1、资源搜索
双目立体视觉匹配算法-----SAD匹配算法、BM算法、SGBM算法、GC算法
半全局块匹配(Semi-Global Block Matching)算法
2、本人总结
在讲具体实现之前,我们还是先想想为什么会此概念。我们要实现的是相机能够可以知道这个场景的深度信息,但是从计算成像角度使用单个相机是不能够得到当前场景的深度。当然,你可以说现在DeepLearning可以实现单张出现深度情况,深度学习确实可以得到从单张图像得到深度,但是它的精度以及复杂场景的适应还需要进一步提高。所以如何解决这个问题呢,这时候我们就想到我们人类自己,我们是怎么知道场景的深度呢。我们使用两只眼睛就可以准确知道当前场景的深度信息,所以很多研究员开始从这个角度作为出发点,来给机器人一双眼睛通过数学计算来得到场景深度。肯定还有人会反驳,我只用一只眼睛也可以知道啊,对确实是这样的,这是我们大脑进行了各种场景的学习,才实现单只眼睛看到场景深度。估计这获取是单张图像得到深度研究的出发点吧。好,既然我们知道双目从哪里借鉴了,那么咱们讲讲机器人在双目深度估计中最重要的匹配算法。下面从一种SAD算法、BM算法、SGBM算法、GC算法展开研究。
2.1 SAD算法
2.1.1 基本概念
该算法是一种图像匹配算法,其主要思想就是差的绝对值之和。并选择其中的最小值。即以左目图像的源匹配点为中心,并且定义一个
矩形大小的窗口D,统计该区域对应的灰度值之和。然后右目逐步计算左右窗口灰度和的差值,最后搜索差值最小区域的中心像素即为匹配点。
2.1.1 基本流程
图像输入:两张矫正之后的图像,对左图,依次扫描,选定一个锚点:
(1)首先构造一个小窗口,类似于卷积核;
(2)用窗口覆盖左边的图像,并选择出窗口覆盖区域内的所有像素点;
(3)用窗口覆盖右边的图像,并选择出覆盖区域的像素点;
(4)利用上述计算公式求出所有像素点灰度差的绝对值之和;
(5)移动右边图像的窗口,重复(3)-(4)的处理,记住这里会设置一个窗口滑动阈值;
(6)找到这个范围内SAD值最小的窗口,即找到了左图锚点的最佳匹配的像素块。
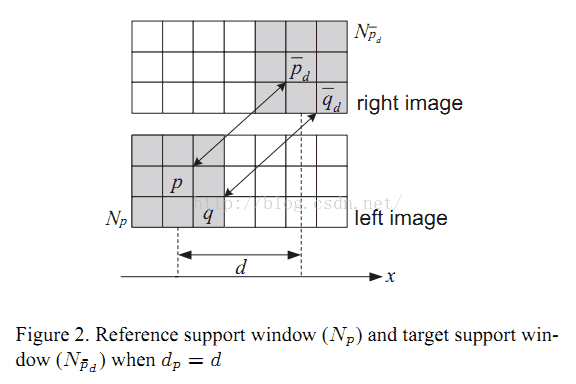
说明:图片中的灰色区域为创建的窗口大小(3*3),距离d会在设定的阈值条件里进行移动;
2.1.2 代码实现
//main.cpp
//
#include"SAD.h"
int main(int argc, char* argv[])
{
namedWindow("Img_L", 0);
namedWindow("Img_R", 0);
namedWindow("Disparity", 0);
Mat Img_L = imread("aloeL.jpg", 0);
Mat Img_R = imread("aloeR.jpg", 0);
Mat Disparity; //视差图
//SAD mySAD;
SAD mySAD(7, 30);
Disparity = mySAD.computerSAD(Img_L, Img_R);
imshow("Img_L", Img_L);
imshow("Img_R", Img_R);
imshow("Disparity", Disparity);
waitKey();
return 0;
}//SAD.h
#include"iostream"
#include"opencv2/opencv.hpp"
#include"iomanip"
using namespace std;
using namespace cv;
class SAD
{
public:
SAD() :winSize(7), DSR(30) {}
SAD(int _winSize, int _DSR) :winSize(_winSize), DSR(_DSR) {}
Mat computerSAD(Mat &L, Mat &R); //计算SAD
private:
int winSize; //卷积核的尺寸
int DSR; //视差搜索范围
};
Mat SAD::computerSAD(Mat &L, Mat &R)
{
int Height = L.rows;
int Width = L.cols;
Mat Kernel_L(Size(winSize, winSize), CV_8U, Scalar::all(0));
Mat Kernel_R(Size(winSize, winSize), CV_8U, Scalar::all(0));
Mat Disparity(Height, Width, CV_8U, Scalar(0)); //视差图
for (int i = 0;i<Width - winSize;i++) //左图从DSR开始遍历
{
for (int j = 0;j<Height - winSize;j++)
{
Kernel_L = L(Rect(i, j, winSize, winSize));
