版权声明:本文为博主原创文章,遵循 CC 4.0 by-sa 版权协议,转载请附上原文出处链接和本声明。
本文链接:https://blog.csdn.net/moge19/article/details/81750731
————————————————
用python实现并对其进行仿真,详见博文
https://blog.csdn.net/moge19/article/details/82531119
利用FFT分析卡尔曼滤波与低通滤波详见博文:
https://blog.csdn.net/moge19/article/details/87389728
卡尔曼滤波算法的推导过程详见博文:
https://blog.csdn.net/moge19/article/details/89464151
————————————————
卡尔曼滤波,最最容易理解的讲解.找遍网上就这篇看懂了.
https://blog.csdn.net/phker/article/details/48468591
学习卡尔曼滤波看了4天的文章,硬是没看懂.后来找到了下面的文章一下就看懂了.
我对卡尔曼滤波的理解,
我认为,卡尔曼滤波就是把统计学应用到了滤波算法上.
算法的核心思想是,根据当前的仪器"测量值" 和上一刻的 "预测量" 和 "误差",计算得到当前的最优量. 再 预测下一刻的量,
里面比较突出的是观点是. 把误差纳入计算, 而且分为预测误差和测量误差两种.通称为 噪声.
还有一个非常大的特点是,误差独立存在, 始终不受测量数据的影响.

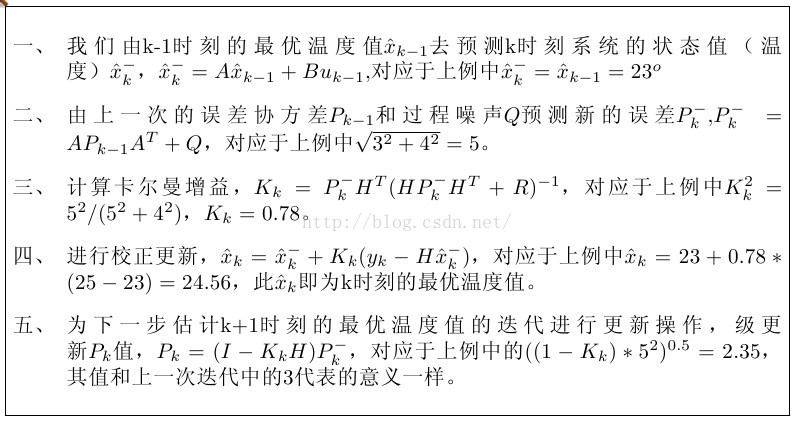
上面的ppt有助于入门理解.
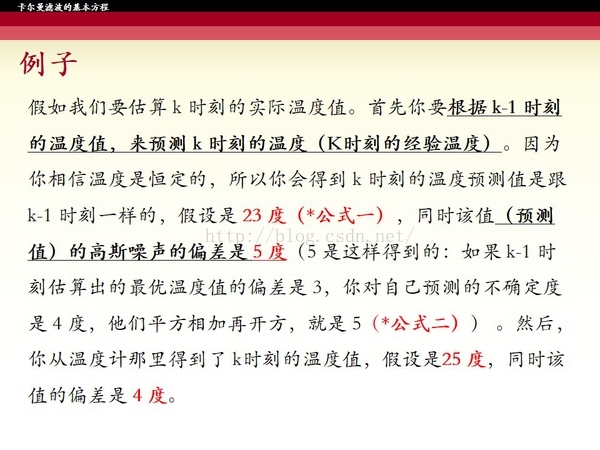
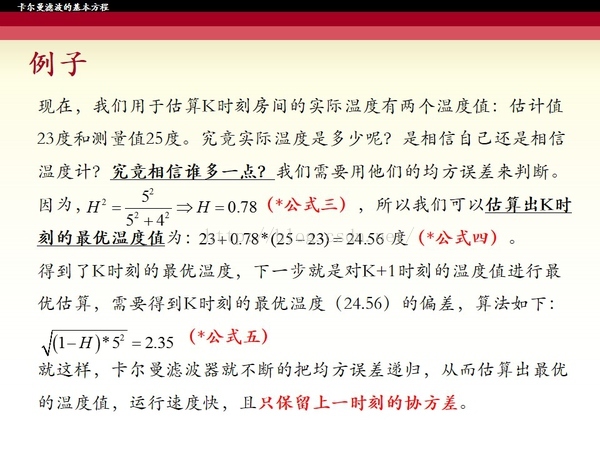
但是在编程的时候你会发现,解释里面的数值23 没有很明确的指出,是指的那个时刻的23 是预测的23 还是上一课测量的23
下面这段文字会有助于你更清晰的理解
卡尔曼滤波是统计学的程序表达.
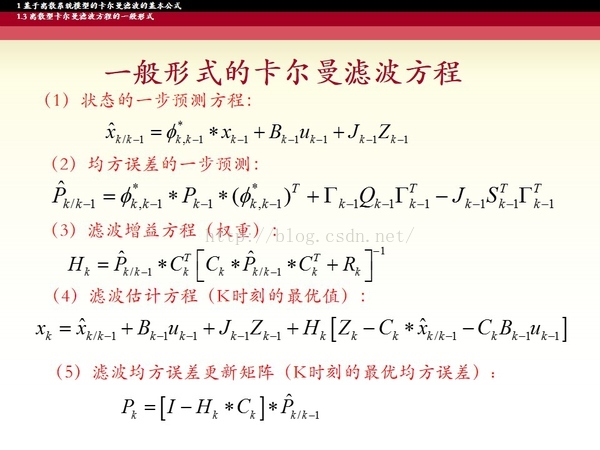
要想深入理解,公式三 协方差的背后意义 需要学习统计学.
如果仅仅是使用的话,这5个公式套进程序里面还是很容易的.
看到这里如果你明白了原理, 你再回过头看看,会发现.误差是独立存在的. 误差不受数据的影响. 误差按照统计学的协方差公式更新, 跟数据无关.
而且误差是不断变化的.
应用:基于双卡尔曼滤波算法的电池SOC估计
版权声明:本文为博主原创文章,遵循 CC 4.0 by-sa 版权协议,转载请附上原文出处链接和本声明。
本文链接:https://blog.csdn.net/hangh13/article/details/51991621
