一、SAD算法
1.算法原理
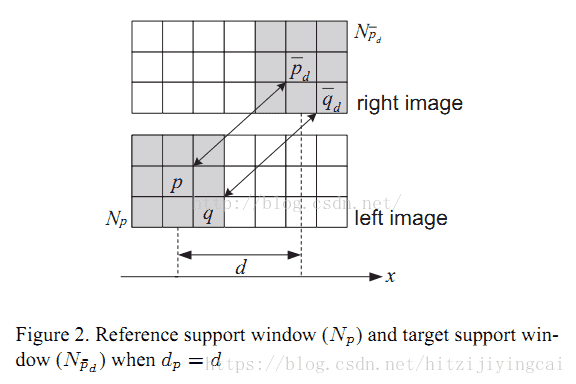
SAD(Sum of absolute differences)是一种图像匹配算法。基本思想:差的绝对值之和。此算法常用于图像块匹配,将每个像素对应数值之差的绝对值求和,据此评估两个图像块的相似度。该算法快速、但并不精确,通常用于多级处理的初步筛选。
2.基本流程
输入:两幅图像,一幅Left-Image,一幅Right-Image
对左图,依次扫描,选定一个锚点:
(1)构造一个小窗口,类似于卷积核;
(2)用窗口覆盖左边的图像,选择出窗口覆盖区域内的所有像素点;
(3)同样用窗口覆盖右边的图像并选择出覆盖区域的像素点;
(4)左边覆盖区域减去右边覆盖区域,并求出所有像素点灰度差的绝对值之和;
(5)移动右边图像的窗口,重复(3)-(4)的处理(这里有个搜索范围,超过这个范围跳出);
(6)找到这个范围内SAD值最小的窗口,即找到了左图锚点的最佳匹配的像素块。
3、代码
#include<iostream>
#include<opencv2/opencv.hpp>
using namespace std;
using namespace cv;
class SAD
{
private:
int winSize;//卷积核尺寸
int DSR;//视差搜索范围
public:
SAD() :winSize(7), DSR(30){}
SAD(int _winSize, int _DSR) :winSize(_winSize), DSR(_DSR){}
Mat computerSAD(Mat&L, Mat&R);//计算SAD
};
Mat SAD::computerSAD(Mat&L, Mat&R)
{
int Height = L.rows;
int Width = L.cols;
Mat Kernel_L(Size(winSize, winSize), CV_8U, Scalar::all(0));
//CV_8U:0~255的值,大多数图像/视频的格式,该段设置全0矩阵
Mat Kernel_R(Size(winSize, winSize), CV_8U, Scalar::all(0));
Mat Disparity(Height, Width, CV_8U, Scalar(0));
for (int i = 0; i < Width - winSize; ++i){
for (int j = 0; j < Height - winSize; ++j){
Kernel_L = L(Rect(i, j, winSize, winSize));//L为做图像,Kernel为这个范围内的左图
Mat MM(1, DSR, CV_32F, Scalar(0));//定义匹配范围
for (int k = 0; k < DSR; ++k){
int x = i - k;
if (x >= 0){
Kernel_R = R(Rect(x, j, winSize, winSize));
Mat Dif;
absdiff(Kernel_L, Kernel_R, Dif);
Scalar ADD = sum(Dif);
float a = ADD[0];
MM.at<float>(k) = a;
}
Point minLoc;
minMaxLoc(MM, NULL, NULL, &minLoc, NULL);
int loc = minLoc.x;
Disparity.at<char>(j, i) = loc * 16;
}
double rate = double(i) / (Width);
cout << "已完成" << setprecision(2) << rate * 100 << "%" << endl;
}
}
return Disparity;
}
int main()
{
Mat left = imread("Left.png");
Mat right = imread("Right.png");
//-------图像显示-----------
namedWindow("leftimag");
imshow("leftimag", left);
namedWindow("rightimag");
imshow("rightimag", right);
//--------由SAD求取视差图-----
Mat Disparity;
SAD mySAD(7, 30);
Disparity = mySAD.computerSAD(left, right);
//-------结果显示------
namedWindow("Disparity");
imshow("Disparity", Disparity);
//-------收尾------
waitKey(0);
return 0;
}4、结果
左图:

右图:
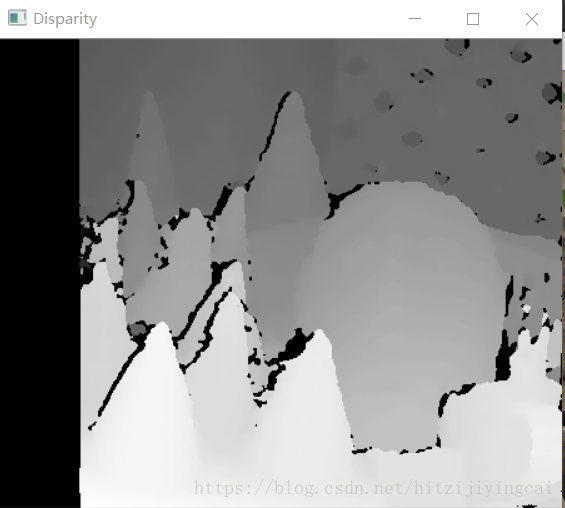
视差图结果:

二、SGBM算法
1、SGBM算法作为一种全局匹配算法,立体匹配的效果明显好于局部匹配算法,但是同时复杂度上也要远远大于局部匹配算法。算法主要是参考Stereo Processing by Semiglobal Matching and Mutual Information。
opencv中实现的SGBM算法计算匹配代价没有按照原始论文的互信息作为代价,而是按照块匹配的代价。
对该算法的具体讲解可以参考:https://www.cnblogs.com/hrlnw/p/4746170.html。
