1、实现代码##
Q = 0.00001
R = 0.1
P_k_k1 = 1
Kg = 0
P_k1_k1 = 1
x_k_k1 = 0
ADC_OLD_Value = 0
kalman_adc_old = 0
def kalman(ADC_Value):
global kalman_adc_old
global P_k1_k1
Z_k = ADC_Value
if (abs(kalman_adc_old-ADC_Value)>=80):
x_k1_k1= ADC_Value*0.382 + kalman_adc_old*0.618
else:
x_k1_k1 = kalman_adc_old;
x_k_k1 = x_k1_k1
P_k_k1 = P_k1_k1 + Q
Kg = P_k_k1/(P_k_k1 + R)
kalman_adc = x_k_k1 + Kg * (Z_k - kalman_adc_old)
P_k1_k1 = (1 - Kg)*P_k_k1
P_k_k1 = P_k1_k1
ADC_OLD_Value = ADC_Value
kalman_adc_old = kalman_adc
return kalman_adc
2、仿真结果##
运行下述程序:
import numpy as np
import matplotlib.pyplot as plt
Q = 0.00001
R = 0.1
P_k_k1 = 1
Kg = 0
P_k1_k1 = 1
x_k_k1 = 0
ADC_OLD_Value = 0
kalman_adc_old = 0
def kalman(ADC_Value):
global kalman_adc_old
global P_k1_k1
Z_k = ADC_Value
if (abs(kalman_adc_old-ADC_Value)>=30):
x_k1_k1= ADC_Value*0.382 + kalman_adc_old*0.618
else:
x_k1_k1 = kalman_adc_old;
x_k_k1 = x_k1_k1
P_k_k1 = P_k1_k1 + Q
Kg = P_k_k1/(P_k_k1 + R)
kalman_adc = x_k_k1 + Kg * (Z_k - kalman_adc_old)
P_k1_k1 = (1 - Kg)*P_k_k1
P_k_k1 = P_k1_k1
ADC_OLD_Value = ADC_Value
kalman_adc_old = kalman_adc
return kalman_adc
a= [100]*200
array = np.array(a)
s = np.random.normal(0, 25, 200)
test_array = array + s
plt.plot(test_array)
adc=[]
for i in range(200):
adc.append(kalman(test_array[i]))
plt.plot(adc)
plt.plot(array)
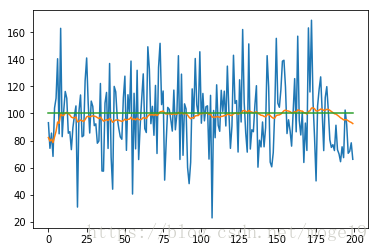
运行结果
绿线为原值,黄线为滤波后的数据,蓝线为加入噪声的数据。
3、改进版##
import numpy as np
import matplotlib.pyplot as plt
class kalman_filter:
def __init__(self,Q,R):
self.Q = Q
self.R = R
self.P_k_k1 = 1
self.Kg = 0
self.P_k1_k1 = 1
self.x_k_k1 = 0
self.ADC_OLD_Value = 0
self.Z_k = 0
self.kalman_adc_old=0
def kalman(self,ADC_Value):
self.Z_k = ADC_Value
if (abs(self.kalman_adc_old-ADC_Value)>=60):
self.x_k1_k1= ADC_Value*0.382 + self.kalman_adc_old*0.618
else:
self.x_k1_k1 = self.kalman_adc_old;
self.x_k_k1 = self.x_k1_k1
self.P_k_k1 = self.P_k1_k1 + self.Q
self.Kg = self.P_k_k1/(self.P_k_k1 + self.R)
kalman_adc = self.x_k_k1 + self.Kg * (self.Z_k - self.kalman_adc_old)
self.P_k1_k1 = (1 - self.Kg)*self.P_k_k1
self.P_k_k1 = self.P_k1_k1
self.kalman_adc_old = kalman_adc
return kalman_adc
if __name__ == '__main__':
kalman_filter = kalman_filter(0.001,0.1)
a= [100]*200
array = np.array(a)
s = np.random.normal(0, 15, 200)
test_array = array + s
adc=[]
for i in range(200):
adc.append(kalman_filter.kalman(test_array[i]))
plt.plot(adc)
plt.plot(array)
plt.plot(test_array)
plt.show()