转载:https://blog.csdn.net/tigerda/article/details/61192943
一、边缘的重要性
边缘在图像处理中的重要性不言而喻。当前AI最高端技术莫过于深度学习,而图像方面的深度学习建模所需要的特征,很多是从边缘为起点,不断向上构成更高层次的特征描述。我们来看下例子,此例摘自zouxy09关于深度学习的一篇文章( Deep Learning(深度学习)学习笔记整理系列):
1995 年前后,Bruno Olshausen和 David Field 两位学者任职 Cornell University,他们试图同时用生理学和计算机的手段,双管齐下,研究视觉问题。
他们收集了很多黑白风景照片,从这些照片中,提取出400个小碎片,每个照片碎片的尺寸均为 16x16 像素,不妨把这400个碎片标记为 S[i], i = 0,.. 399。接下来,再从这些黑白风景照片中,随机提取另一个碎片,尺寸也是 16x16 像素,不妨把这个碎片标记为 T。
他们提出的问题是,如何从这400个碎片中,选取一组碎片,S[k], 通过叠加的办法,合成出一个新的碎片,而这个新的碎片,应当与随机选择的目标碎片 T,尽可能相似,同时,S[k] 的数量尽可能少。用数学的语言来描述,就是:
Sum_k (a[k] * S[k]) --> T, 其中 a[k] 是在叠加碎片 S[k] 时的权重系数。
为解决这个问题,Bruno Olshausen和 David Field 发明了一个算法,稀疏编码(Sparse Coding)。
稀疏编码是一个重复迭代的过程,每次迭代分两步:
1)选择一组 S[k],然后调整 a[k],使得Sum_k (a[k] * S[k]) 最接近 T。
2)固定住 a[k],在 400 个碎片中,选择其它更合适的碎片S’[k],替代原先的 S[k],使得Sum_k (a[k] * S’[k]) 最接近 T。
经过几次迭代后,最佳的 S[k] 组合,被遴选出来了。令人惊奇的是,被选中的 S[k],基本上都是照片上不同物体的边缘线,这些线段形状相似,区别在于方向。
Bruno Olshausen和 David Field 的算法结果,与 David Hubel 和Torsten Wiesel 的生理发现,不谋而合!
也就是说,复杂图形,往往由一些基本结构组成。比如下图:一个图可以通过用64种正交的edges(可以理解成正交的基本结构)来线性表示。比如样例的x可以用1-64个edges中的三个按照0.8,0.3,0.5的权重调和而成。而其他基本edge没有贡献,因此均为0 。

图 1
上面的例子只是说明了边缘特征的重要性(是不是扯远了 )。接着扯。。。
)。接着扯。。。
二、边缘定义及类型
定义:边缘是不同区域的分界线,是周围(局部)像素有显著变化的像素的集合,有幅值与方向两个属性。这个不是绝对的定义,主要记住边缘是局部特征以及周围像素显著变化产生边缘。
tips:轮廓和边缘的关系,一般认为轮廓是对物体的完整边界的描述,边缘点一个个连接起来构成轮廓。边缘可以是一段边缘,而轮廓一般是完整的。人眼视觉特性,看物体时一般是先获取物体的轮廓信息,再获取物体中的细节信息,比如看到几个人站在那,我们一眼看过去马上能知道的是每个人的高矮胖瘦,然后才获取脸和衣着等信息。
类型:简单分为4中类型,阶跃型、屋脊型、斜坡型、脉冲型,其中阶跃型和斜坡型是类似的,只是变化的快慢不同,同样,屋脊型和脉冲型也是如此。见图2,(a)和(b)可认为是阶跃或斜坡型,(c)脉冲型,(d)屋脊型,阶跃与屋脊的不同在于阶跃上升或下降到某个值后持续下去,而屋脊则是先上升后下降。

