机器人在路径规划时首先要进行的是环境的搭建,然后在此基础上利用相应的算法等路径规划..
仿真的环境一般使用的是MATLAB....
在本文的仿真的环境创建上,使用了MATLAB的rectangle()函数进行障碍物的构建的...
rectangle('position',[1,1,5,5],'curvature',[1,1],'edgecolor','r','facecolor','g');
'position',[1,1,5,5]表示从(1,1)点开始高为5,宽为5;
'curvature',[1,1]表示x,y方向上的曲率都为1,即是圆弧;
'edgecolor','r'表示边框颜色是红色;
'facecolor','g'表示面内填充颜色为绿色
这个函数的参数有:
'Position',[x,y,w,h] 表示物体设置的位置在(x,y)处,后面是宽与高..
'curvature',[1,1] 这个表示曲率,这样的参数设置表示设置为圆形
'edgecolor'与‘facecolor’是设置颜色用的....
MATLAB代码如下:
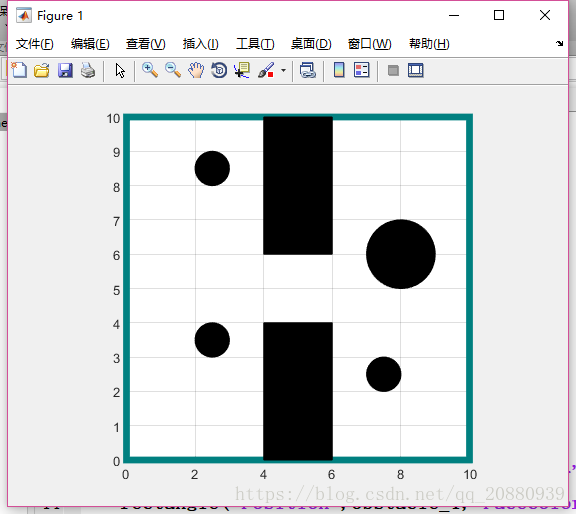
%create environment for robot traversal
%Obstacle
circle_pos1=[2 3 1 1];
circle_pos2=[7 5 2 2];
circle_pos3=[2 8 1 1];
circle_pos4=[7 2 1 1];
obs_colour=[0 0.5 0.5];
main_grid=[0 0 10 10];
obstacle_1=[4 0 2 4];
obstacle_2=[4 6 2 4];
circle_curv=[1 1]; %控制障碍物的曲率
grid on
rectangle('Position',main_grid,'EdgeColor',obs_colour,'LineWidth',5)
rectangle('Position',obstacle_1,'FaceColor','k')
rectangle('Position',obstacle_2,'FaceColor','k')
rectangle('Position',circle_pos1,'Curvature',circle_curv,'FaceColor','k')
rectangle('Position',circle_pos2,'Curvature',circle_curv,'FaceColor','k')
rectangle('Position',circle_pos3,'Curvature',circle_curv,'FaceColor','k')
rectangle('Position',circle_pos4,'Curvature',circle_curv,'FaceColor','k')
axis equal
axis([0 10 0 10]);
hold on