摘要
在今天允许提供基于位置的服务的通信系统中,位置信息的可用性已经成为一个关键因素。在室外环境下,得益于GPS系统和独立蜂窝系统,移动终端定位能够达到很高的精确度。然而,在室内及具有深度阴影效应的环境下,常使卫星和蜂窝信号中断,定位就很成问题了。本文介绍室内和室外定位的不同技术和方法,重点介绍室内定位的方法和概念。此外,我们将在本文中讨论不同的基于定位技术的应用。最后,从准确性、成本、复杂性、安全性、可伸缩性等方面对面临的挑战进行讨论。
这项调查的目的是全面概述现有的工作,以及未来室内环境调查工作的有利和预期方面。
索引词
定位,协同定位,数据融合,SLAM,协同定位,超宽带(UWB),博弈论,无线传感器网络(WSN)和定位服务(LBS)
1:引言
现代通信系统旨在提供高数据率和无处不在的服务覆盖。现在,基站掌握的移动终端或非定位设备(UD)的可用的定位信息,即运营商所掌握的信息,已经成为使通信系统能够提供新的基于位置的服务的关键因素。
通常的定位技术是基于到达时间(ToA)、到达时差(TDoA)、接收信号强度(RSS)和到达角度(AoA)。在室外情况下,UD的位置可以从全球导航卫星系统(GNSS),如全球定位系统(GPS),或从独立的蜂窝系统获得且精度很高。然而,这些定位系统在卫星或蜂窝信号中断的室内环境中严重退化,或可能完全失效,在具有深度阴影效果的场景中亦是如此。针对这一问题已经提出了各种方法和方法来。其中混合定位是一种著名的定位方法,具有足够的精度和覆盖率[3]。在这方面,已有大量文献提及。
室内场景定位的另一个潜在候选方案是将不同的无线接入技术结合(如3G和4G等蜂窝系统,WLAN和WiMAX),事实上,基于蜂窝网络和无线局域网网络组合的技术最近越来越受到关注,然而,虽然任何定位技术都可以在室内场景和同构网络中使用,但这些技术的组合以及在此类场景中可以使用的最小参考节点数量(AN)都存在实际限制,例如,在许多情况下,只有一两个AN能够与UD通信。
2:室内环境下定位的限制
位置信息通常由全球导航卫星系统提供,比如GPS,GNSS。前面已经说到,定位精度收到环境的影响很大,特别是在室内场景或密集的城市地区,由于与所需卫星的连接中断,使用GNSS(格洛纳斯)进行定位可能不准确甚至不可能。因此,必须采用可选的定位算法来高精度地估计UD的位置
通常,这些定位策略由两个阶段组成,第一阶段(测距阶段),参考节点(AN)使用距离相关的信号相联系,比如RSS、ToA、AoA等,来估计出自己的位置。然后,在第二阶段,节点利用已知的参考节点的位置和在测距阶段获得的信息来计算自己的坐标。然后就可通过建模带噪ToA、AoA或RSS测量值对测距质量的影响来定义节点定位精度的基本限制。
