

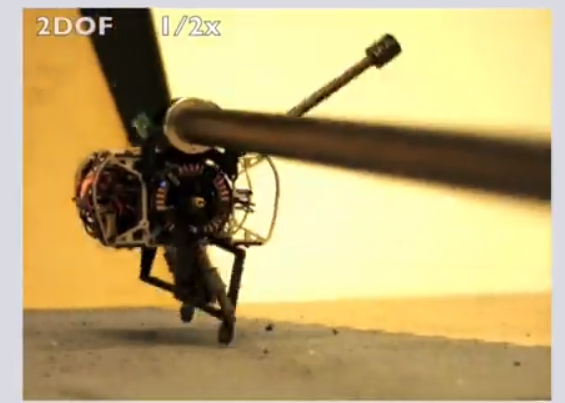
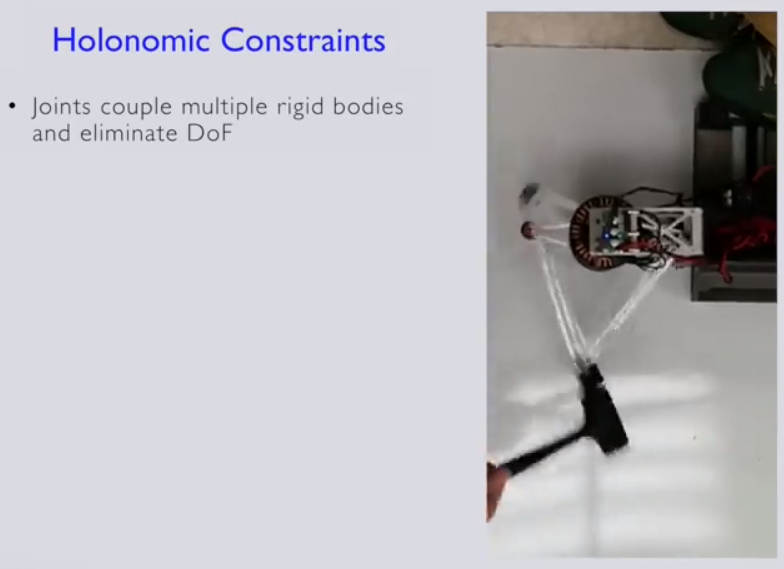
















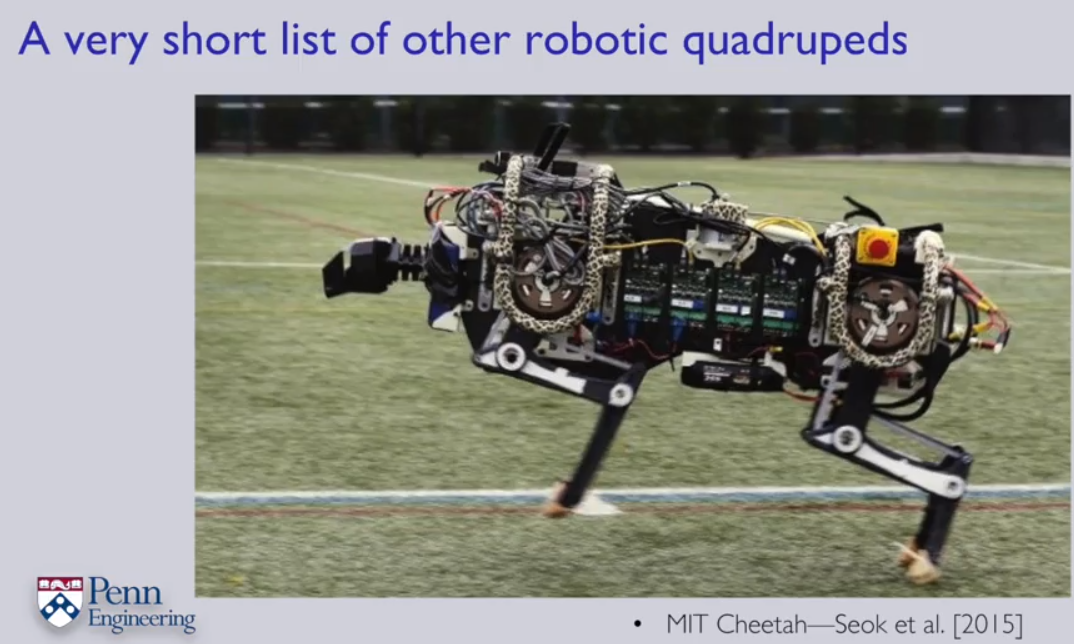


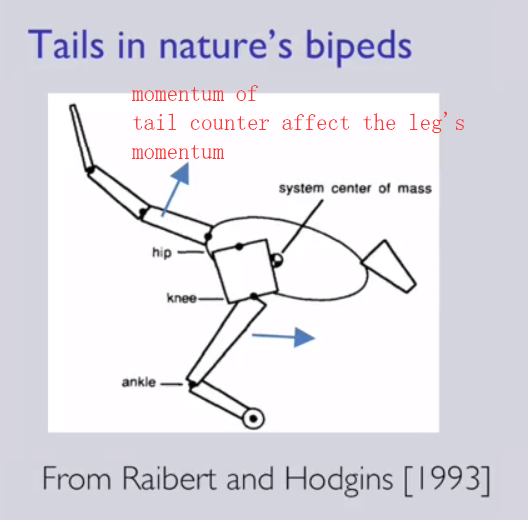
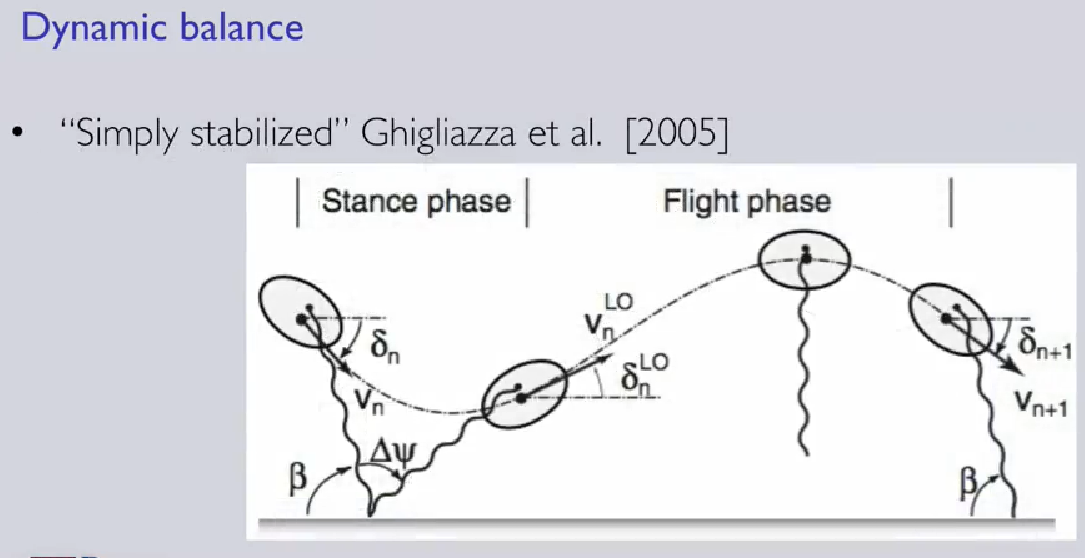
If the inertia of leg is reduced, we then dont need the tail for balancing


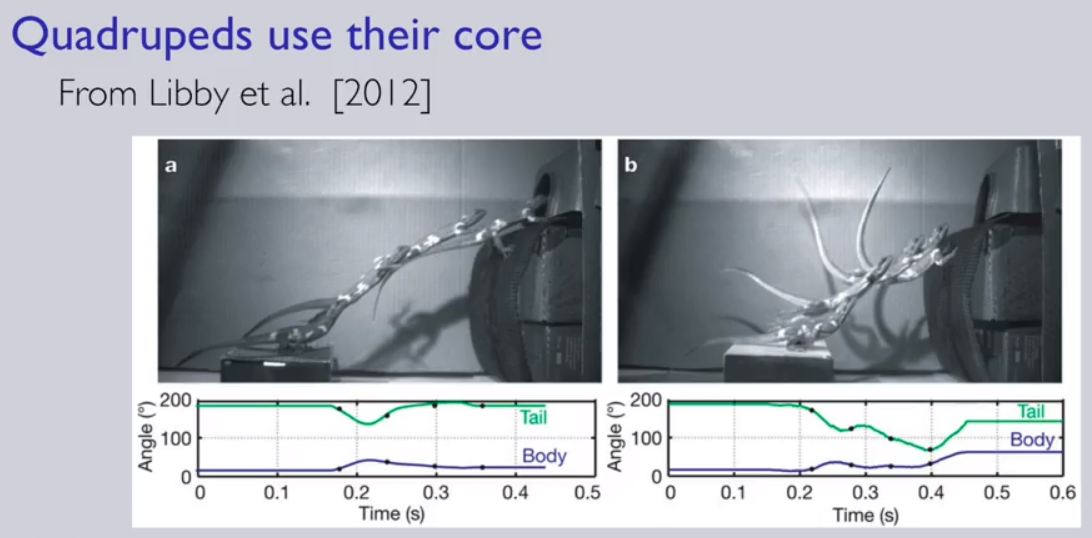
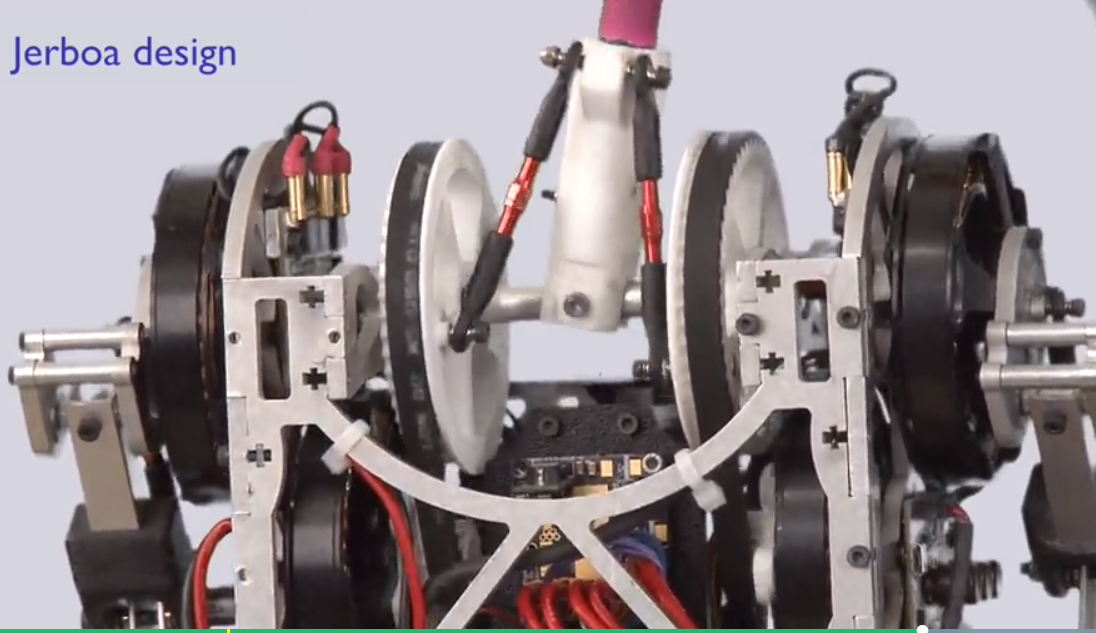
two motors controls the motion of the tail:
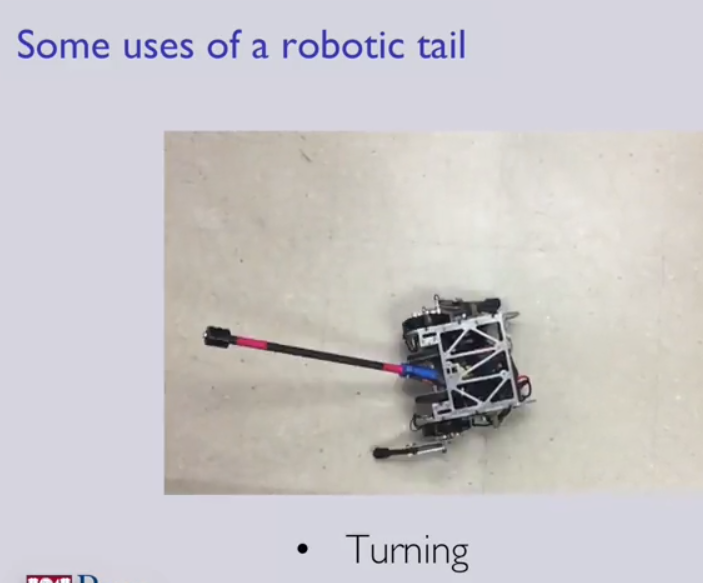
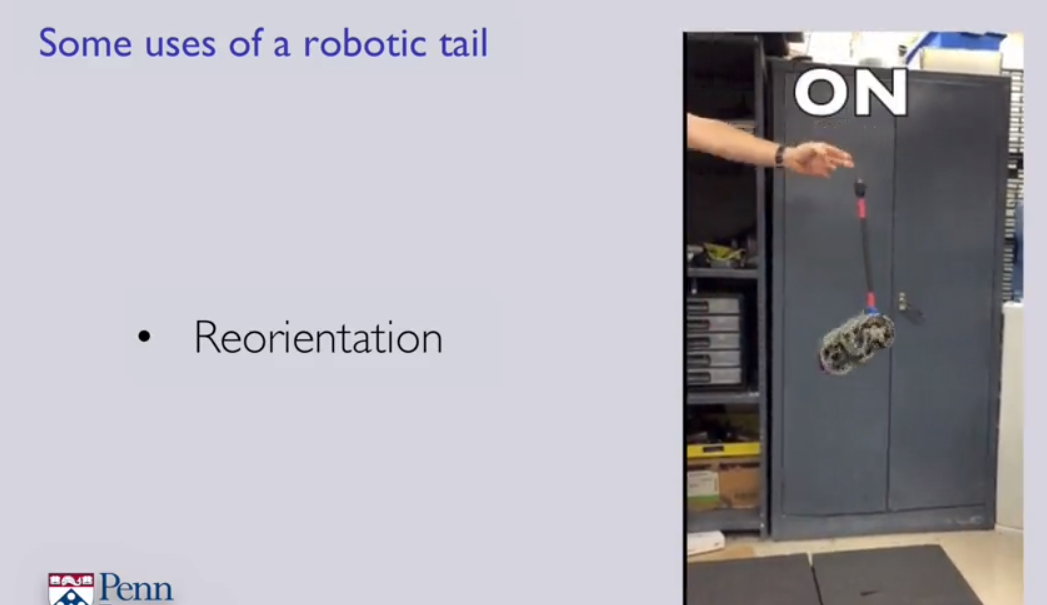
tail only takes 6% of mass, but very effectively reorientate the robot

Z
If the inertia of leg is reduced, we then dont need the tail for balancing
two motors controls the motion of the tail:
tail only takes 6% of mass, but very effectively reorientate the robot
Z