版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/ZhtSunday/article/details/52093165
如果图片中有多行数据,在将每个数字识别分割出来之前我们应该对图片进行分行操作。以免分割出的数字发生混乱。
1.实现方法
采用投影法,将每一行的数字横向投影。
就像这样
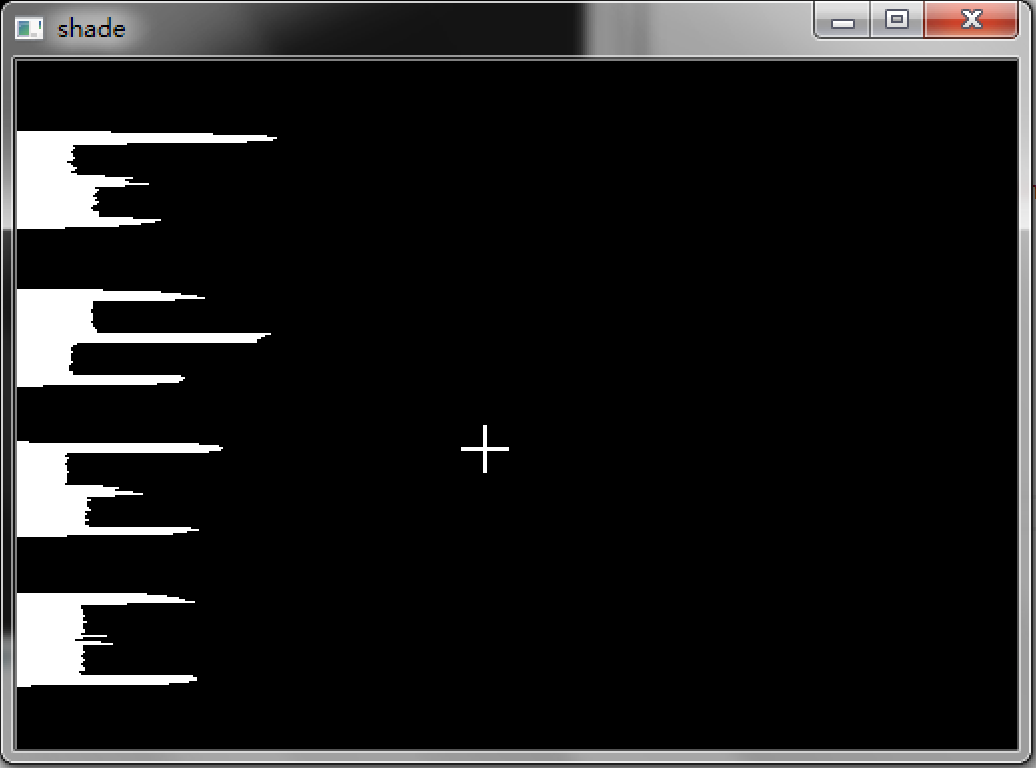
但是在实际的操作中我发现其实并没有必要将投影图建立出来,只要有了每一行的白色像素数就够了。
2.代码
本段代码的输入图像是用上一篇文章的方法生成的二值图BinaryImage。这里要注意的是,如果将二值图储存再读取之后,建议重新二值化,否则很多像素将不再是标准的0或者255。
/********************行分割子程序*********************/
//函数名称:int CutRow(IplImage *BinaryImage)
//功能:行分割
//入口参数:二值化图像BianryImage
//出口参数:行数Row
//生成:行图像Row1.2.3...