图 2 边缘类型
三、图像边缘描述
我们更多关注的是阶跃和屋脊型边缘,边缘用微分算子来刻画,见图3
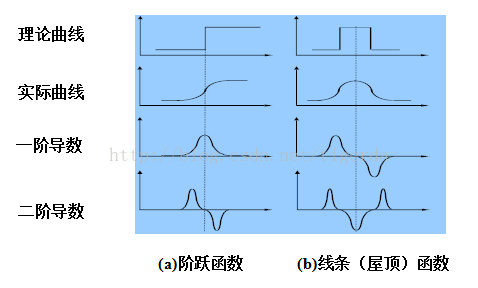
图 3
在数学中,函数的变化率由导数来刻画,图像我们看成二维函数,其上面的像素值变化,当然也可以用导数来刻画,当然图像是离散的,那我们换成像素的差分来实现。对于阶跃型边缘,图3中显示其一阶导数具有极大值,极大值点对应二阶导数的过零点,也就是,准确的边缘的位置是对应于一阶导数的极大值点,或者二阶导数的过零点(注意不仅仅是二阶导数为0值的位置,二值正负值过渡的零点)。故边缘检测算子的类型当然就存在一阶和二阶微分算子。
四、边缘检测算子类别
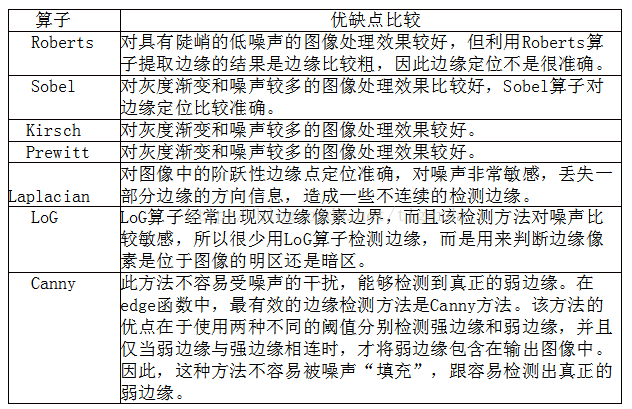
常见边缘检测算子:Roberts 、Sobel 、Prewitt、Laplacian、Log/Marr、Canny、Kirsch、Nevitia
一阶微分算子:Roberts 、Sobel 、Prewitt
Robert算子是第一个边缘检测算子,提出者Lawrence Roberts in 1963。
Sobel边缘算子,当年作者并没有公开发表过论文,仅仅是在一次博士生课题讨论会(1968)上提出("A 3x3 Isotropic Gradient Operator for Image Processing"),后在1973年出版的一本专著("Pattern Classification and Scene Analysis")的脚注里作为注释出现和公开的。提出者Irwin Sobel。
Prewitt算子来自J.M.S. Prewitt "Object Enhancement and Extraction" in "Picture processing and Psychopictorics", Academic Press,1970。
我们看这三种边缘检测算子模板及写成差分的形式
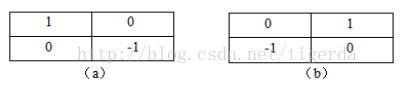
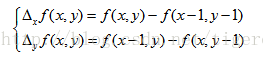
Roberts算子
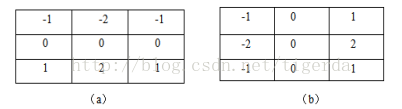

Sobel算子

Prewitt算子
图 4 一阶微分算子
如何计算边缘幅值与方向?以Sobel算子为例。3*3 Sobel两个方向的算子在图像上滑动,模板与其覆盖的图像3*3区域9个像素进行卷积,求和后得到此方向的边缘检测幅值。
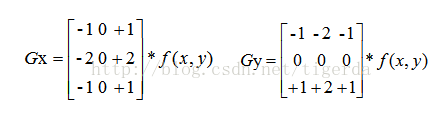
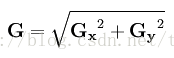

f(x,y)为图像,Gx和Gy分别是水平和竖直方向算子的卷积结果,G则是最终得到的边缘幅值,θ值则是边缘方向。当然G的计算有时简化为
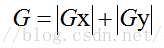
或者
求幅值时是有多种选择的,一般根据具体应用选择用水平还是竖直或是两个方向同时检测。
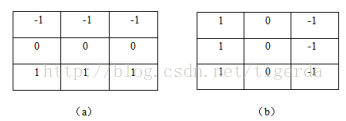
另外,需要说明的是,Sobel算子还有一种变种,是各向同性Sobel算子,其模板为
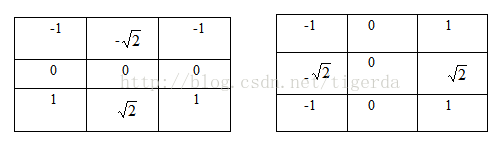
图 5 各向同性Sobel算子
Sobel各向同性算子的权值比普通Sobel算子的权值更准确。为什么?模板的权值是离中心位置越远则权值(看绝对值)影响越小,如上图,把模板看成是9个小正方形,小正方形边长为1,则虚线三角形的斜边长为
二阶微分算子:Laplacian、Log/Marr
拉普拉斯算子来自拉普拉斯变换,而Log算子又称Marr算子,由David Courtnay Marr和Ellen Hildreth(1980)共同提出,计算神经学创始人Marr在1980年正式发表论文时,因换白血病早逝,后面设立Marr奖以此纪念其贡献,现在每两年的ICCV(与ECCV,CVPR并称计算机视觉三大顶级会议)会评出一个Marr奖。这两种算子模板如下:
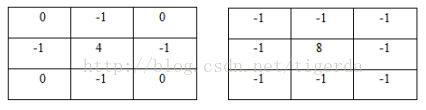
Laplacian算子(两种模板)
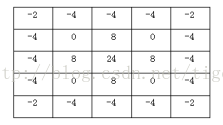
Log算子
图 6 二阶微分算子
拉普拉斯算子数学公式是
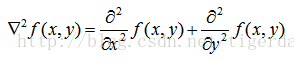
写成差分形式为

Log边缘检测则是先进行高斯滤波再进行拉普拉斯算子检测,然后找过零点来确定边缘位置,很多时候我们只是知道Log 5*5模板如上图所示,但是具体是怎么得到的?下面进行推导。
二维高斯公式是
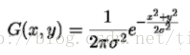
按拉普拉斯算子公式求x,y方向的二阶偏导后为
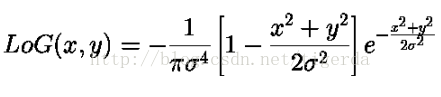
这里x,y不能看成模板位置,应看成是模板其他位置到中心位置的距离。那么写成

这里x0,y0就是模板中心位置,x,y是模板其他位置,对于5*5模板,则x0=2,y0 = 2,那对于模板中(0,0)位置的权值,即把x= 0,y= 0,x0= 2,y0 = 2带入上式,另
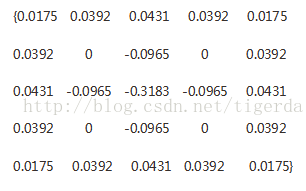
通过取整变符号,且模板总和为0,得到图6所示的模板。
另外,这里模板大小是如何取的?通常高斯分布中,在(-3 )。
)。
非微分边缘检测算子:Canny
Canny边缘检测大家应该很熟悉,这里列出步骤,并给出一个详细介绍的链接Canny算子。
1. 彩色图像转换为灰度图像
2. 对图像进行高斯模糊
3. 计算图像梯度,根据梯度计算图像边缘幅值与角度(这里其实用到了微分边缘检测算子来计算梯度幅值方向)
4. 非最大信号压制处理(边缘细化)
5. 双阈值边缘连接处理
6. 二值化图像输出结果
方向算子Kirsch(8个3*3模板),Nevitia (12个5*5模板)
这两个算子是利用多个方向的子模板进行分别计算,最后取幅值最大的那个为最终边缘幅值,方向即最大幅值对应的那个方向
五、各边缘检测算子对比

opencv直接调用的Roberts和Prewitt边缘检测


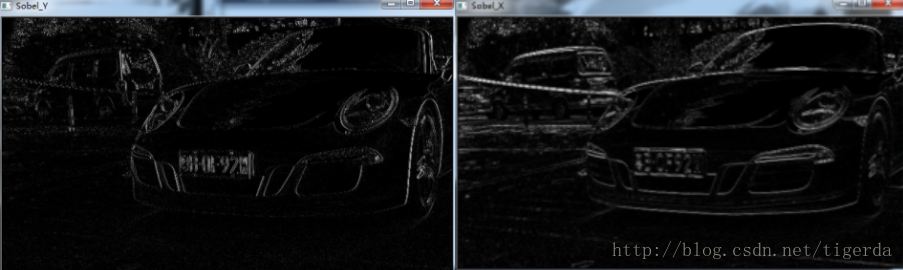
自己写的Sobel算子,分别进行竖直和水平边缘检测,最后取竖直和水平边缘最大幅值

opencv直接调用的Laplacian和Canny边缘检测


Log 5*5模板,可以看出Log检测出的边缘很多并不是真正的边缘位置,下图没有经过过零点排除一些边缘点,噪声被充分检测出来。

当然,有很多关于以上边缘检测算子的理论解释及特性等可以参考以下几篇博文:
1、http://blog.csdn.net/xiaojiegege123456/article/details/7714863
2、http://blog.csdn.net/yanmy2012/article/details/8110316
3、http://blog.csdn.net/langb2014/article/details/45667921
参考资料:
1、张丽.《经典边缘检测算子比较》.南京信息工程大学.
2、百度百科“Sobel算子”
3、http://blog.csdn.net/a361251388leaning/article/details/50288479
4、http://blog.csdn.net/zouxy09/article/details/8775488