基本的定位技术都有其局限性。ToA/TDoA需要至少3个基站(或ANs)。AoA至少需要两个基站。AoA技术的性能在很大程度上取决于AoA测量中相对较小的误差所造成的位置估计误差。它们受到载波频率和阵列大小的限制,因此,通常用于定位精度要求较低的场景中。此外,AoA系统对角多径敏感,而这在室内环境中是常有的。因此,ToA技术在城市地区更受青睐(由于多径效应),而AoA技术在空旷地区更受青睐。
留意用于定位的不同接入技术,我们还可以看到各种限制。例如,对WLAN定位适宜性的实证分析表明,即使能够达到合理精度,仍然会出现显著的误差。误差主要是由于无线信号的动态传播引起的具有相似无线电签名的不同位置的存在,如指纹或接收到的信号强度。因此,这被认为是纯基于wlan的技术的一个基本限制。
室内基本定位技术
定位方法是基于已知位置的参考节点的距离估计和节点间的测量,节点协作增强了位置估计,当传统的定位技术不能产生准确的估计时,这是最有利的。
线性最小二乘法是一种简单的位置估计方法。理想情况下,未知节点应该位于至少三个圆的交汇处,中心在锚节点上,半径等于到每个锚节点的距离。然而,由于不太可能得到一个相交点,因此使用最小二乘优化来最小化残差平方和。因此,该问题成为一个非线性优化问题,需要适当的初始估计[19]。由于非线性优化的计算代价昂贵,因此可以使用线性化表达式等替代方法来使用LLS估计位置。虽然这不是位置估计的最优解,但它在复杂度较低的情况下获得了较好的精度
在接下来的文章中,我们将简要介绍在同构网络环境中使用的基本独立定位技术
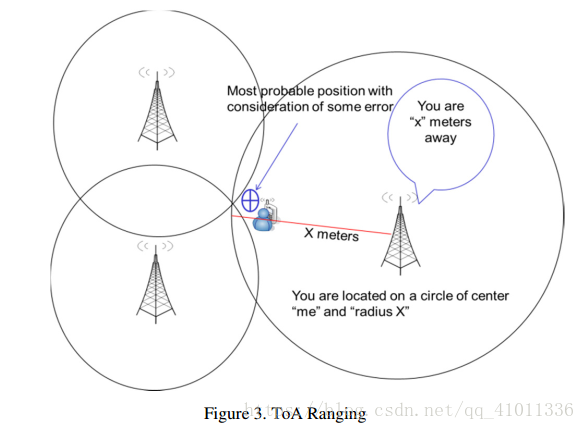
time of arrival(TOA)
ToA方法计算信号从UD到ANs所需要的时间,UD在一个以AN为中心的圆周上,通过ToA测量的到达时间可以计算出圆半径d。因此,为了检测UD的确切位置,至少需要3个ANs。在本例中,UD的估计位置仅在三个圆的相交区域(如果存在的话)内,如图所示。然后,通过LS或加权最小二乘法(WLS)等任何滤波技术都可以很容易地得到实际的估计位置
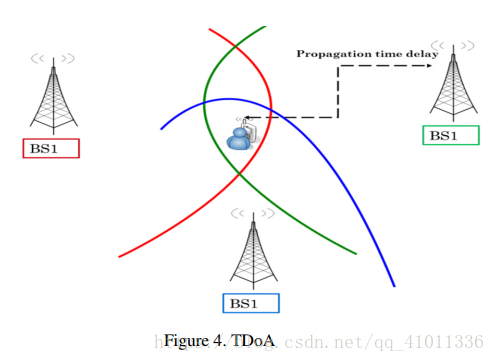
Time Difference of Arrival (TDoA)
通过测量移动终端到不同发送端的时间差从而估计到不同终端的距离之差进而进行定位。由于不需要检测信号传输时间,系统对时间同步的要求大大降低。
TDOA至少需要三个已知坐标位置的基站,通过获取不同基站之间的信号传送时间差来定位。假设三个基站坐标分别已知,以第一个基站为标准,分别得到第二个基站与第一个基站的时间差t1,第三个基站与第一个基站的时间差t2,信号时间差乘以电磁波传播速度,得到距离差和,距离差是已知常量。当我们忽略实际情况中存在的信号误差,TDOA实际上归结求解两根双曲线的交点:
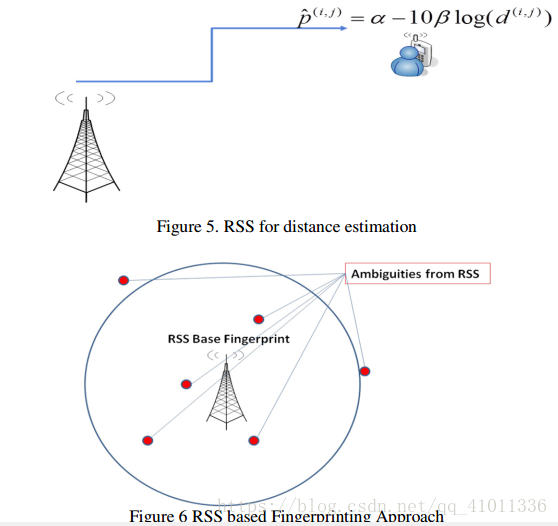
RSS(Received Signal Strength) based Fingerprinting
RSS方法主要包括两种方法:路径丢失对数正规阴影模型推导三元模型和RSS位置指纹方法。第一种方法是基于路径损失对数正规阴影模型估计BS和UD之间的距离,如图5所示。然后,使用三边测量法用至少3颗AN估计UD的位置。另一方面,基于RSS的位置指纹技术首先采集场景的RSS指纹,如图6所示,然后通过将在线测量值与数据库中与测量值相对应的最接近的位置进行匹配来估计UD的位置。因此,对于每个可能的位置,可能存在歧义点,导致独立定位场景中存在较高的估计误差。位置指纹技术可参见https://www.cnblogs.com/rubbninja/p/6120964.html
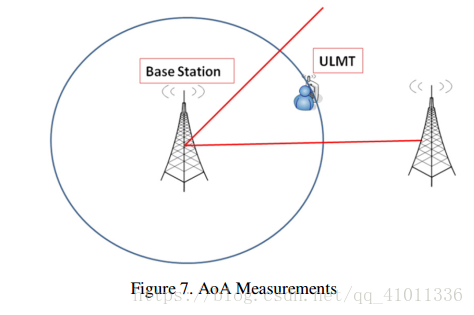
Angle of Arrival (AoA)
该技术计算信号从UD到ANs的角度,然后绘制UD可能存在的区域,如图7所示。基本上,这个区域是一条与ANs有一定角度的直线,虽然估计UD的位置至少需要两个ANs,但如果AoA估计中出现一个小的误差,位置估计误差可能会很大。因此,基于AoA的技术对于定位效果有限,除非它与大型天线阵列一起使用。
混合方法Hybrid techniques
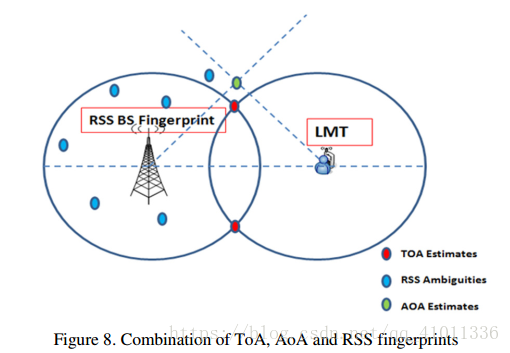
近年来,混合协同的移动定位技术作为一种新的无线定位技术出现;协同定位的核心思想是利用可靠的短程测量来提高无线系统位置估计的准确性。不同组合的基本独立定位技术(RSS、ToA、TDoA、AoA等)已被实现,以提高定位估计的准确性。例如,结合ToA、AoA和RSS的位置指纹方法,如图8所示,提供了UDs的初始估计。与单独使用ToA或TDoA相比,混合ToA/TDoA和RSS在位置估计精度方面进一步提高
独立定位技术的常见缺陷
一般情况下,独立定位技术存在着影响定位精度的缺陷。例如,ToA技术要求在UD上有准确的定时参考,并且在这个参考和参考节点的时钟之间同步。显然,实现这一任务具有很高的挑战性;其实现将会导致移动设备成本和尺寸的增加。此外,TDoA方法需要对移动设备的软件进行显著的改变,同时还需要进一步的硬件安装。TDoA要求在UD上完成处理,并将估计的位置发送到反向链接上的系统。因此,为了满足估计和同步需求,手机的体积和成本将会增加。此外,RSS技术也存在一些缺陷,如在室内场景中发射机和接收机之间难以满足LOS。因此,室内环境下的多径效应会影响定位精度。路径损耗模型也用于定位,但是,阴影和多径衰落影响了这些模型的准确性。在这种情况下,通过使用以接收器为中心的预先测量的RSS轮廓,或者使用在几个BSs上进行的许多测量,可以提高准确度。利用基于模糊逻辑算法的RSS测量方法,可以提高定位精度。此外,AoA技术也存在一些缺陷,如硬件需求的复杂性以及当UD离开测量单元时定位精度的降低。