/***************************************************/
int CutRow(IplImage *BinaryImage)
{
CvSize pSize;
pSize.width=BinaryImage->width;
pSize.height=BinaryImage->height;
int *rowwidth=new int[pSize.height];
//建立数组rowwidth用来存储每行白色像素数
memset(rowwidth,0,pSize.height*sizeof(int));
double val;
for(int i=0;i<pSize.height;i++)
{
for(int j=0;j<pSize.width;j++)
{
val=cvGetReal2D(BinaryImage,i,j);
//统计白色的像素
rowwidth[i]=rowwidth[i]+1;
}
}
//查找分行位置
int *DivLoc=new int[10];
memset(DivLoc,0,10*sizeof(int));
int RowNum=0;
for(int i=1;i<pSize.height;i++)
{
if(rowwidth[i-1]>=10 && rowwidth[i]<10)
{
DivLoc[RowNum]=i;
RowNum++;
}
}
//按行分割图像
RowNum=0;
while(DivLoc[RowNum])
{
char *LinePath=(char *)malloc(30*sizeof(char));
if(LinePath==NULL)
{
printf("行图片路径内存分配失败");
exit(1);
}
//确定矩形(留5像素边)
if(RowNum==0)
RectLine=cvRect(0,0,pSize.width,DivLoc[RowNum]+5);
else
RectLine=cvRect(0,DivLoc[RowNum-1]+5,pSize.width,DivLoc[RowNum]-DivLoc[RowNum-1]);
IplImage *RowImage=cvCreateImage(cvSize(RectLine.width,RectLine.height),IPL_DEPTH_8U,1);
cvSet(RowImage,cvScalar(0),0);
cvSetImageROI(BinaryImage,RectLine);
cvCopy(BinaryImage,RowImage);
cvResetImageROI(BinaryImage);
//保存分行图像
sprintf(LinePath,"C:\\picture\\biao2\\Row%d.jpg",RowNum+1);
cvSaveImage(LinePath,RowImage);
cvReleaseImage(&RowImage);
free(LinePath);
LinePath=NULL;
RowNum++;
}
delete DivLoc;
delete rowwidth;
return RowNum;
}3.解析
- 首先建立rowwidth数组用来存储每行白色的像素数。
CvSize pSize;
pSize.width=BinaryImage->width;
pSize.height=BinaryImage->height;
int *rowwidth=new int[pSize.height];
//建立数组rowwidth用来存储每行白色像素数
memset(rowwidth,0,pSize.height*sizeof(int));
double val;
for(int i=0;i<pSize.height;i++)
{
for(int j=0;j<pSize.width;j++)
{
val=cvGetReal2D(BinaryImage,i,j);
if (val==255.0)
//统计白色的像素
rowwidth[i]=rowwidth[i]+1;
}
}- 用DivLoc数组储存分行的位置,如果前一行白色像素数>=10而后一行>10,则判定为分行位置。
//查找分行位置
int *DivLoc=new int[10];
memset(DivLoc,0,10*sizeof(int));
int RowNum=0;
for(int i=1;i<pSize.height;i++)
{
if(rowwidth[i-1]>=10 && rowwidth[i]<10)
{
DivLoc[RowNum]=i;
RowNum++;
}
}- 将图像按行分割。每次循环确定一个仅包含该行的感兴趣区域,将该区域拷贝到新的图像,并且以Row1.jpg Row2.jpg为名称存储在指定位置。用LinePath给每次分割出的行图像分配存储路径。注意在每次循环中均建立一个新的RowImage、LinePath也要在每个循环中释放RowImage和LinePath。
RowNum=0;
while(DivLoc[RowNum])
{
//LinePath是行图像的存储路径,每次循环发生改变
char *LinePath=(char *)malloc(30*sizeof(char));
if(LinePath==NULL)
{
printf("行图片路径内存分配失败");
exit(1);
}
CvRect RectLine;
//确定感兴趣区域的范围
if(RowNum==0)
RectLine=cvRect(0,0,pSize.width,DivLoc[RowNum]+5);
else
RectLine=cvRect(0,DivLoc[RowNum-1]+5,pSize.width,DivLoc[RowNum]-DivLoc[RowNum-1]);
IplImage *RowImage=cvCreateImage(cvSize(RectLine.width,RectLine.height),IPL_DEPTH_8U,1);
cvSet(RowImage,cvScalar(0),0);
cvSetImageROI(BinaryImage,RectLine);
cvCopy(BinaryImage,RowImage);
cvResetImageROI(BinaryImage);
//保存分行图像
sprintf(LinePath,"C:\\picture\\biao2\\Row%d.jpg",RowNum+1);
cvSaveImage(LinePath,RowImage);
cvReleaseImage(&RowImage);
free(LinePath);
LinePath=NULL;
RowNum++;
}- 最后记得释放内存!返回行数待用。
delete DivLoc;
delete rowwidth;
return RowNum;


