版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/ZhtSunday/article/details/52094745
在上一篇文章中我们得到了分行后的数据图像Row1.jpg-Row4.jpg,本篇文章介绍数字的倾斜矫正。
1.方法

用Row1.jpg做示范。
本图数字倾斜情况并不明显。但是由于拍摄角度的问题,有的图像数字倾斜情况较为明显,而这里将采用的数字识别方法是特征识别,对于数字形状有较高要求,因此倾斜矫正是有必要的。
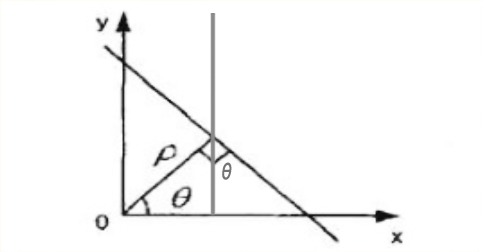
根据后文采用的识别方法,倾斜矫正的目的是要将数字的竖边矫正为竖直方向。即如图所示。

采用的方法是:
1. 利用hough变换找到与竖直方向夹角<30°的直线
2. 计算这些直线与竖直方向的夹角平均值avAng
3. 将图像旋转avAng
hough变换原理
hough变换简单来说就是将图像空间内的一条线转化为
具体原理可以参考这篇文章:hough变换
利用hough变换我们就可以将原图上找到的直线转化为一组
2.代码
/****************倾斜校正子程序*****************/
//函数名称:IplImage *Rotate(IplImage *RowImage)
//功能:对每行数字进行倾斜校正
//入口参数:行图像RowImage
//出口参数:旋转后的图像RotateRow
/********************************************/
IplImage *Rotate(IplImage *RowImage)
{
//建立储存边缘检测结果图像canImage
IplImage *canImage=cvCreateImage(cvGetSize(RowImage),IPL_DEPTH_8U,1);
//进行边缘检测
cvCanny(RowImage,canImage,30,200,3);
//进行hough变换
CvMemStorage *storage=cvCreateMemStorage();
CvSeq *lines=NULL;
lines=cvHoughLines2(canImage,storage,CV_HOUGH_STANDARD,1,CV_PI/180,20,0,0);
//统计与竖直夹角<30度的直线个数以及其夹角和
int numLine=0;
float sumAng=0.0;
for(int i=0;i<lines->total;i++)
{
float *line=(float *)cvGetSeqElem(lines,i);
float theta=line[1]; //获取角度 为弧度制
if(theta<30*CV_PI/180 || (CV_PI-theta)<30*CV_PI/180 )
{
numLine++;
sumAng=sumAng+theta;
}
}
//计算出平均倾斜角,anAng为角度制
float avAng=(sumAng/numLine)*180/CV_PI;
//获取二维旋转的仿射变换矩阵
CvPoint2D32f center;
center.x=float (RowImage->width/2.0);
center.y=float (RowImage->height/2.0);
float m[6];
CvMat M = cvMat( 2, 3, CV_32F, m );
cv2DRotationMatrix( center,avAng,1, &M);
//建立输出图像RotateRow
double a=sin(sumAng/numLine);
double b=cos(sumAng/numLine);
int width_rotate=int (RowImage->height*fabs(a)+RowImage->width*fabs(b));
int height_rotate=int (RowImage->width*fabs(a)+RowImage->height*fabs(b));
IplImage *RotateRow=cvCreateImage(cvSize(width_rotate,height_rotate),IPL_DEPTH_8U,1);
//变换图像,并用黑色填充其余值
m[2]+=(width_rotate-RowImage->width)/2;
m[5]+=(height_rotate-RowImage->height)/2;
cvWarpAffine(RowImage,RotateRow, &M,CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS,cvScalarAll(0));
//释放
cvReleaseImage(&canImage);
cvReleaseMemStorage(&storage);
return RotateRow;
}3.解析
- 为减少计算量,对图像进行canny边缘检测。图像变换为canImage。
//建立储存边缘检测结果图像canImage
IplImage *canImage=cvCreateImage(cvGetSize(RowImage),IPL_DEPTH_8U,1);
//进行边缘检测
cvCanny(RowImage,canImage,30,200,3);- 对canImage进行hough变换并且统计与竖直方向夹角<30°的直线数量、角度和,计算平均夹角。
- hough变换需要分配储存空间和指向该空间的指针,这里分别为storage和lines。
cvHoughLines2这个函数的第六个参数改变的是:将穿过多少个边缘像素点的直线确定为所需直线。该数越大,则产生的直线越少。本文中将其确定为20,对于不同的图片,可以对其进行调整。 - 用
cvGetSeqElem(lines,i)函数时获取的是lines的第i个(θ−ρ) 组,θ 为弧度制。由于后面要用到的获取放射变换矩阵需要角度为角度制,故cvAng做一下转换。
CvMemStorage *storage=cvCreateMemStorage();
CvSeq *lines=NULL;
lines=cvHoughLines2(canImage,storage,CV_HOUGH_STANDARD,1,CV_PI/180,20,0,0);
//统计与竖直夹角<30度的直线个数以及其夹角和
int numLine=0;
float sumAng=0.0;
for(int i=0;i<lines->total;i++)
{
float *line=(float *)cvGetSeqElem(lines,i);
float theta=line[1];
if(theta<30*CV_PI/180 || (CV_PI-theta)<30*CV_PI/180 )
{
numLine++;
sumAng=sumAng+theta;
}
}
//计算出平均倾斜角,anAng为角度制
float avAng=(sumAng/numLine)*180/CV_PI; - 获取二维放射变换矩阵并且对图像进行旋转,要求旋转后的图像保留原图像的全部内容,以免有数字部分被切掉。
- 这部分可以参考这篇文章,写得非常详细:
【OpenCV】图像几何变换:旋转、缩放、斜切
//获取二维旋转的仿射变换矩阵
CvPoint2D32f center;
center.x=float (RowImage->width/2.0);
center.y=float (RowImage->height/2.0);
float m[6];
CvMat M = cvMat( 2, 3, CV_32F, m );
cv2DRotationMatrix( center,avAng,1, &M);
//建立输出图像RotateRow
double a=sin(sumAng/numLine);
double b=cos(sumAng/numLine);
int width_rotate=int (RowImage->height*fabs(a)+RowImage->width*fabs(b));
int height_rotate=int (RowImage->width*fabs(a)+RowImage->height*fabs(b));
IplImage *RotateRow=cvCreateImage(cvSize(width_rotate,height_rotate),IPL_DEPTH_8U,1);
//变换图像,并用黑色填充其余值
m[2]+=(width_rotate-RowImage->width)/2;
m[5]+=(height_rotate-RowImage->height)/2;
cvWarpAffine(RowImage,RotateRow, &M,CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS,cvScalarAll(0));- 最后释放内存,并且返回旋转后的图像RotateRow。storage也需要释放。
cvReleaseImage(&canImage);
cvReleaseMemStorage(&storage);
return RotateRow;