参考:http://www.opencv.org.cn/forum.php?mod=viewthread&tid=23854。
2、代码
#include<iostream>
#include<opencv2/opencv.hpp>
using namespace std;
using namespace cv;
class SGBM
{
private:
enum mode_view { LEFT, RIGHT };
mode_view view; //输出左视差图or右视差图
public:
SGBM() {};
SGBM(mode_view _mode_view) :view(_mode_view) {};
~SGBM() {};
Mat computersgbm(Mat &L, Mat &R); //计算SGBM
};
Mat SGBM::computersgbm(Mat &L, Mat &R)
/*SGBM_matching SGBM算法
*@param Mat &left_image :左图像
*@param Mat &right_image:右图像
*/
{
Mat disp;
int numberOfDisparities = ((L.size().width / 8) + 15)&-16;
Ptr<StereoSGBM> sgbm = StereoSGBM::create(0, 16, 3);
sgbm->setPreFilterCap(32);
int SADWindowSize = 5;
int sgbmWinSize = SADWindowSize > 0 ? SADWindowSize : 3;
sgbm->setBlockSize(sgbmWinSize);
int cn = L.channels();
sgbm->setP1(8 * cn*sgbmWinSize*sgbmWinSize);
sgbm->setP2(32 * cn*sgbmWinSize*sgbmWinSize);
sgbm->setMinDisparity(0);
sgbm->setNumDisparities(numberOfDisparities);
sgbm->setUniquenessRatio(10);
sgbm->setSpeckleWindowSize(100);
sgbm->setSpeckleRange(32);
sgbm->setDisp12MaxDiff(1);
Mat left_gray, right_gray;
cvtColor(L, left_gray, CV_BGR2GRAY);
cvtColor(R, right_gray, CV_BGR2GRAY);
view = LEFT;
if (view == LEFT) //计算左视差图
{
sgbm->compute(left_gray, right_gray, disp);
disp.convertTo(disp, CV_32F, 1.0 / 16); //除以16得到真实视差值
Mat disp8U = Mat(disp.rows, disp.cols, CV_8UC1);
normalize(disp, disp8U, 0, 255, NORM_MINMAX, CV_8UC1);
imwrite("results/SGBM.jpg", disp8U);
return disp8U;
}
else if (view == RIGHT) //计算右视差图
{
sgbm->setMinDisparity(-numberOfDisparities);
sgbm->setNumDisparities(numberOfDisparities);
sgbm->compute(left_gray, right_gray, disp);
disp.convertTo(disp, CV_32F, 1.0 / 16); //除以16得到真实视差值
Mat disp8U = Mat(disp.rows, disp.cols, CV_8UC1);
normalize(disp, disp8U, 0, 255, NORM_MINMAX, CV_8UC1);
imwrite("results/SGBM.jpg", disp8U);
return disp8U;
}
else
{
return Mat();
}
}
int main()
{
Mat left = imread("Left.png");
Mat right = imread("Right.png");
//-------图像显示-----------
namedWindow("leftimag");
imshow("leftimag", left);
namedWindow("rightimag");
imshow("rightimag", right);
//--------由SAD求取视差图-----
Mat Disparity;
SGBM mySGBM;
Disparity = mySGBM.computersgbm(left, right);
//-------结果显示------
namedWindow("Disparity");
imshow("Disparity", Disparity);
//-------收尾------
waitKey(0);
return 0;
}3、结果
所用的左右图同上,所得结果为:
NB:对于使用的其他算法本次没有实验,故没有介绍,可以参考:https://blog.csdn.net/liulina603/article/details/53302168