貌似机器学习最绕不过去的算法,是梯度下降算法。这里专门捋一下。
1. 什么是梯度
有知乎大神已经解释的很不错,这里转载并稍作修改,加上自己的看法。先给出链接,毕竟转载要说明出处嘛。为什么梯度反方向是函数值局部下降最快的方向?
因为高等数学都忘光了,先从导数/偏倒数/方向导数,慢慢推出梯度吧。
1.1 导数
导数的几何意义可能很多人都比较熟悉: 当函数定义域和取值都在实数域中的时候,导数可以表示函数曲线上的切线斜率。 除了切线的斜率,导数还表示函数在该点的变化率。

用图可表示为
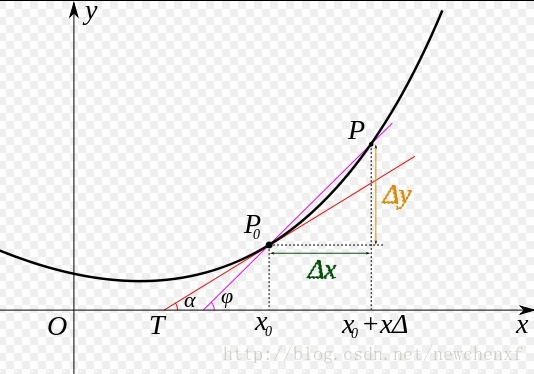
直白的来说,导数代表了在自变量变化趋于无穷小的时候,函数值的变化与自变量变化的比值代表了导数,几何意义有该点的切线。物理意义有该时刻的(瞬时)变化率…
注意在一元函数中,只有一个自变量变动,也就是说只存在一个方向的变化率,这也就是为什么一元函数没有偏导数的原因。
1.2 偏导数
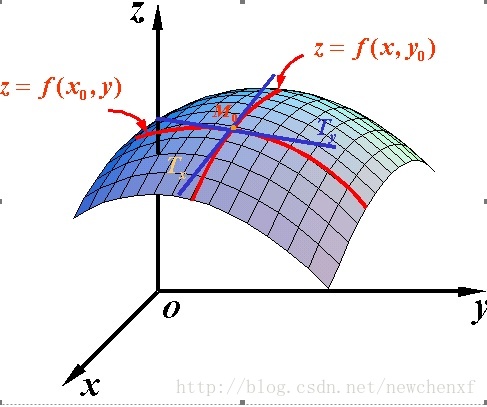
既然谈到偏导数,那就至少涉及到两个自变量,以两个自变量为例,z=f(x,y) 。从导数到偏导数,也就是从曲线来到了曲面. 曲线上的一点,其切线只有一条。但是曲面的一点,切线有无数条。
而我们所说的偏导数就是指的是多元函数沿坐标轴的变化率:
指的是函数在y方向不变,函数值沿着x轴方向的变化率
指的是函数在x方向不变,函数值沿着y轴方向的变化率
对应的图像形象表达如下:
可能到这里,读者就已经发现偏导数的局限性了,原来我们学到的偏导数指的是多元函数沿坐标轴的变化率,但是我们往往很多时候要考虑多元函数沿任意方向的变化率,那么就引出了方向导数。
1.3 方向导数
假设你站在山坡上,想知道山坡的坡度(倾斜度)
山坡图如下:
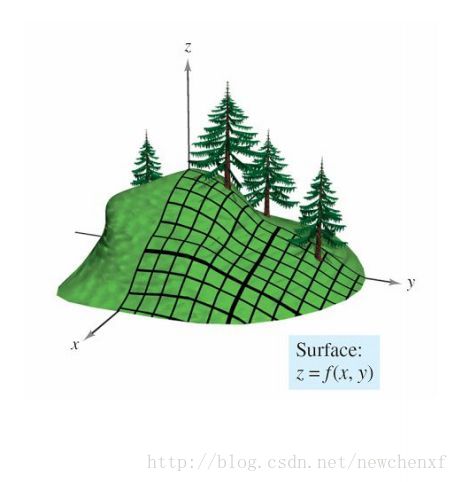
假设山坡表示为
,你应该已经会做主要俩个方向的斜率:
y方向的斜率可以对y偏微分得到。同样的,x方向的斜率也可以对x偏微分得到。
那么我们可以使用这俩个偏微分来求出任何方向的斜率(类似于一个平面的所有向量可以用俩个基向量来表示一样)
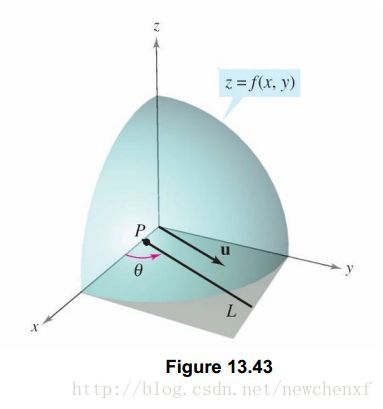
现在我们有这个需求,想求出u方向的斜率怎么办?假设
为一个曲面,
为函数定义域中一个点,单位向量可表示为
,其中
是此向量与x轴正向夹角.单位向量u可以表示对任何方向导数的方向.如下图:
那么我们来考虑如何求出,曲面沿着 方向的斜率,可以类比于前面导数定义,得出如下:
设 为一个二元函数, 为一个单位向量,如果下列的极限值存在
此方向导数记为
则称这个极限值是 沿着 方向的方向导数,那么随着 的不同,我们可以求出任意方向的方向导数。这也表明了方向导数的用处,是为了给我们考虑函数对任意方向的变化率.