Mat MM(1, DSR, CV_32F, Scalar(0)); //
for (int k = 0;k<DSR;k++)
{
int x = i - k;
if (x >= 0)
{
Kernel_R = R(Rect(x, j, winSize, winSize));
Mat Dif;
absdiff(Kernel_L, Kernel_R, Dif);//
Scalar ADD = sum(Dif);
float a = ADD[0];
MM.at<float>(k) = a;
}
}
Point minLoc;
minMaxLoc(MM, NULL, NULL, &minLoc, NULL);
int loc = minLoc.x;
//int loc=DSR-loc;
Disparity.at<char>(j, i) = loc * 16;
}
}
return Disparity;
}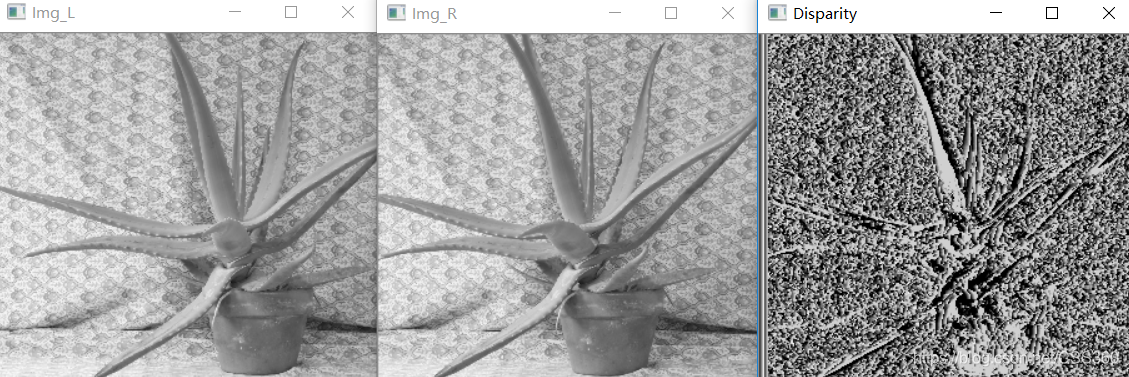
说明:实验使用的数据是OpenCV提供的
2.2 BM算法
2.2.1 简单说明
其实BM算法核心就是上面提到的SAD方法,所以这里就不就行特别说明了。但是大家看到效果后肯定会有疑问,为什么相同但实现的效果和速度上有很大差别呢!因为OpenCV在实现的时候,进行了滤波处理(使用sobel处理,关于这块讲解可以参考链接)和加速优化计算。
2.2.2 代码实现
//main.cpp
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/core/utility.hpp"
#include <stdio.h>
using namespace cv;
static void print_help()
{
printf("\nDemo stereo matching converting L and R images into disparity and point clouds\n");
printf("\nUsage: stereo_match <left_image> <right_image> [--algorithm=bm|sgbm|hh|sgbm3way] [--blocksize=<block_size>]\n"
"[--max-disparity=<max_disparity>] [--scale=scale_factor>] [-i=<intrinsic_filename>] [-e=<extrinsic_filename>]\n"
"[--no-display] [-o=<disparity_image>] [-p=<point_cloud_file>]\n");
}
static void saveXYZ(const char* filename, const Mat& mat)
{
const double max_z = 1.0e4;
FILE* fp = fopen(filename, "wt");
for(int y = 0; y < mat.rows; y++)
{
for(int x = 0; x < mat.cols; x++)
{
Vec3f point = mat.at<Vec3f>(y, x);
if(fabs(point[2] - max_z) < FLT_EPSILON || fabs(point[2]) > max_z) continue;
fprintf(fp, "%f %f %f\n", point[0], point[1], point[2]);
}
}
fclose(fp);
}
int main(int argc, char** argv)
{
std::string img1_filename = "";
std::string img2_filename = "";
std::string intrinsic_filename = "";
std::string extrinsic_filename = "";
std::string disparity_filename = "./disparity.jpg";
std::string point_cloud_filename = "";
enum { STEREO_BM=0, STEREO_SGBM=1, STEREO_HH=2, STEREO_VAR=3, STEREO_3WAY=4 };
int alg = STEREO_SGBM;
int SADWindowSize, numberOfDisparities;
bool no_display;
float scale;
Ptr<StereoBM> bm = StereoBM::create(16,9);
Ptr<StereoSGBM> sgbm = StereoSGBM::create(0,16,3);
cv::CommandLineParser parser(argc, argv,
"{@arg1||}{@arg2||}{help h||}{algorithm||}{max-disparity|0|}{blocksize|0|}{no-display||}{scale|1|}{i||}{e||}{o||}{p||}");
/*if(parser.has("help"))
{
print_help();
return 0;
}*/
//img1_filename = parser.get<std::string>(0);
//img2_filename = parser.get<std::string>(1);
img1_filename = "aloeL.jpg";
img2_filename = "aloeR.jpg";
if (parser.has("algorithm"))
{
std::string _alg = parser.get<std::string>("algorithm");
alg = _alg == "bm" ? STEREO_BM :
_alg == "sgbm" ? STEREO_SGBM :
_alg == "hh" ? STEREO_HH :
_alg == "var" ? STEREO_VAR :
_alg == "sgbm3way" ? STEREO_3WAY : -1;
}
numberOfDisparities = 256;//即最大视差值与最小视差值之差, 窗口大小必须是 16 的整数倍
SADWindowSize = 7;
scale = 1.0;//图像尺度
no_display = false;//不显示
if( parser.has("i") )
intrinsic_filename = parser.get<std::string>("i");
if( parser.has("e") )
extrinsic_filename = parser.get<std::string>("e");
if( parser.has("o") )
disparity_filename = parser.get<std::string>("o");
if( parser.has("p") )
point_cloud_filename = parser.get<std::string>("p");
if (!parser.check())
{
parser.printErrors();
return 1;
}
if( alg < 0 )
{
printf("Command-line parameter error: Unknown stereo algorithm\n\n");
print_help();
return -1;
}
if ( numberOfDisparities < 1 || numberOfDisparities % 16 != 0 )
{
printf("Command-line parameter error: The max disparity (--maxdisparity=<...>) must be a positive integer divisible by 16\n");
print_help();
return -1;
}
if (scale < 0)
{
printf("Command-line parameter error: The scale factor (--scale=<...>) must be a positive floating-point number\n");
return -1;
}
if (SADWindowSize < 1 || SADWindowSize % 2 != 1)
{
printf("Command-line parameter error: The block size (--blocksize=<...>) must be a positive odd number\n");
return -1;
}
if( img1_filename.empty() || img2_filename.empty() )
{
printf("Command-line parameter error: both left and right images must be specified\n");
return -1;
}
if( (!intrinsic_filename.empty()) ^ (!extrinsic_filename.empty()) )
{
printf("Command-line parameter error: either both intrinsic and extrinsic parameters must be specified, or none of them (when the stereo pair is already rectified)\n");
return -1;
}
if( extrinsic_filename.empty() && !point_cloud_filename.empty() )
{
printf("Command-line parameter error: extrinsic and intrinsic parameters must be specified to compute the point cloud\n");
return -1;
}
int color_mode = alg == STEREO_BM ? 0 : -1;
Mat img1 = imread(img1_filename, color_mode);
Mat img2 = imread(img2_filename, color_mode);
if (img1.empty())
{
printf("Command-line parameter error: could not load the first input image file\n");
return -1;
}
if (img2.empty())
{
printf("Command-line parameter error: could not load the second input image file\n");
return -1;
}
if (scale != 1.f)
{
Mat temp1, temp2;
int method = scale < 1 ? INTER_AREA : INTER_CUBIC;
resize(img1, temp1, Size(), scale, scale, method);
img1 = temp1;
resize(img2, temp2, Size(), scale, scale, method);
img2 = temp2;
}
Size img_size = img1.size();
Rect roi1, roi2;
Mat Q;
if( !intrinsic_filename.empty() )
{
// reading intrinsic parameters
FileStorage fs(intrinsic_filename, FileStorage::READ);
if(!fs.isOpened())
{
printf("Failed to open file %s\n", intrinsic_filename.c_str());
return -1;
}
Mat M1, D1, M2, D2;
fs["M1"] >> M1;
fs["D1"] >> D1;
fs["M2"] >> M2;
fs["D2"] >> D2;
M1 *= scale;
M2 *= scale;
fs.open(extrinsic_filename, FileStorage::READ);
if(!fs.isOpened())
{
printf("Failed to open file %s\n", extrinsic_filename.c_str());
return -1;
}
Mat R, T, R1, P1, R2, P2;
fs["R"] >> R;
fs["T"] >> T;
stereoRectify( M1, D1, M2, D2, img_size, R, T, R1, R2, P1, P2, Q, CALIB_ZERO_DISPARITY, -1, img_size, &roi1, &roi2 );
Mat map11, map12, map21, map22;
initUndistortRectifyMap(M1, D1, R1, P1, img_size, CV_16SC2, map11, map12);
initUndistortRectifyMap(M2, D2, R2, P2, img_size, CV_16SC2, map21, map22);
Mat img1r, img2r;
remap(img1, img1r, map11, map12, INTER_LINEAR);
remap(img2, img2r, map21, map22, INTER_LINEAR);
img1 = img1r;
img2 = img2r;
}
numberOfDisparities = numberOfDisparities > 0 ? numberOfDisparities : ((img_size.width/8) + 15) & -16;
bm->setROI1(roi1);
bm->setROI2(roi2);
bm->setPreFilterCap(31);
bm->setBlockSize(SADWindowSize > 0 ? SADWindowSize : 9);
bm->setMinDisparity(0);
bm->setNumDisparities(numberOfDisparities);
bm->setTextureThreshold(10);
bm->setUniquenessRatio(15);
bm->setSpeckleWindowSize(100);
bm->setSpeckleRange(32);
bm->setDisp12MaxDiff(1);
sgbm->setPreFilterCap(63);
int sgbmWinSize = SADWindowSize > 0 ? SADWindowSize : 3;
sgbm->setBlockSize(sgbmWinSize);
int cn = img1.channels();
sgbm->setP1(8*cn*sgbmWinSize*sgbmWinSize);
sgbm->setP2(32*cn*sgbmWinSize*sgbmWinSize);
sgbm->setMinDisparity(0);
sgbm->setNumDisparities(numberOfDisparities);
sgbm->setUniquenessRatio(10);
sgbm->setSpeckleWindowSize(100);
sgbm->setSpeckleRange(32);
sgbm->setDisp12MaxDiff(1);
if(alg==STEREO_HH)
sgbm->setMode(StereoSGBM::MODE_HH);
else if(alg==STEREO_SGBM)
sgbm->setMode(StereoSGBM::MODE_SGBM);
else if(alg==STEREO_3WAY)
sgbm->setMode(StereoSGBM::MODE_SGBM_3WAY);
Mat disp, disp8;
//Mat img1p, img2p, dispp;
//copyMakeBorder(img1, img1p, 0, 0, numberOfDisparities, 0, IPL_BORDER_REPLICATE);
//copyMakeBorder(img2, img2p, 0, 0, numberOfDisparities, 0, IPL_BORDER_REPLICATE);
int64 t = getTickCount();
if( alg == STEREO_BM )
bm->compute(img1, img2, disp);
else if( alg == STEREO_SGBM || alg == STEREO_HH || alg == STEREO_3WAY )
sgbm->compute(img1, img2, disp);
t = getTickCount() - t;
printf("Time elapsed: %fms\n", t*1000/getTickFrequency());
//disp = dispp.colRange(numberOfDisparities, img1p.cols);
if( alg != STEREO_VAR )
disp.convertTo(disp8, CV_8U, 255/(numberOfDisparities*16.));
else
disp.convertTo(disp8, CV_8U);
if( !no_display )
{
namedWindow("left", 1);
imshow("left", img1);
namedWindow("right", 1);
imshow("right", img2);
namedWindow("disparity", 0);
imshow("disparity", disp8);
printf("press any key to continue...");
fflush(stdout);
waitKey();
printf("\n");
}
if(!disparity_filename.empty())
imwrite(disparity_filename, disp8);
if(!point_cloud_filename.empty())
{
printf("storing the point cloud...");
fflush(stdout);
Mat xyz;
reprojectImageTo3D(disp, xyz, Q, true);
saveXYZ(point_cloud_filename.c_str(), xyz);
printf("\n");
}
return 0;
}
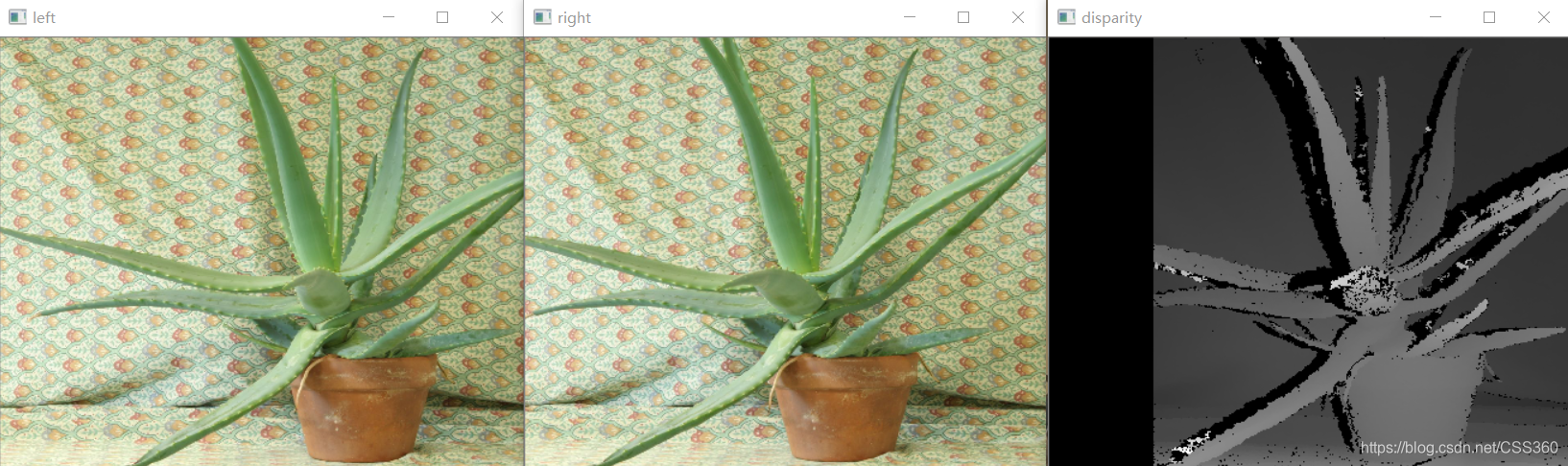
说明:此代码为OpenCV官方提供
2.3 SGBM算法
这里讲解的SGBM主要是讲OpenCV中如何实现的,大家如果想了解作者提出的SGM,请看论文《《Stereo Processing by Semi-Global Matching and Mutual Information》》,当然后面有时间的话,我也会对论文进行说明。
2.3.1 基本概念
该算法是一个半全局匹配算法,其实现效果明显优于局部匹配算法,但是同时会增加算法的复杂度。
2.3.2 实现流程
该算法主要含有4部分组成:图像预处理、代价计算、动态规划、后处理。
2.3.2.1 图像预处理
(1)Sobel算子图像计算
使用Sobel对图像进行处理,来得到梯度信息:
(2)映射得到新图像
将经过步骤(1)处理后的图像,映射为一个新图像;
其中preFilterCap为一个常数,在程序实现时可以自行进行设定;将(为图像的梯度信息)进行代价处理。
2.3.2.2 代价计算
该部分由两个代价组成:梯度图像、原图像。两幅图像分别使用基于采样的方法,进行SAD代价计算。关于为什么采用基于采样的方法,可以参考《DepthDiscontinuities by Pixel-to-Pixel Stereo》
2.3.2.3 动态规划
动态规划公式:
默认4条路径,其中动态规划很重要两个参数和
其计算公式:
;
;
cn是图像的通道数, SADWindowSize是SAD窗口大小,数值为奇数。从公式可以看出,当SAD窗口确定时,SGBM规划参数和
也就确定。
2.3.2.3 后处理
后处理主要由4部分组成:唯一性检测、亚像素插值、左右一致性检测、连通区域检测;
(1)唯一性检测
视差窗口范围内最低代价是次代价的倍时,最低代价对应的视差值才是该像素点的视差,否则该像素点的视差为0。其中
为常数
(2)亚像素插值
(3)左右一致性检测
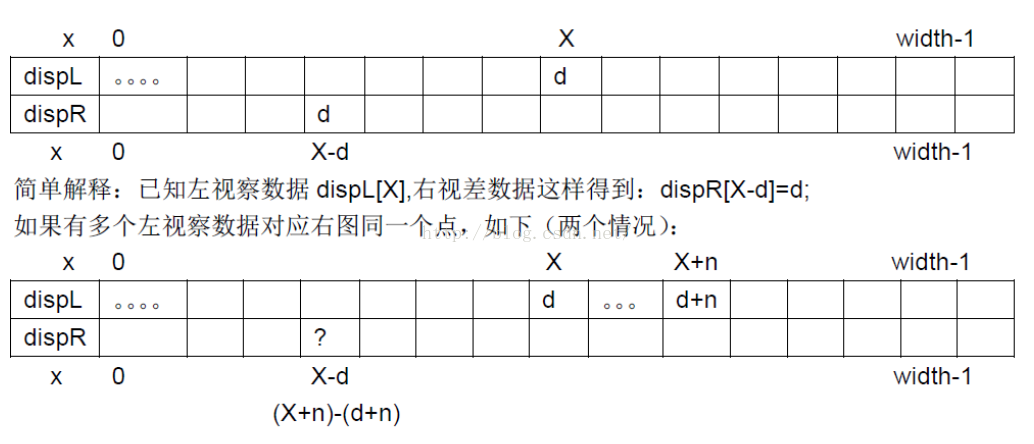
遇见上图情况dispR[X-d]是d还是d+n?
实际上,dispR[X-d]确定方式是比较dispL中X和X+n出的最小代价,选代价最小对应的视差最为最优视差。
通过下面的方式来确定左视图中像素的视差是否为有效:
&&
if( 0 <= _x && _x < width && disp2Buf[_x] >= minD && std::abs(disp2Buf[_x] - _d) > disp12MaxDiff &&
0 <= x_ && x_ < width && disp2Buf[x_] >= minD && std::abs(disp2Buf[x_] - d_) > disp12MaxDiff )
disp_row[x] = (short)INVALID_DISP_SCALED;(注:根据OpenCV的源码可以看到应该是大于号)
满足上述条件,则就认为是误匹配点。
满足上述条件情况下,其实检测的大都是遮挡点。比如上图中,左视差图X和X+n按照规则都会映射到右视差图的X-d处,若再左视差图中,X位置是遮挡点,那么左差图X位置最小代价一定会比X+n处大(因为X处找不到匹配,所谓最小代价也是很大的), 这样的话dispR[X-d] = d + n。
先看左边判别式:
检测到X处(遮挡误匹配点),发现dispR[x-d]=d+n,并不是d。因此就会符合条件1中
实际上这个条件是想解决一个这样的事情:当左图多个点同时匹配到右图中同一个点时,如何选择正确的匹配关系,毕竟左右图像素应该是一对一的。
再看右边判别式:
该判别式主要用来检测右视差图在X-d处的视差值是否连续,如果左视差图X处是遮挡误匹配点,那么dispL[X]中的d是不准确的,因此dispR[X-d] = d也是不准确的,即不能保证dispR[X-d-1]处视差值和d很相近,所以右视图在X-d处的视差值不连续。
(4)连通区域检测
对左右一致性检测后的视差再一次检测误匹配点,根据当前处理满足视差点连通条件的像素点个数来判断当前处理的视差点是否为误匹配点,个数小于一个阈值就认为是误匹配点。
循环遍历每个像素点,对每个视差像素点d,检测器周围(上下左右)的视差是否满足这样的条件(视差连通条件):
1. 首先是LRcheck后,视差有效的点;
2. 和中心视差值(变化)绝对值不超过speckleRange。注:speckleRange是一个常数参数,可以自己设定
具体实现
1. 当周围点至少有一个视差点满足视差连通条件后,在分别以它们为起点(称为传播),检测周围的视差点是否满足视差连通条件。(注:前向传播的点不算,比如像素2是通过像素1传播过来的,那么像素2肯定是像素1周围的点。再以像素2为起点检测周围的视差点是否满足连通条件时,像素1不算满足视差连通条件)
2. 每检测到一个新的连通点,其对应点的标志位置1,计数器加1,知道每个新的连通点周围都不满足连通条件,停止计数。
3. 判断计数值(当前处理的视差点的连通区域像素点个数)> speckleWindowSize,若大于,视差值认为有效,反之当前视差值为噪声点。