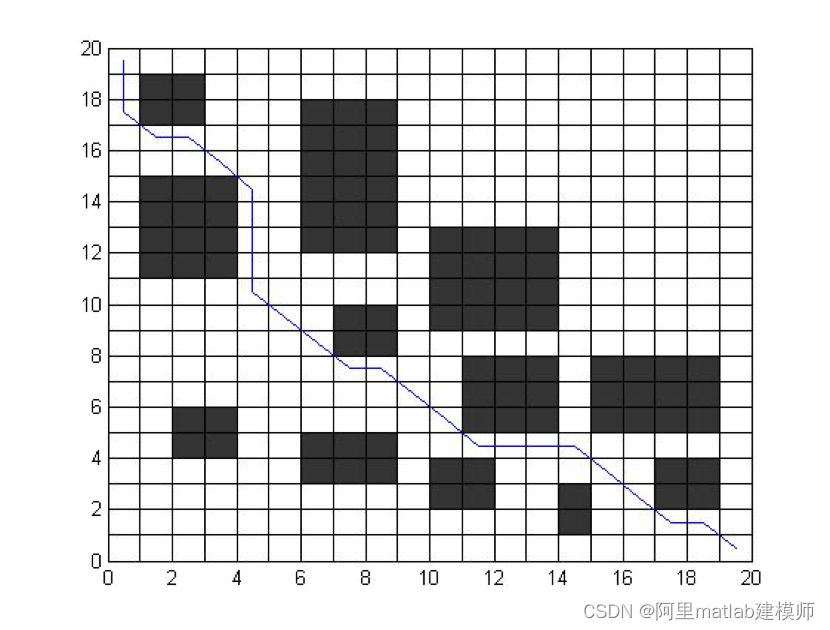
基于蚁群算法的机器人路径规划MATLAB源代码
基本思路是,使用离散化网格对带有障碍物的地图环境建模,将地图环境转化为邻接矩阵,最后使用蚁群算法寻找最短路径。
function [ROUTES,PL,Tau]=ACASPS(G,Tau,K,M,S,E,Alpha,Beta,Rho,Q)
%% ---------------------------------------------------------------
% ACASP.m
% 基于蚁群算法的机器人路径规划
%% ---------------------------------------------------------------
% 输入参数列表
% G 地形图为01矩阵,如果为1表示障碍物
% Tau 初始信息素矩阵(认为前面的觅食活动中有残留的信息素)
% K 迭代次数(指蚂蚁出动多少波)
% M 蚂蚁个数(每一波蚂蚁有多少个)
% S 起始点(最短路径的起始点)
% E 终止点(最短路径的目的点)
% Alpha 表征信息素重要程度的参数
% Beta 表征启发式因子重要程度的参数
% Rho 信息素蒸发系数
% Q 信息素增加强度系数
%
% 输出参数列表
% ROUTES 每一代的每一只蚂蚁的爬行路线
% PL 每一代的每一只蚂蚁的爬行路线长度
% Tau 输出动态修正过的信息素
%% --------------------变量初始化----------------------------------
%load
D=G2D(G);
N=size(D,1);%N表示问题的规模(象素个数)
MM=size(G,1);
a=1;%小方格象素的边长
Ex=a*(mod(E,MM)-0.5);%终止点横坐标
if Ex==-0.5
Ex=MM-0.5;
end
Ey=a*(MM+0.5-ceil(E/MM));%终止点纵坐标
Eta=zeros(1,N);%启发式信息,取为至目标点的直线距离的倒数
%下面构造启发式信息矩阵
for i=1:N
ix=a*(mod(i,MM)-0.5);
if ix==-0.5
ix=MM-0.5;
end
iy=a*(MM+0.5-ceil(i/MM));
if i~=E
Eta(1,i)=1/((ix-Ex)^2+(iy-Ey)^2)^0.5;
else
Eta(1,i)=100;
end
end
ROUTES=cell(K,M);%用细胞结构存储每一代的每一只蚂蚁的爬行路线
PL=zeros(K,M);%用矩阵存储每一代的每一只蚂蚁的爬行路线长度
%% -----------启动K轮蚂蚁觅食活动,每轮派出M只蚂蚁--------------------
for k=1:K
%disp(k);
for m=1:M
%% 第一步:状态初始化
W=S;%当前节点初始化为起始点
Path=S;%爬行路线初始化
PLkm=0;%爬行路线长度初始化
TABUkm(S)=0;%已经在初始点了,因此要排除
DD=D;%邻接矩阵初始化
%% 第二步:下一步可以前往的节点
DW=DD(W,:);
DW1=find(DW<inf);
for j=1:length(DW1)
if TABUkm(DW1(j))==0
end
end
LJD=find(DW<inf);%可选节点集
Len_LJD=length(LJD);%可选节点的个数
%% 觅食停止条件:蚂蚁未遇到食物或者陷入死胡同
while W~=E&&Len_LJD>=1
%% 第三步:转轮赌法选择下一步怎么走
PP=zeros(1,Len_LJD);
for i=1:Len_LJD
end
PP=PP/(sum(PP));%建立概率分布
Pcum=cumsum(PP);
Select=find(Pcum>=rand);
to_visit=LJD(Select(1));%下一步将要前往的节点
%% 第四步:状态更新和记录
Path=[Path,to_visit];%路径增加
PLkm=PLkm+DD(W,to_visit);%路径长度增加
W=to_visit;%蚂蚁移到下一个节点
for kk=1:N
if TABUkm(kk)==0
DD(W,kk)=inf;
DD(kk,W)=inf;
end
end
TABUkm(W)=0;%已访问过的节点从禁忌表中删除
DW=DD(W,:);
LJD=find(DW<inf);%可选节点集
Len_LJD=length(LJD);%可选节点的个数
end
%%第五步:记下每一代每一只蚂蚁的觅食路线和路线长度
ROUTES{
k,m}=Path;
if Path(end)==E
PL(k,m)=PLkm;
else
PL(k,m)=inf;
end
end
%%第六步:更新信息素
Delta_Tau=zeros(N,N);%更新量初始化
for m=1:M
if PL(k,m)<inf
ROUT=ROUTES{
k,m};
TS=length(ROUT)-1;%跳数
PL_km=PL(k,m);
for s=1:TS
x=ROUT(s);
y=ROUT(s+1);
Delta_Tau(x,y)=Delta_Tau(x,y)+Q/PL_km;
Delta_Tau(y,x)=Delta_Tau(y,x)+Q/PL_km;
end
end
end
Tau=(1-Rho).*Tau+Delta_Tau;%信息素挥发一部分,新增加一部分
end
%% ---------------------------绘图--------------------------------
plotif=0;%是否绘图的控制参数
if plotif==1
%绘收敛曲线
meanPL=zeros(1,K);
minPL=zeros(1,K);
for i=1:K
PLK=PL(i,:);
Nonzero=find(PLK<inf);
PLKPLK=PLK(Nonzero);
meanPL(i)=mean(PLKPLK);
minPL(i)=min(PLKPLK);
end
figure(1)
plot(minPL);
hold on
plot(meanPL);
grid on
title('收敛曲线(平均路径长度和最小路径长度)');
xlabel('迭代次数');
ylabel('路径长度');
%绘爬行图
figure(2)
axis([0,MM,0,MM])
for i=1:MM
for j=1:MM
if G(i,j)==1
x1=j-1;y1=MM-i;
x2=j;y2=MM-i;
x3=j;y3=MM-i+1;
x4=j-1;y4=MM-i+1;
fill([x1,x2,x3,x4],[y1,y2,y3,y4],[0.2,0.2,0.2]);
hold on
else
x1=j-1;y1=MM-i;
x2=j;y2=MM-i;
x3=j;y3=MM-i+1;
x4=j-1;y4=MM-i+1;
fill([x1,x2,x3,x4],[y1,y2,y3,y4],[1,1,1]);
hold on
end
end
end
hold on
ROUT=ROUTES{
K,M};
Rx=ROUT;
Ry=ROUT;
for ii=1:LENROUT
Rx(ii)=a*(mod(ROUT(ii),MM)-0.5);
if Rx(ii)==-0.5
Rx(ii)=MM-0.5;
end
Ry(ii)=a*(MM+0.5-ceil(ROUT(ii)/MM));
end
plot(Rx,Ry)
end
plotif2=0;%绘各代蚂蚁爬行图
if plotif2==1
figure(3)
axis([0,MM,0,MM])
for i=1:MM
for j=1:MM
if G(i,j)==1
x1=j-1;y1=MM-i;
x2=j;y2=MM-i;
x4=j-1;y4=MM-i+1;
fill([x1,x2,x3,x4],[y1,y2,y3,y4],[0.2,0.2,0.2]);
hold on
else
x1=j-1;y1=MM-i;
x2=j;y2=MM-i;
x3=j;y3=MM-i+1;
x4=j-1;y4=MM-i+1;
fill([x1,x2,x3,x4],[y1,y2,y3,y4],[1,1,1]);
hold on
end
end
end
for k=1:K
PLK=PL(k,:);
minPLK=min(PLK);
pos=find(PLK==minPLK);
m=pos(1);
ROUT=ROUTES{
k,m};
LENROUT=length(ROUT);
Rx=ROUT;
Ry=ROUT;
for ii=1:LENROUT
Rx(ii)=a*(mod(ROUT(ii),MM)-0.5);
if Rx(ii)==-0.5
Rx(ii)=MM-0.5;
end
Ry(ii)=a*(MM+0.5-ceil(ROUT(ii)/MM));
end
plot(Rx,Ry)
hold on
end
end
源代码运行结果展示