- 为什么非得用双目相机才能得到深度?
说到这里,有些读者会问啦:为什么非得用双目相机才能得到深度?我闭上一只眼只用一只眼来观察,也能知道哪个物体离我近哪个离我远啊!是不是说明单目相机也可以获得深度?
在此解答一下:首先,确实人通过一只眼也可以获得一定的深度信息,不过这背后其实有一些容易忽略的因素在起作用:一是因为人本身对所处的世界是非常了解的(先验知识),因而对日常物品的大小是有一个基本预判的(从小到大多年的视觉训练),根据近大远小的常识确实可以推断出图像中什么离我们远什么离我们近;二是人在单眼观察物体的时候其实人眼是晃动的,相当于一个移动的单目相机,这类似于运动恢复结构(Structure from Motion, SfM)的原理,移动的单目相机通过比较多帧差异确实可以得到深度信息。
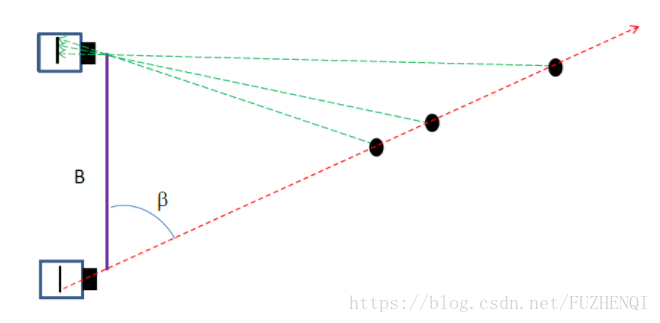
但是实际上,相机毕竟不是人眼,它只会傻傻的按照人的操作拍照,不会学习和思考。下图从物理原理上展示了为什么单目相机不能测量深度值而双目可以的原因。我们看到红色线条上三个不同远近的黑色的点在下方相机上投影在同一个位置,因此单目相机无法分辨成的像到底是远的那个点还是近的那个点,但是它们在上方相机的投影却位于三个不同位置,因此通过两个相机的观察可以确定到底是哪一个点。
- 理想双目相机成像模型
首先我们从理想的情况开始分析:假设左右两个相机位于同一平面(光轴平行),且相机参数(如焦距f)一致。那么深度值的推导原理和公式如下。公式只涉及到初中学的三角形相似知识,不难看懂。
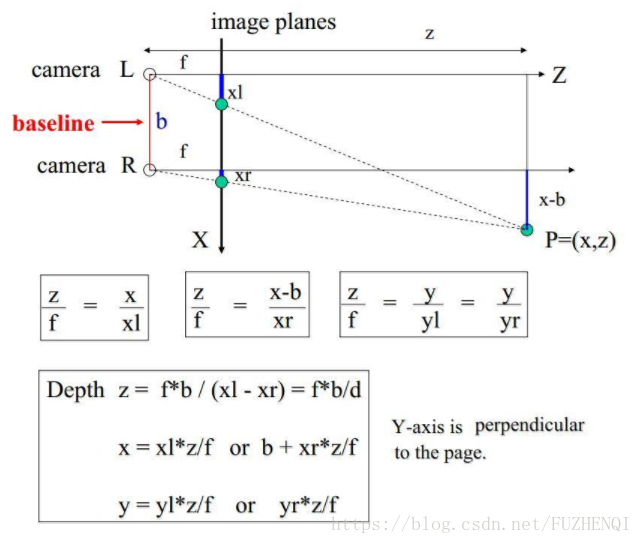
根据上述推导,空间点P离相机的距离(深度)z=f*b/d,可以发现如果要计算深度z,必须要知道:
1、相机焦距f,左右相机基线b。这些参数可以通过先验信息或者相机标定得到。
2、视差d。需要知道左相机的每个像素点(xl, yl)和右相机中对应点(xr, yr)的对应关系。这是双目视觉的核心问题。