在求方向导数的时候,除了用上面的定义法求之外,我们还可以用偏微分来简化我们的计算.
表达式是:
(至于为什么成立,很多资料有,不是这里讨论的重点,其实很好理解, 为0,就是x轴方向,偏导数不就是 嘛)
那么一个平面上无数个方向,函数沿哪个方向变化率最大呢?
目前我不管梯度的事,我先把表达式写出来:
设有这样两个向量:
那么我们可以得到:
(向量的点乘的基本公式。 为向量A与向量I之间的夹角)
那么此时如果 要取得最大值,也就是当 为0度的时候,也就是向量 (这个方向是一直在变,在寻找一个函数变化最快的方向)与向量 (这个方向当点固定下来的时候,它就是固定的)平行的时候,方向导数最大。方向导数最大,也就是单位步伐,函数值朝这个反向变化最快。
好了,现在我们已经找到函数值变化最快的方向了,这个方向就是和 向量相同的方向。那么此时我把 向量命名为梯度(当一个点确定后,梯度方向是确定的),也就是说明了为什么梯度方向是函数变化率最大的方向了!!!(因为本来就是把这个函数变化最大的方向命名为梯度)
1.4 梯度
由上面,总结一下梯度的结论。
梯度是一个向量,表示某一函数在该点处的方向导数沿着该方向(向量)取得最大值。(导数是一个值)
梯度所指的方向就是函数增长最快的方向(负梯度则指向函数下降最快的方向)。
假设二元函数在平面区域D上具有一阶连续偏导数,则对于每一个点 都可定义:
向量 ,该向量就称为函数在点 的梯度。
函数在该点处沿着该方向(此梯度的方向)变化最快,变化率最大(为该梯度的模)。
2. 梯度下降算法
这里就从一个不成熟但能用的例子开始讲。
假设有一堆根据衣着判定男女的数据(training set),( )代鞋码和裤头码的数据, 是鞋码, 是裤头码,y是类标号,y=1表示这条数据是男生,y=-1表示这条数据是女生。我们希望能学习出一个函数 ,使得 能够尽可能准确地描述这些数据,如果能求出这个 ,那么任给一组数据,就能预测出这人是男生还是女生。
那么 长什么样?它的形式需要我们来指定,算法只帮我们训练出其中的参数。为了方便讲解,我设 为下面的形式,也就是一个线性的函数(一般来说,非线性的要比线性的函数的拟合能力要强,这里暂不讨论线性与非线性的问题):
我们希望 能够尽可能准确地描述training set中的样本,但毕竟是猜的,不可能百分百准确,肯定或多或少会有误差。于是对于一个training set,总的误差函数(也称为损失函数)(cost function)可以定义如下:
其中 表示第 i 个样本, 表示第 i 个样本对应的类标号(值为1或-1)。
现在的目标是,找到最优参数 ,使得函数 取得最小值。因为损失最小,代表模拟出的函数 越准确。
回忆上文的结论:
梯度所指的方向就是函数增长最快的方向(负梯度则指向函数下降最快的方向)。
我们先随机取一个参数值 ,然后沿着负梯度的方向调整参数(注意在cost function中,自变量是参数,而不是X,X是已知的样本数据),就可以使我们的损失函数下降得最快,直到无法再降,就是最小值,那时候的参数,就是我们要的参数。
既然是调整参数,那肯定要对他们求导了。
参数 的偏导数:
可能直接看到这个有点懵逼,没事,推导一下。
既然是对 求偏导,那其他值就相当于常数。且假设 是一个常数。
对 求偏导
因为
故而
有严格来说, 是样本数据,根据 i 变化,所以加个上标比较准确。于是公式如下:
好了,偏导都知道怎么求了,如上文所说,我们先随机取一组参数值,接下来让参数沿着负梯度方向走,也就是每个分量沿着对应的梯度反方向的分量走,因此参数在每次迭代的更新规则如下:
是学习率,一般取值为0到1之间,它可以控制参数每步调整的大小,太大的话,有可能走到临近极佳点时,下一步就跨过去了,这样就不收敛了,走得太慢的话,会迭代很多次才收敛。
ps: 网上总是说,大部分人做机器学习,都是调参工程师,说的一个参,就是这个
,哈哈^^
anyway,经过多次迭代之后,我们就得到了的 最优值,也就是在这些个参数下, 对于training set的样本的识别误差最小。这样,我们就训练出了函数 (机器学习领域,可称这个函数为模型),以后随意输入一组样本 , 我们都可以直接输出结果。