征归一化。看图说话:
左图是未归一化的代价函数等高线图(也就是不同的
值的横截面边缘,因为两个参数的
是抛物面,因此是这个形状),右图是归一化之后的。归一化简单来说就是将各个特征缩放到同一个scale上,如果不进行这个操作,容易出现左图的情况,也就是说
在scale较小的
对应的参数
上的每一步都是在逐渐减小的,但scale较大的
对应的参数
每次下降时,梯度公式中是包含数值较大的
的(可以自己推导一下),这样即使步长小,
也容易因为过度更新而产生过学习。
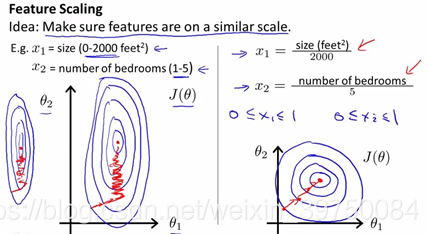
所以我们需要进行归一化,以期学习过程能够像右图那样进行。
参考文献: