基于LED的室内定位算法大致可以分为四类:
1. 几何测量法
这种方法需要估计接收端到己知LED灯的几何关系(距离或角度信息等),再通过计算获取待定位点的位置坐标。根据几何关系获取的信息,-般有RSS三边定位、AOA角度定位和TDOA双曲线定位等。
2. 场景分析法
送类定位算法又称为指纹定位法它通过分析场景中的特征来估计终端的坐标。一般分为两个阶段,离线数据库建立阶段和在线定位阶段。离线数据库建立阶段将每一个采样点(又称为指纹)的位置信息存储起来,建立与移动设备之间的对应关系。在线定位阶段通过匹配指纹库中的信息实时的确定目标位置。
3. 近似感知法
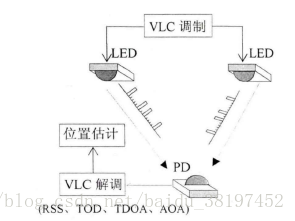
又称为基于非测距技术的算法,无需计算节点间的角度与距离信息,利用节点间的邻近关系及连通性实现定位。例如将布置在室内的LED阵列作为一个信息发送端,用户终端进入通信范困内时就可以获得该灯的位置信息进而确定用户自身位置坐标。一般有广告牌法和质心算法,广告牌法直接将接入点LED的的位置作为用户的位置,而质心算法将所有LED的位置进行加权运算后作为用户的位置,精度比广告牌法相对要高。
4. 图像传感器成像法
这种算法是在一个平行于LED灯和图像传感器之间的平面上放置一个透镜,发射点、透镜中心和接收点保持在同一条直线上,利用几何关系计算出待定位点坐标。
主要浅析几何测量法:
RSS定位算法、TOA定位算法、TDOA定位算法、AOA定位算法
1.TOA(time of arrival) 到达时间

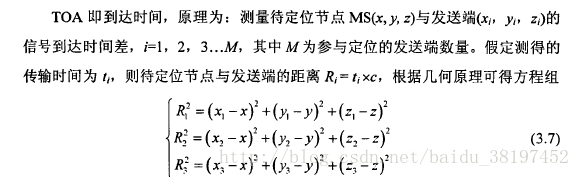
在TOA定位算法中影响定位精度的主要因素为测量误差,因为光的传输速率非常快,微小的时间检测误差也会导致很大的距离估计误差。另外时钟同步也是引起定位误差的原因,如果接收端与发送端无法做到精确的时钟同步,也会导致很大的定位误差,这就要求TOA定位算法需要精确的时间检测装置,硬件设备要求较高,价格更为昂贵。
虽然TOA算法原理相对简单,并且能够高精定位,但由于其代价昂贵,一般不独自应用在光定位中。
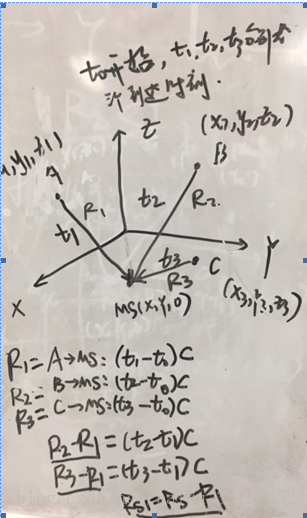
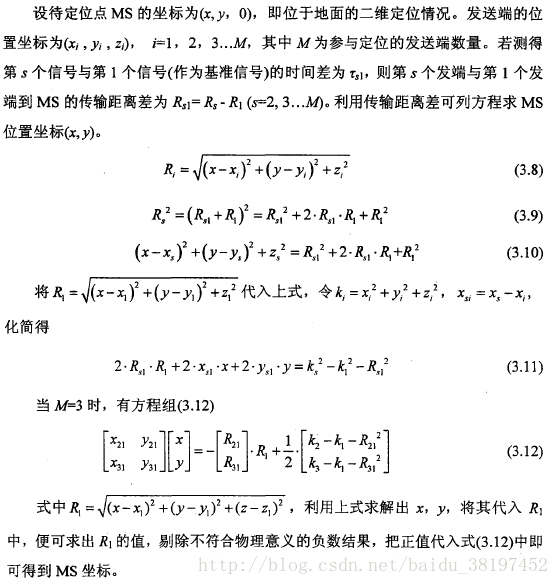
2.TDOA(Time Difference 0f Arrival)到达时间差
通过测量移动终端到不同发送端的时间差从而估计到不同终端的距离之差进而进行定位。由于不需要检测信号传输时间,系统对时间同步的要求大大降低。
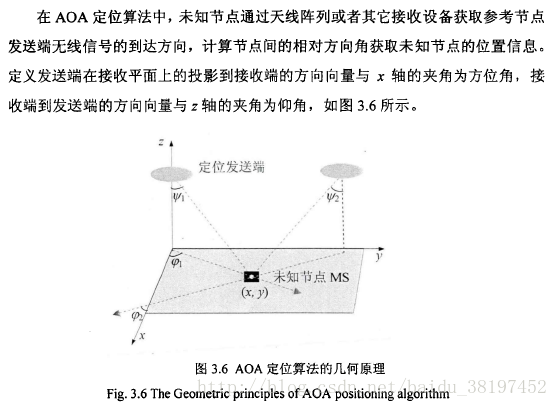
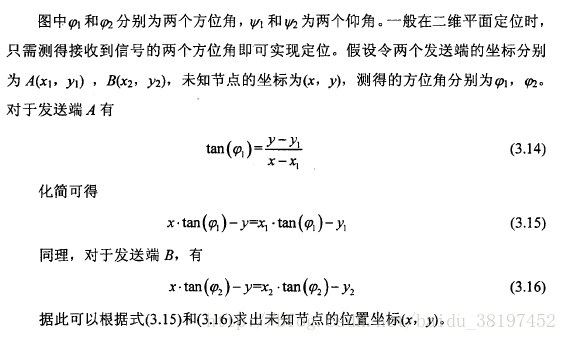
3. AOA(Angle of Arrival )到达角度
4.RSS (Received Signal Strength)接收强度
在RSS中重点在于距离的估计,有两种方法(看不懂):
- 相位检测法

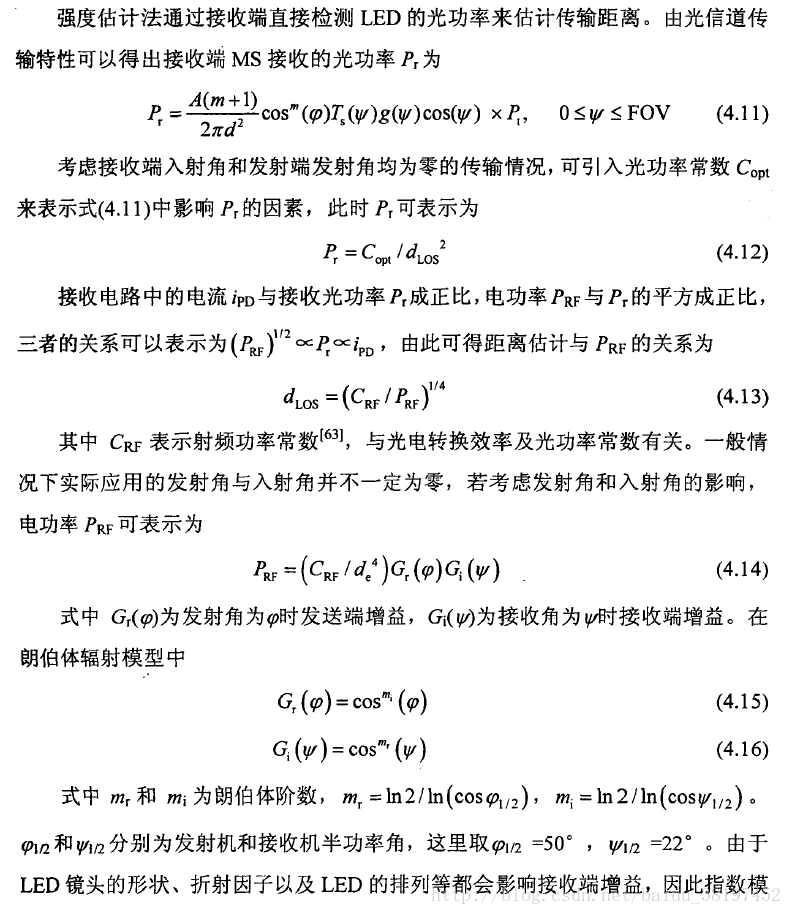
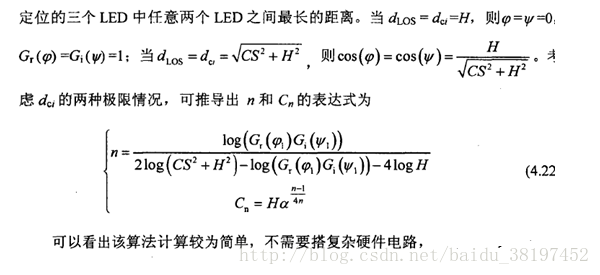
2.强度估计方法