边缘检测
1、Sobel
2、Laplace
3、Roberts
4、
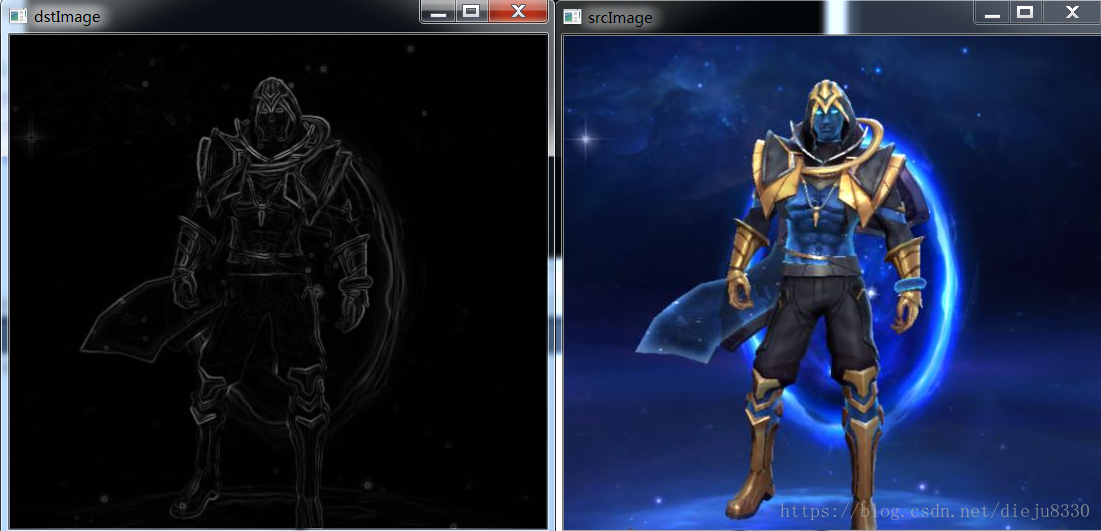
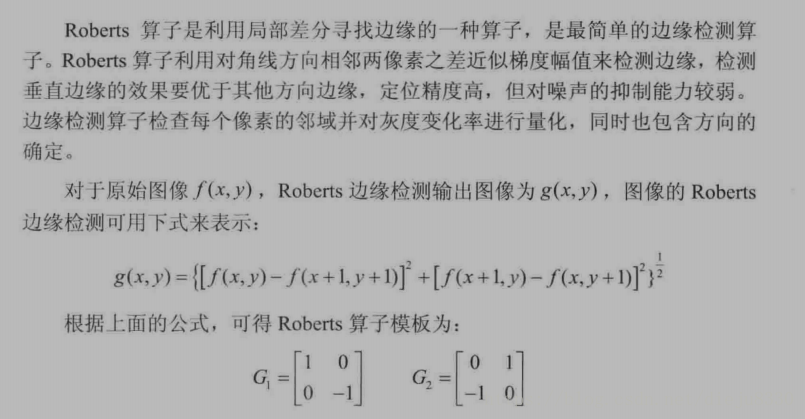
Roberts
就是以对角线作为差分的方向来检测
实现代码:
#include<opencv2/core/core.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<iostream>
using namespace std;
using namespace cv;
//Roberts算子实现
Mat roberts(Mat srcImage)
{
Mat dstImage = srcImage.clone();
int nRows = dstImage.rows;
int nCols = dstImage.cols;
for (int i = 0; i < nRows - 1; i++){
for (int j = 0; j < nCols - 1; j++){
//根据公式计算
int t1 = (srcImage.at<uchar>(i, j) -
srcImage.at<uchar>(i + 1, j + 1))*
(srcImage.at<uchar>(i, j) -
srcImage.at<uchar>(i + 1, j + 1));
int t2 = (srcImage.at<uchar>(i+1, j) -
srcImage.at<uchar>(i , j + 1))*
(srcImage.at<uchar>(i+1, j) -
srcImage.at<uchar>(i , j + 1));
//计算g(x,y)
dstImage.at<uchar>(i, j) = (uchar)sqrt(t1 + t2);
}
}
return dstImage;
}
void main()
{
Mat srcImage = imread("F:\\opencv_re_learn\\2.jpg");
if (!srcImage.data){
cout << "falied to read" << endl;
system("pause");
return;
}
Mat srcGray;
cvtColor(srcImage, srcGray, CV_BGR2GRAY);
//高斯滤波
GaussianBlur(srcGray, srcGray, Size(3, 3),
0, 0, BORDER_DEFAULT);
Mat dstImage = roberts(srcGray);
imshow("srcImage", srcImage);
imshow("dstImage", dstImage);
waitKey(0);
}实现效果: