边缘检测
1、Sobel
2、Laplace
3、Roberts
4、Canny
Canny
canny对边缘检测质量进行分析时,有3个原则:
- 1、信噪比准则
- 2、定位精度准则
- 3、单边缘响应准则
canny边缘检测的基本思想是:首先对图像选择一定的Gauss滤波器进行平滑滤波,然后采用非极值抑制技术进行处理得到最后的边缘图像。
Canny算法基本可分为4个步骤:
步骤一:
- 滤波平滑噪声。
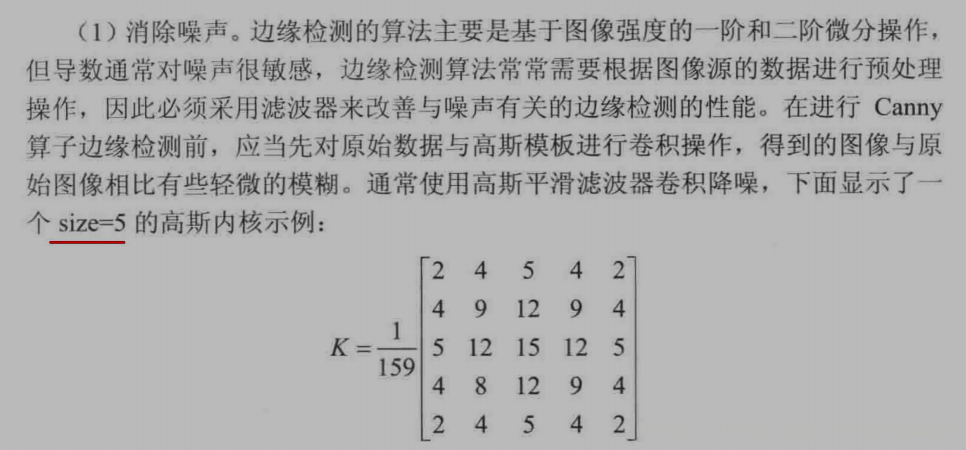
GaussianBlur(src,dst,Size(3,3),1.5,1.5);步骤二:
- 利用已有的一阶偏导算子计算梯度。一般用sobel

步骤三:
步骤四:
- 双阈值法抑制假边缘,连接真边缘
核心函数:
void Canny(InputArray image,OutputArray edges, double threshold1, double threshold2, int apertureSize=3,bool L2gradient=false )- InputArray类型的image,输入图像,即源图像,填Mat类的对象即可,且需为单通道8位图像。
- OutputArray类型的edges,输出的边缘图,需要和源图片有一样的尺寸和类型。
- double类型的threshold1,第一个滞后性阈值。值越大,找到的边缘越少
- double类型的threshold2,第二个滞后性阈值。
- int类型的apertureSize,表示应用Sobel算子的孔径大小,其有默认值3。
- bool类型的L2gradient,一个计算图像梯度幅值的标识,有默认值false。
调用代码:
#include<opencv2/opencv.hpp>
#include<iostream>
using namespace std;
using namespace cv;
void main()
{
Mat srcImage = imread("F:\\opencv_re_learn\\2.jpg");
if (!srcImage.data){
cout << "falied to read" << endl;
system("pause");
return;
}
Mat srcGray;
cvtColor(srcImage, srcGray, CV_BGR2GRAY);
//高斯滤波
GaussianBlur(srcGray, srcGray, Size(3, 3),
0, 0, BORDER_DEFAULT);
//Canny检测
int edgeThresh =100;
Mat Canny_result;
Canny(srcImage, Canny_result, edgeThresh, edgeThresh * 3, 3);
imshow("src", srcImage);
imshow("Canny_result", Canny_result);
waitKey(0);
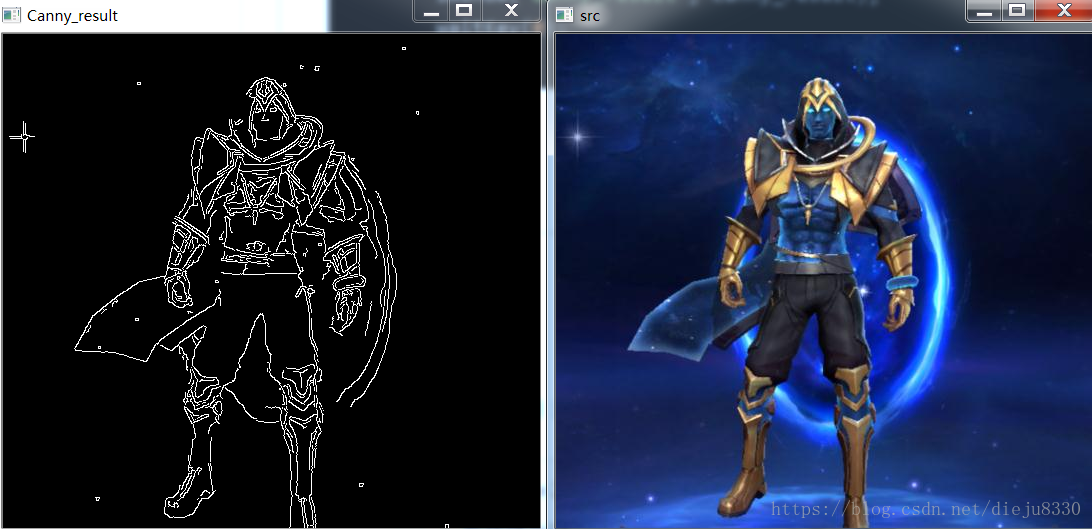
}实现效果: