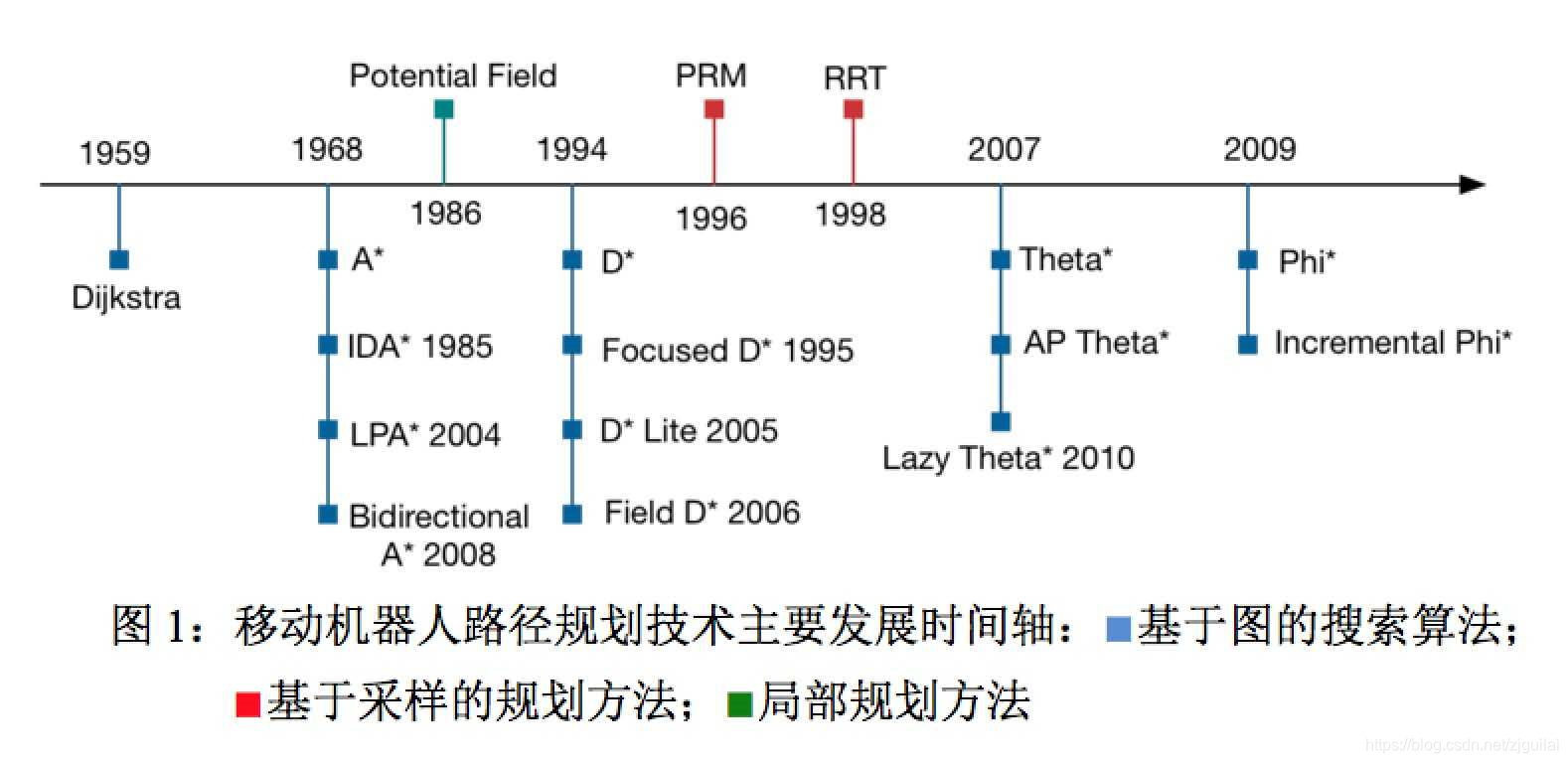
1)路径规划算法:
【1】基于采样的算法(PRM)
【2】基于节点的算法(A star ,D star,theta star)–grid map
【3】基于数学模型的算法(PNLP)
【4】生物启发式算法(cnn,bp,ACA):需要增强实时性!!!
【5】多融合算法(多数据融合,多算法融合)
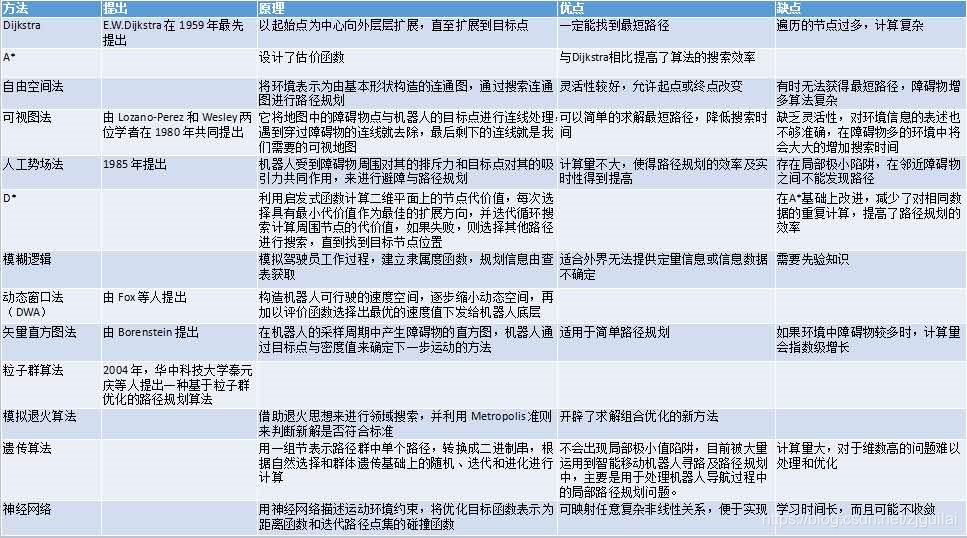
2)典型算法讲解
1.A*算法
https://blog.csdn.net/autonavi2012/article/details/80923431(参照这个博客已经很清楚了)
步骤a)
给每个节点赋值
F=G + H
G:从初始点到指定待查节点的距离;
H:从待查节点到目标节点的距离;(有多种距离量度)
把每个带检查节点放到openlist()当中
步骤b)
把openlist中最小的F值的节点,从openlist中删除,放到closelist当中;
再以closelist的当前节点作为父节点,往openlist中添加待查节点
步骤c)
结束条件:目标节点在openlist中首次出现,通过回溯,得到路径
优点:路径最短
缺点:「1」空间增长为指数级别,很难往高维空间扩展;「2」路径不过平滑,被网格化控制
2.人工势场法(局部路径规划的算法)(APF)
https://blog.csdn.net/junshen1314/article/details/50472410
优点:路径规划的比较平滑(柔性机械臂)
缺点:目标太远,引力太大,障碍物太近,到不了目标点,容易陷入局部最优解
3.快速搜索树(RRT)
https://www.cnblogs.com/21207-iHome/p/7210543.html
优点:可以往高维空间扩展,复杂度较低
缺点:基本无bias的RRT会在空间随机扩展;输出的路径非最优路径而且不平滑
改善:对路径平滑处理,加入A star的启发函数
研究方向:
1.轨迹优化:轨迹插值,多项式插值等
2.未知环境的路径规划(exploring)
3.动态环境下的路径规划
4.三维路径规划