王超群老师路径规划研究综述视频学习笔记,原文见泡泡机器人SLAM公众号。
路径规划的概念
依据某个或某些优化准则(如工作代价、行走路线最短、行走时间最短等),在其工作空间中找到一条从起始状态到目标状态的能避开障碍物的最优路径。
路径规划分类简介
-
路径规划技术分类
静态结构化环境下的路径规划
动态已知环境下的路径规划
动态不确定环境下的路径规划
-
路径规划算法分类

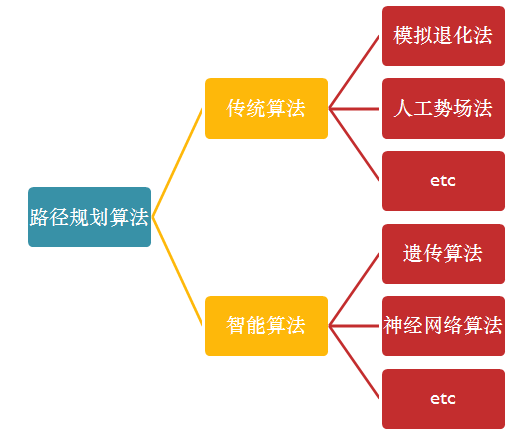
A*算法和D*算法
A*算法的特点:A*算法在理论上是时间最优的,但空间增长是指数级别的。
D*算法,应用于在动态环境下的搜索
人工势场法(APF)
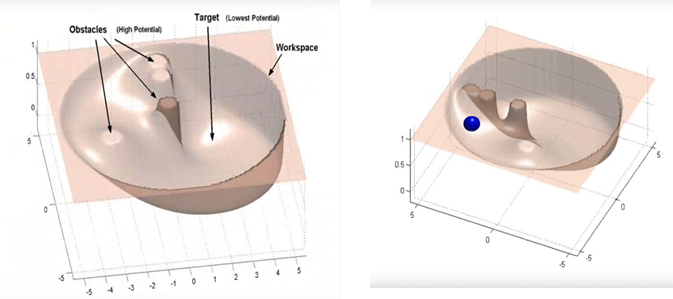
人工势场法是局部路径规划的一种常用方法。
优点:便于底层的实时控制,在实时避障和平滑的轨迹控制方面,得到了广泛的应用。
缺点:
- 当物体离目标点比较远时,引力将变得特别大,相对较小的斥力在甚至可以忽略的情况下,物体路径上可能会碰到障碍物
- 当目标点附近有障碍物时,斥力将非常大,引力相对较小,物体很难达到目标点。
- 在某个点,引力和斥力刚好大小相等,方向相反,则物体容易陷入局部最优解或震荡。
快速搜索随机树(RRT)
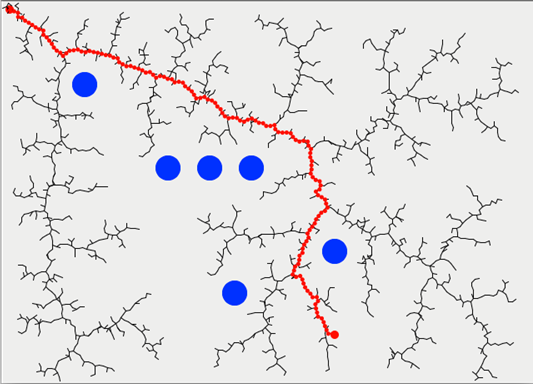
优点:复杂度主要决定于寻找路径的难度,跟整个规划场景的大小和构型空间的维数基本无关。
缺点:基本无bias的RRT会在空间随机扩展;输出路径非最优路径
NEXT
下一节需要弄清楚什么是运动规划,运动规划在机器人系统和无人驾驶系统中的位置,其与路径规划的关系。